TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024071172
公報種別
公開特許公報(A)
公開日
2024-05-24
出願番号
2022181985
出願日
2022-11-14
発明の名称
マニピュレータ
出願人
株式会社SOKEN
,
株式会社デンソー
代理人
弁理士法人あいち国際特許事務所
主分類
B25J
19/06 20060101AFI20240517BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】安全性を確保しつつ、作業性を向上することができるマニピュレータを提供すること。
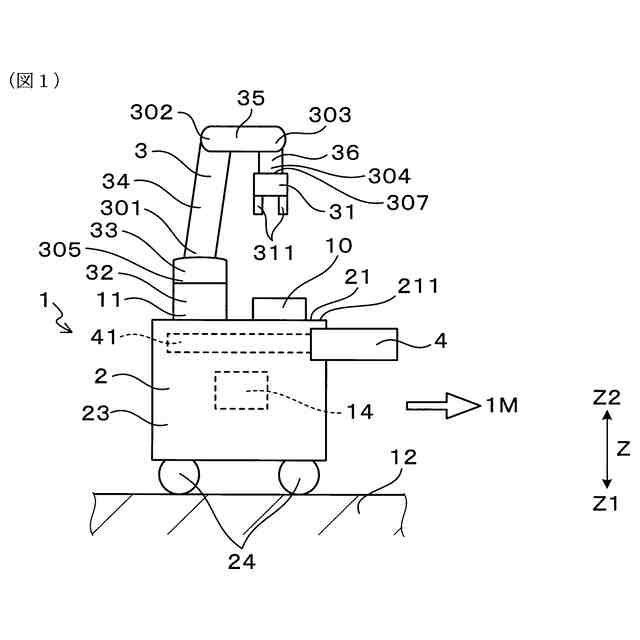
【解決手段】マニピュレータ1は、走行体2と、アーム部3と、バンパ4と、移動部41と、を備える。バンパ4は、走行体2に対し移動できるよう構成されると共に、上下方向Zから見たとき、少なくとも一部が、走行体2の外周よりも外側において移動できるよう構成されている。移動部41は、バンパ4を走行体2に対し移動させる。また、アーム部3は、エンドエフェクタ31を備えると共に、走行体2に対してエンドエフェクタ31を移動させることができるよう構成されている。マニピュレータ1は、走行体2が走行している状態において、上下方向Zから見て、エンドエフェクタ31の少なくとも一部が、バンパ4の少なくとも一部と走行体2との間の位置、及び走行体2と重なる位置のうち、少なくとも一方の位置となるよう制御する。
【選択図】図1
特許請求の範囲
【請求項1】
走行体(2)と、
該走行体に接続されると共に、ワーク(10)に対し作業を行うアーム部(3)と、
上記走行体に対し移動できるよう構成されると共に、上下方向(Z)から見たとき、少なくとも一部が、上記走行体の外周(22)よりも外側において移動できるよう構成されたバンパ(4)と、
該バンパを上記走行体に対し移動させる移動部(41)と、を備えたマニピュレータ(1)であって、
上記アーム部は、エンドエフェクタ(31)を備えると共に、上記走行体に対して該エンドエフェクタを移動させることができるよう構成されており、
上記走行体が走行している状態において、上記上下方向から見て、上記エンドエフェクタの少なくとも一部が、上記バンパの少なくとも一部と上記走行体との間の位置、及び上記走行体と重なる位置のうち、少なくとも一方の位置となるよう制御する、マニピュレータ。
続きを表示(約 1,000 文字)
【請求項2】
上記走行体が走行している状態において、上記エンドエフェクタの少なくとも一部が、上記バンパ及び上記走行体の双方を上記上下方向の上側(Z2)に投影した投影領域(R)内に位置するよう制御する、請求項1に記載のマニピュレータ。
【請求項3】
上記走行体は、上記ワークを載置することができる走行体作業台(21)を有し、上記アーム部は、上記走行体作業台に上記ワークを載置した状態にて、上記ワークに対し作業を行うことができるよう構成されている、請求項1又は2に記載のマニピュレータ。
【請求項4】
上記移動部は、上記アーム部と上記走行体との接続部(11)よりも上記上下方向の下側(Z1)において上記バンパを移動させるよう構成されている、請求項1又は2に記載のマニピュレータ。
【請求項5】
上記バンパの上記上下方向の投影面積であって、上記上下方向から見て、上記走行体の外周よりも外側における上記バンパの上記投影面積の大きさを変更するように、上記移動部は上記バンパを移動させる、請求項1又は2に記載のマニピュレータ。
【請求項6】
上記バンパは、上記ワークを載置することができるバンパ作業台(42)を有し、上記アーム部は、上記バンパ作業台に上記ワークを載置した状態にて、上記ワークに対し作業を行うことができるよう構成されている、請求項1又は2に記載のマニピュレータ。
【請求項7】
上記バンパが外部の物体(18)に接触したことを検知する接触検知センサ(43)が設置されており、上記接触検知センサによって上記バンパが上記外部の物体に接触したことを検知したとき、上記マニピュレータの少なくとも一部の動きを停止するよう構成されている、請求項1又は2に記載のマニピュレータ。
【請求項8】
上記バンパ及び上記走行体の双方を上記上下方向の上側(Z2)に投影した投影領域(R)に外部の物体(18)が侵入したことを検知する侵入検知センサ(19)が設置されており、上記侵入検知センサによって上記外部の物体の侵入を検知したとき、上記マニピュレータの少なくとも一部の動きを停止するよう構成されている、請求項1又は2に記載のマニピュレータ。
【請求項9】
上記アーム部を2つ以上有し、少なくとも一つの上記アーム部は上記移動部でもある、請求項1又は2に記載のマニピュレータ。
発明の詳細な説明
【技術分野】
【0001】
本発明は、マニピュレータに関する。
続きを表示(約 3,400 文字)
【背景技術】
【0002】
例えば、特許文献1に開示されているように、作業ロボットを搭載した移動台車であって、移動台車の移動中において、作業ロボットに、作業台に載置した移載物に対して各種作業を行わせるよう構成された移動台車が知られている。特許文献1に記載の移動台車は、作業ロボットにおける移動台車の平面投影範囲からのはみ出し量の制御や、作業台を囲う衝立を設けることにより、作業ロボットの動作範囲を規制している。これにより、移動台車の移動中における作業ロボットと作業者等との衝突事故を未然に防止し、安全性の確保を図っている。
【先行技術文献】
【特許文献】
【0003】
特開2018-111180号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の移動台車は、作業ロボットにおける移動台車の平面投影範囲からのはみ出し量の制御や、作業台を囲う衝立を設けることにより、作業ロボットの動作範囲を規制しているため、作業ロボットの動作範囲が狭くなりやすい。それゆえ、特許文献1に記載の移動台車は、作業性の観点から、改善の余地があるといえる。
【0005】
本発明は、かかる課題に鑑みてなされたものであり、安全性を確保しつつ、作業性を向上することができるマニピュレータを提供しようとするものである。
【課題を解決するための手段】
【0006】
本発明の一態様は、走行体(2)と、
該走行体に接続されると共に、ワーク(10)に対し作業を行うアーム部(3)と、
上記走行体に対し移動できるよう構成されると共に、上下方向(Z)から見たとき、少なくとも一部が、上記走行体の外周(22)よりも外側において移動できるよう構成されたバンパ(4)と、
該バンパを上記走行体に対し移動させる移動部(41)と、を備えたマニピュレータ(1)であって、
上記アーム部は、エンドエフェクタ(31)を備えると共に、上記走行体に対して該エンドエフェクタを移動させることができるよう構成されており、
上記走行体が走行している状態において、上記上下方向から見て、上記エンドエフェクタの少なくとも一部が、上記バンパの少なくとも一部と上記走行体との間の位置、及び上記走行体と重なる位置のうち、少なくとも一方の位置となるよう制御する、マニピュレータにある。
【発明の効果】
【0007】
上記マニピュレータは、走行体が走行している状態において、上下方向から見て、エンドエフェクタの少なくとも一部が、バンパの少なくとも一部と走行体との間の位置、及び走行体と重なる位置のうち、少なくとも一方の位置となるよう制御する。それゆえ、走行体が走行している状態において、エンドエフェクタが外部に接触することを抑制しつつ、エンドエフェクタの可動範囲を大きくすることができる。その結果、安全性を確保しつつ、作業性を向上することができる。
【0008】
以上のごとく、上記態様によれば、安全性を確保しつつ、作業性を向上することができるマニピュレータを提供することができる。
なお、特許請求の範囲及び課題を解決する手段に記載した括弧内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものであり、本発明の技術的範囲を限定するものではない。
【図面の簡単な説明】
【0009】
実施形態1における、マニピュレータの外観図。
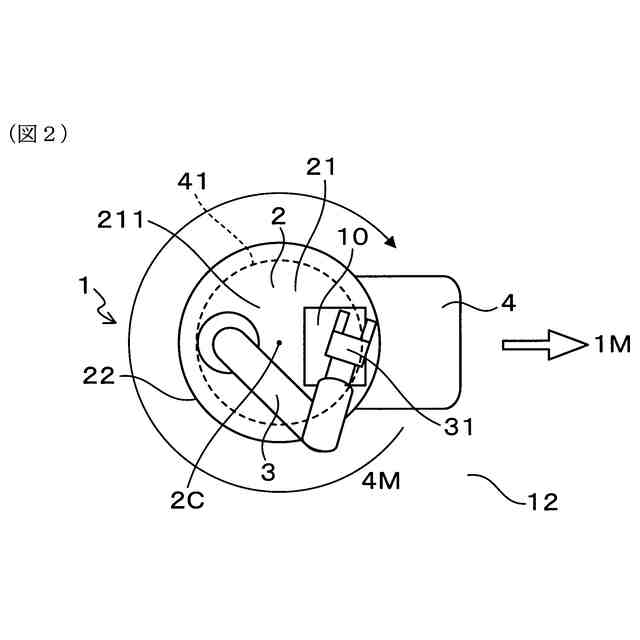
実施形態1における、マニピュレータを上側から見た図。
実施形態1における、エンドエフェクタ及びバンパの移動方向を示す図。
実施形態1における、エンドエフェクタ及びバンパが、図3の位置から移動した後の図。
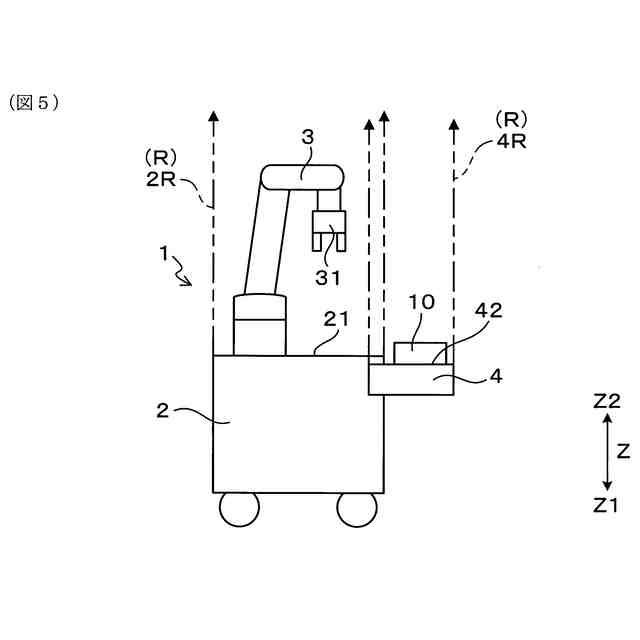
実施形態1における、投影領域を示す図。
比較形態における、マニピュレータを上側から見た図。
実施形態2における、マニピュレータの外観図。
実施形態3における、マニピュレータの外観図。
実施形態4における、マニピュレータの外観図。
実施形態5における、マニピュレータの外観図。
実施形態6における、マニピュレータの外観図。
実施形態7における、マニピュレータの外観図。
実施形態8における、マニピュレータの外観図。
実施形態8における、エンドエフェクタ及びバンパの移動方向を示す図。
実施形態8における、エンドエフェクタ及びバンパが、図14の位置から移動した後の図。
実施形態9における、マニピュレータの外観図。
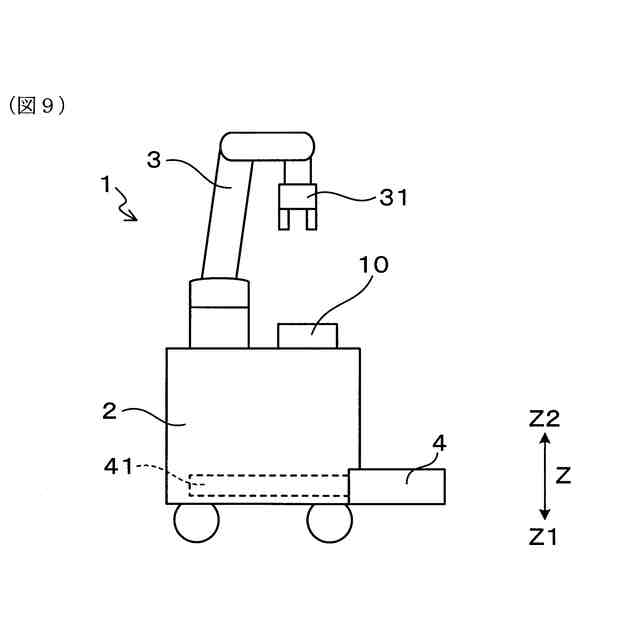
実施形態10における、バンパの移動方向を示す図。
実施形態10における、バンパが、図17の位置から移動した後の図。
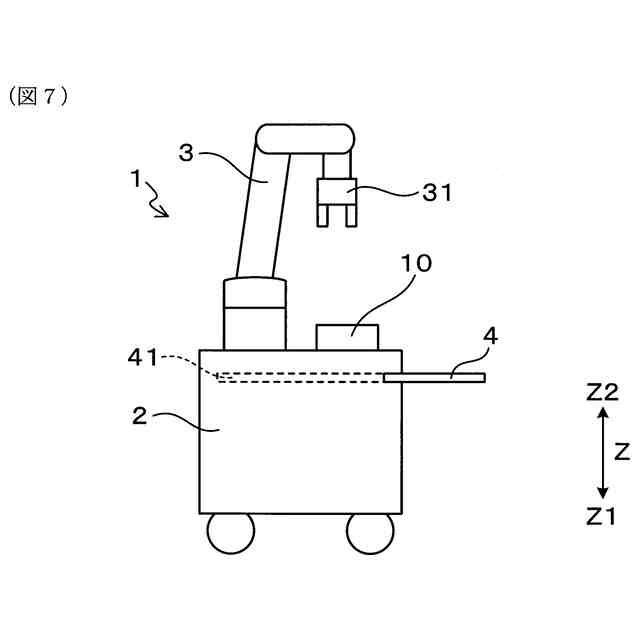
実施形態11における、バンパが収容部に収容される前の図。
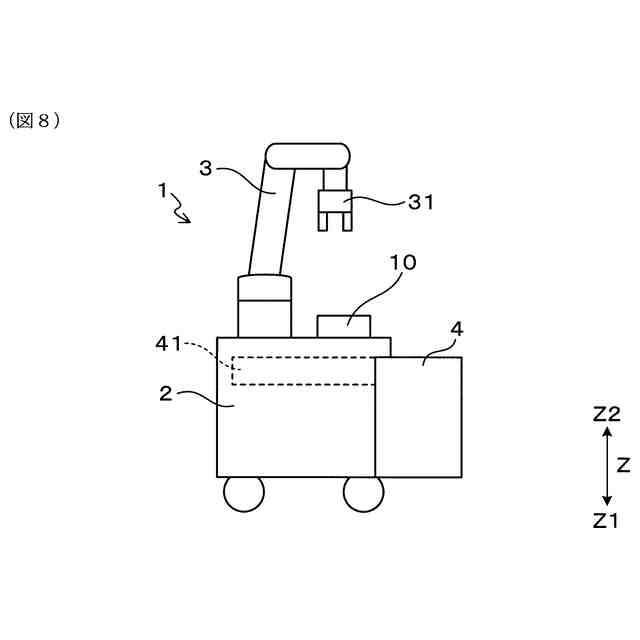
実施形態11における、バンパが収容部に収容された後の図。
実施形態11における、バンパが収容部に収容された後の図であって、マニピュレータを上側から見た図。
実施形態12における、バンパ及びワークが収容部に収容される前の図。
実施形態12における、バンパ及びワークが収容部に収容された後の図。
実施形態12における、バンパ及び交換用のエンドエフェクタが収容部に収容される前の図。
実施形態12における、バンパ及び交換用のエンドエフェクタが収容部に収容された後の図。
実施形態13における、エンドエフェクタ及びバンパの移動方向を示す図。
実施形態13における、バンパが、図26の位置から移動した後の図であって、バンパが作業者に接触したときの図。
実施形態14における、マニピュレータの外観図であって、投影領域を示す図。
実施形態15における、エンドエフェクタ及びバンパの移動方向を示す図。
実施形態15における、エンドエフェクタ及びバンパの移動方向を示す図であって、マニピュレータを上側から見た図。
実施形態15における、エンドエフェクタ及びバンパが、図29及び図30の位置から移動した後の図であって、バンパが作業者に接触したときの図。
実施形態15における、停止状態において、ワークをバンパから移動先の棚に移動させたときの図。
実施形態16における、マニピュレータの外観図。
実施形態17における、マニピュレータの外観図。
実施形態17における、エンドエフェクタ及びバンパの移動方向を示す図。
実施形態17における、エンドエフェクタ及びバンパが、図35の位置から移動した後の図。
実施形態18における、マニピュレータの外観図。
実施形態18における、エンドエフェクタ及びバンパの移動方向を示す図。
実施形態18における、エンドエフェクタ及びバンパが、図38の位置から移動した後の図。
実施形態19における、マニピュレータの外観図。
実施形態19における、エンドエフェクタ及びバンパの移動方向を示す図。
実施形態19における、エンドエフェクタ及びバンパが、図41の位置から移動した後の図。
実施形態20における、マニピュレータの外観図。
実施形態20における、エンドエフェクタの移動方向を示す図。
実施形態20における、エンドエフェクタが、図44の位置から移動した後の図。
【発明を実施するための形態】
【0010】
(実施形態1)
マニピュレータに係る実施形態について、図1~図5を参照して説明する。
本形態のマニピュレータ1は、図1、図2に示すごとく、走行体2と、アーム部3と、バンパ4と、移動部41と、を備える。アーム部3は、走行体2に接続されると共に、ワーク10に対し作業を行う。バンパ4は、走行体2に対し移動できるよう構成されると共に、図2に示すごとく、上下方向Zから見たとき、少なくとも一部が、走行体2の外周22よりも外側において移動できるよう構成されている。移動部41は、バンパ4を走行体2に対し移動させる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
7か月前
株式会社フジキン
レンチ
8か月前
個人
ねじ締め装置
6か月前
日東精工株式会社
搬送装置
2か月前
中国電力株式会社
腰袋
25日前
個人
ペットボトル用蓋開け具。
7か月前
株式会社ツノダ
挟持工具
2か月前
株式会社ツノダ
挟持工具
3か月前
UTM株式会社
搬送装置
6か月前
株式会社右川ゴム製造所
把持装置
2か月前
川崎重工業株式会社
ハンド
4か月前
個人
ロボットシステム
6か月前
学校法人立命館
グリッパ
3か月前
株式会社マキタ
動力工具
20日前
川崎重工業株式会社
罫書用治具
6日前
株式会社不二越
ロボット
6か月前
トヨタ自動車株式会社
関節機構
6か月前
学校法人立命館
ロボットハンド
3か月前
株式会社不二越
ロボット
8か月前
トヨタ自動車株式会社
関節機構
6か月前
個人
作業台
6か月前
株式会社ダイヘン
搬送装置
24日前
個人
プーリーキー抜き治具
3か月前
オムロン株式会社
ロボットハンド
8か月前
株式会社ダイヘン
搬送装置
24日前
株式会社近藤製作所
ロータリージョイント
8か月前
国立大学法人山形大学
二重関節機構
20日前
株式会社不二越
予測システム
4か月前
川崎重工業株式会社
ロボット
8か月前
CKD株式会社
電動把持装置
1か月前
宮川工機株式会社
板状部品移動装置
1か月前
東京都公立大学法人
ロボットハンド
1か月前
株式会社越智工業所
ブレーカ用カバー
5か月前
個人
スロープバリビス-ビス&-ドライバー
1か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
4か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ