TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024067864
公報種別
公開特許公報(A)
公開日
2024-05-17
出願番号
2022178242
出願日
2022-11-07
発明の名称
電動航空機
出願人
株式会社SUBARU
代理人
個人
主分類
B64D
27/40 20240101AFI20240510BHJP(航空機;飛行;宇宙工学)
要約
【課題】eVTOL等の電動航空機の重量を軽減することである。
【解決手段】電動航空機は、胴体と、少なくとも1つのロータと、前記胴体に前記ロータを連結する連結構造と、前記ロータを回転させる電動モータと、前記胴体に取付けられ、前記電動モータに電流を供給するバッテリとを備え、前記バッテリと前記電動モータを電気的に接続する配線の少なくとも一部を前記連結構造の少なくとも一部を構成する剛体の導体とし、前記剛体の導体で少なくとも1つの前記ロータから前記胴体にかかる荷重の少なくとも一部を受けるようにしたものである。
【選択図】図1
特許請求の範囲
【請求項1】
胴体と、
少なくとも1つのロータと、
前記胴体に前記ロータを連結する連結構造と、
前記ロータを回転させる電動モータと、
前記胴体に取付けられ、前記電動モータに電流を供給するバッテリと、
を備え、
前記バッテリと前記電動モータを電気的に接続する配線の少なくとも一部を前記連結構造の少なくとも一部を構成する剛体の導体とし、前記剛体の導体で少なくとも1つの前記ロータから前記胴体にかかる荷重の少なくとも一部を受けるようにした電動航空機。
続きを表示(約 400 文字)
【請求項2】
前記連結構造は、
パネルと、
前記パネルを補強する補強部材と、
を少なくとも一部に有し、
前記補強部材を前記剛体の導体とした請求項1記載の電動航空機。
【請求項3】
前記補強部材を絶縁性を有する繊維強化プラスチックからなる絶縁材料で被覆した請求項2記載の電動航空機。
【請求項4】
前記パネルを炭素繊維強化プラスチックで構成する一方、前記補強部材をアルミニウム又は銅で構成し、前記絶縁材料で被覆された前記補強部材を接着剤で前記パネルに接着した請求項3記載の電動航空機。
【請求項5】
前記連結構造をパイプ状のアームとし、
前記アームの一部を前記補強部材で補強した前記パネルで構成する一方、前記アームの別の一部をサンドイッチ構造で構成した請求項2乃至4のいずれか1項に記載の電動航空機。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、電動航空機に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
航空機の一種として、電動垂直離着陸機(eVTOL:electric Vertical Take-Off and Landing aircraft)や電動短距離離着陸機(eSTOL:electric Short Take‐Off and Landing aircraft)に代表される電動航空機が知られている(例えば特許文献1及び特許文献2参照)。
【0003】
eVTOLに分類される回転翼航空機としては、電動式のヘリコプタ及びマルチコプタが挙げられる。ヘリコプタは、メインロータとテールロータを有する回転翼航空機であるのに対して、マルチコプタは、4つのロータを有するクワッドコプタや6つのロータを有するヘキサコプタのように3つ以上のロータを有する回転翼航空機である。近年ではヘリコプタやマルチコプタ等の無人航空機(UAV:Unmanned aerial vehicle)がドローンと呼ばれるのに対して、マルチコプタからなる有人航空機は空飛ぶクルマとも呼ばれる場合もある。
【0004】
ヘリコプタ及びマルチコプタ等の電動式の回転翼航空機は、複数のロータをそれぞれ回転させるための救数の電動モータと、各電動モータに電力を供給するためのバッテリを搭載している。典型的な回転翼航空機の場合には、胴体に配置された共通のバッテリから、各ロータの下方に配置される電動モータに電力が供給される。
【先行技術文献】
【特許文献】
【0005】
特開2016-222031号公報
特開2021-066330号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、バッテリから各電動モータに大電流を供給する場合、断面積が大きい配線を電動航空機の胴体から各電動モータに向かって敷設することが必要となる。このため、電動航空機の重量増加に繋がる。
【0007】
そこで本発明は、eVTOL等の電動航空機の重量を軽減することを目的とする。
【課題を解決するための手段】
【0008】
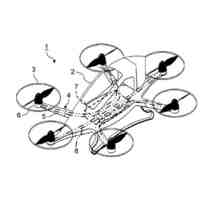
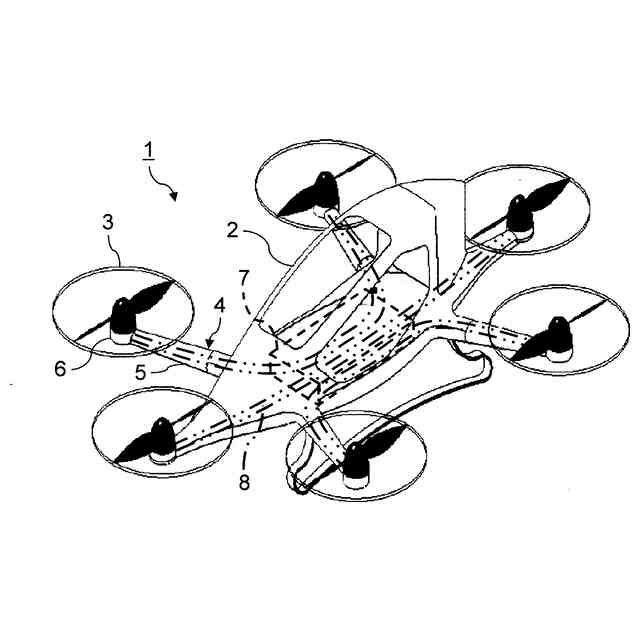
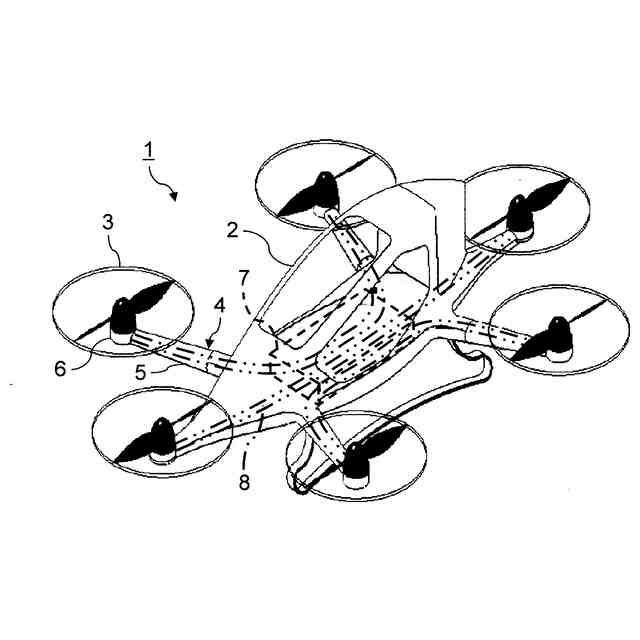
本発明の実施形態に係る電動航空機は、胴体と、少なくとも1つのロータと、前記胴体に前記ロータを連結する連結構造と、前記ロータを回転させる電動モータと、前記胴体に取付けられ、前記電動モータに電流を供給するバッテリとを備え、前記バッテリと前記電動モータを電気的に接続する配線の少なくとも一部を前記連結構造の少なくとも一部を構成する剛体の導体とし、前記剛体の導体で少なくとも1つの前記ロータから前記胴体にかかる荷重の少なくとも一部を受けるようにしたものである。
【図面の簡単な説明】
【0009】
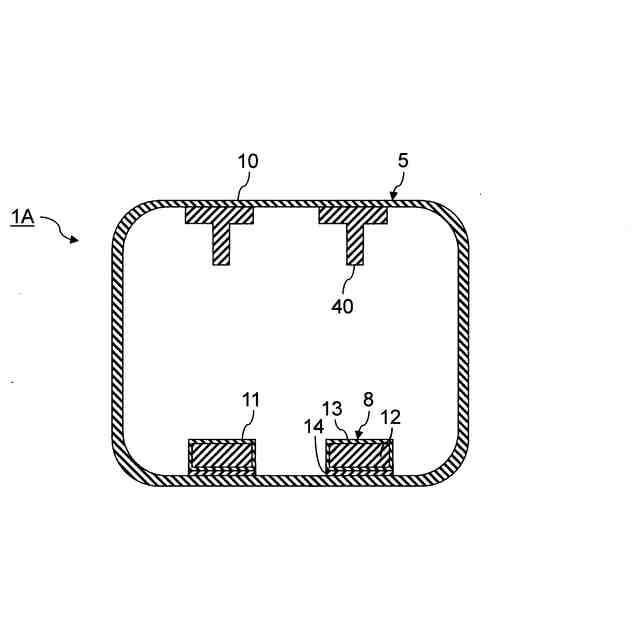
本発明の第1の実施形態に係る電動航空機の構成例を示す斜視図。
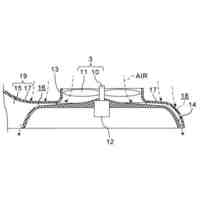
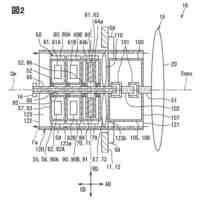
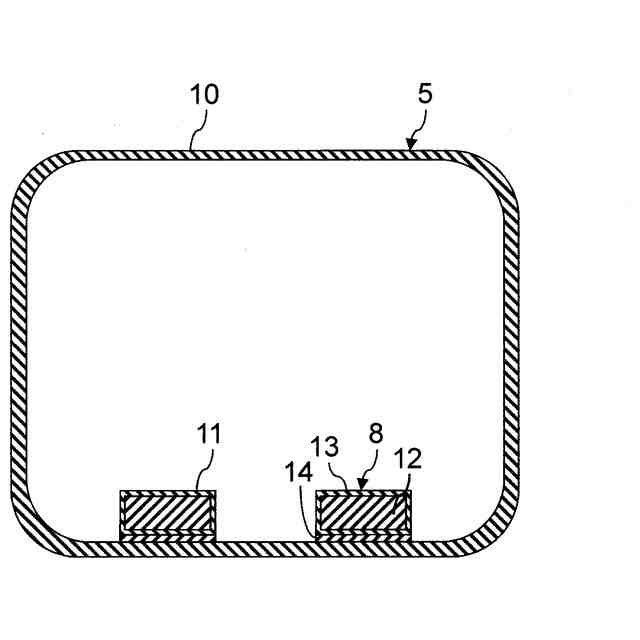
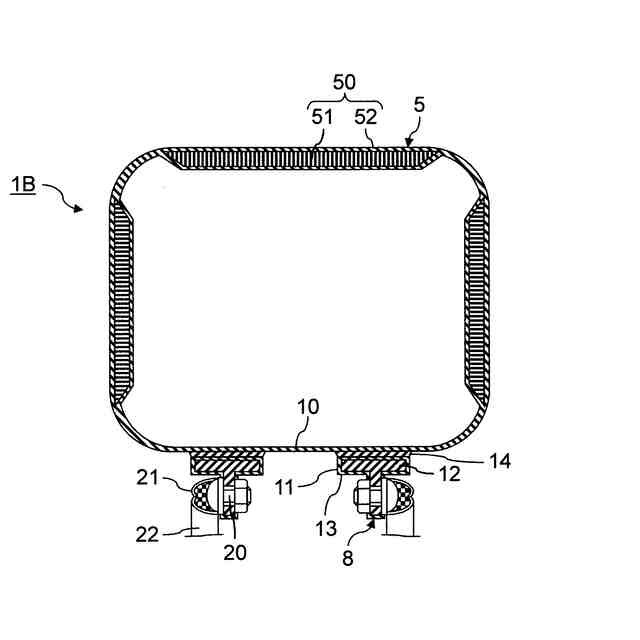
図1に示す配線を含むアームの構造例を示す横断面図。
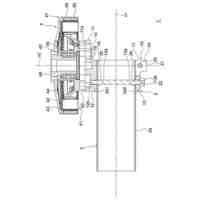
図2に示す剛体の導体の接点における構造例を示す上面図。
図3に示す剛体の導体の位置A-Aにおける横断面図。
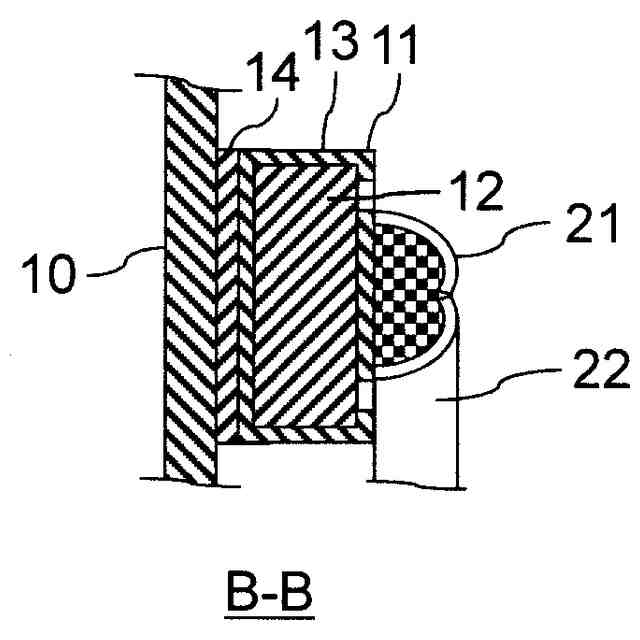
図3に示す剛体の導体の位置B-Bにおける横断面図。
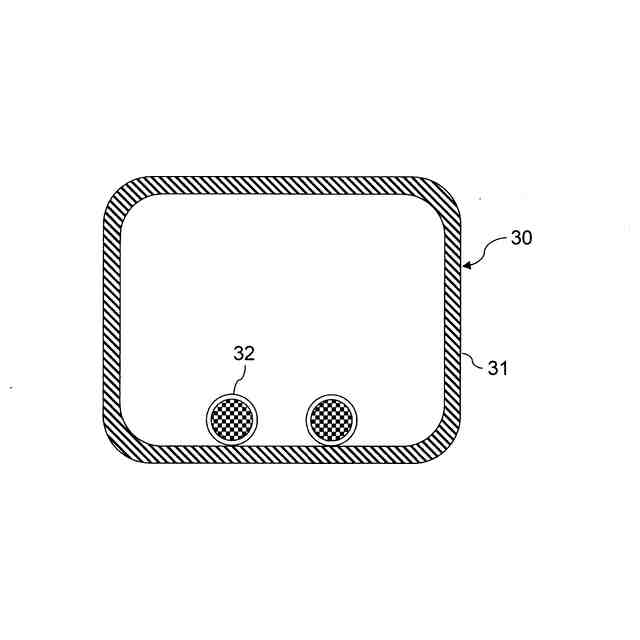
単純なパネル構造を有する従来のアームの横断面図。
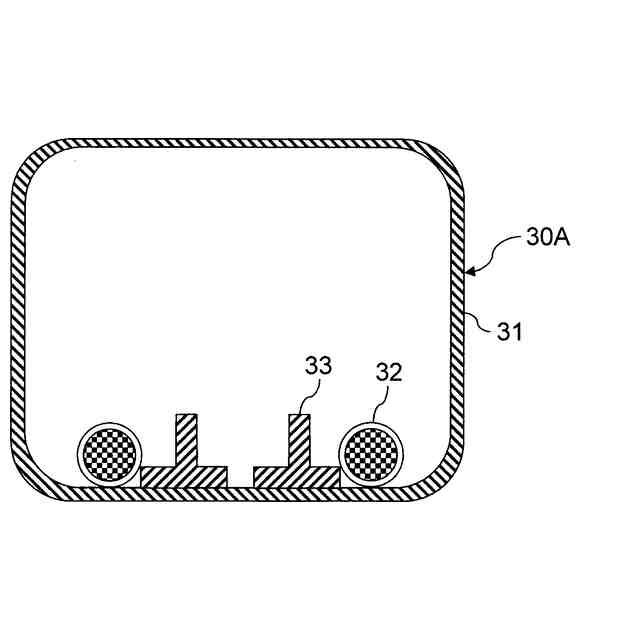
パネルをストリンガで補強した従来のアームの横断面図。
本発明の第2の実施形態に係る電動航空機のアームの構造例を示す横断面図。
本発明の第3の実施形態に係る電動航空機のアームの構造例を示す横断面図。
ハニカムサンドイッチ構造を有する従来のアームの横断面図。
本発明の第4の実施形態に係る電動航空機のアームの構造例を示す横断面図。
本発明の第5の実施形態に係る電動航空機のアームの構造例を示す横断面図。
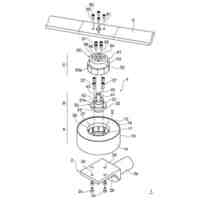
本発明の第6の実施形態に係る電動航空機のアームに補強部材として取付けられる剛体の導体を含む配線図。
図13の位置C-Cにおける剛体の導体を含むアームの横断面図。
本発明の第7の実施形態に係る電動航空機に設けられる剛体の導体を含む配線図。
【発明を実施するための形態】
【0010】
本発明の実施形態に係る電動航空機について添付図面を参照して説明する。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
ドローン
1か月前
個人
ドローンシステム
3か月前
個人
陸海空用の乗り物
11日前
株式会社三圓
浮上装置
7か月前
個人
空港用貨物搬送車
11か月前
個人
ドローンの計測操作方法2
7か月前
個人
垂直離着陸機用エンジン改
2か月前
個人
ドローンの計測操作方法3
7か月前
個人
飛行艇
9か月前
キヤノン電子株式会社
磁気トルカ
8か月前
個人
人工衛星推進材循環エンジン
12か月前
個人
空中移動システム
4か月前
個人
ドローンを自動離着陸する方法
3か月前
個人
ドローン消音装置
5か月前
個人
エアライナー全自動パラシュート
1か月前
トヨタ自動車株式会社
ドローン
1か月前
株式会社ACSL
システム
1か月前
株式会社中北製作所
羽ばたき装置
11か月前
株式会社セネック
ドローンポート
10か月前
株式会社セネック
ドローンポート
10か月前
合同会社アドエア
パラシュート射出装置
1か月前
株式会社SUBARU
電動航空機
11か月前
合同会社アドエア
飛行体の落下補助装置
4か月前
株式会社ACSL
システム
1か月前
個人
垂直離着陸機用ガスタービンエンジン
3か月前
株式会社SUBARU
回転翼航空機
11か月前
全日本空輸株式会社
ドーリシステム
6か月前
株式会社SUBARU
移動体
4か月前
ミネベアミツミ株式会社
無人機
1か月前
ミネベアミツミ株式会社
無人機
1か月前
HDサービス合同会社
カメラ装着装置
5か月前
株式会社SUBARU
構造体の製造方法
8か月前
株式会社SUBARU
構造体の製造方法
8か月前
本田技研工業株式会社
航空機
6か月前
株式会社デンソー
推進装置
9か月前
本田技研工業株式会社
航空機
6か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ