TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024066437
公報種別
公開特許公報(A)
公開日
2024-05-15
出願番号
2023130677,2022174856
出願日
2023-08-10,2022-10-31
発明の名称
電子機器組立装置
出願人
株式会社不二越
代理人
個人
,
個人
主分類
B25J
15/00 20060101AFI20240508BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ケーブルの保持力を飛躍的に増大させると共に、幅寸法の異なる複数種類のケーブルの接続作業を行うことができる電子機器組立装置を提供する。
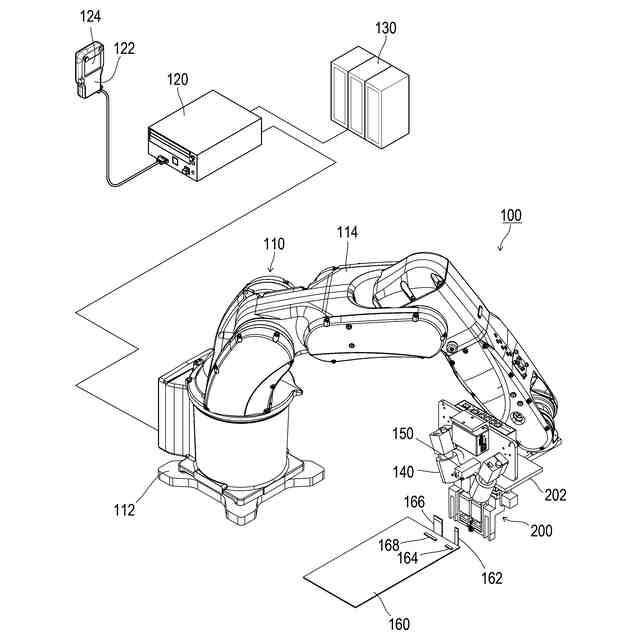
【解決手段】 平坦かつ柔軟なケーブル162、166の先端を回路基板160上のコネクタ164、168に挿入する電子機器組立装置において、把持装置200は、ケーブルの一方の側辺を厚み方向に把持する一対の爪を有する第1把持機構210と、ケーブルの他方の側辺を厚み方向に把持する一対の爪を有する第2把持機構212と、回転機構260と、第1把持機構と第2把持機構をケーブル幅方向に開閉する幅方向開閉機構240とを備え、幅方向開閉機構240は、第1把持機構と第2把持機構をケーブルの側辺に対して進退する方向に把持移動させる第1シリンダ244と、第1シリンダと同じ方向に幅調節移動させる第2シリンダ270とを含み、第2シリンダは所定位置で固定するロック機能を有している。
【選択図】図2
特許請求の範囲
【請求項1】
平坦かつ柔軟なケーブルの先端を回路基板上のコネクタに挿入する電子機器組立装置において、
前記ケーブルを把持する把持装置と、
前記把持装置を移動させるロボットアームと、
を備え、
前記把持装置は、
ケーブルの一方の側辺を厚み方向に把持する一対の爪を有する第1把持機構と、
ケーブルの他方の側辺を厚み方向に把持する一対の爪を有する第2把持機構と、
前記第1把持機構と前記第2把持機構とをケーブル幅方向に開閉する幅方向開閉機構と、
前記把持装置のうち前記第1把持機構及び前記第2把持機構を前記ケーブルの屈曲方向に回転させる回転機構とを備え、
前記幅方向開閉機構は、
前記第1把持機構と前記第2把持機構との少なくとも一方を、前記ケーブルの側辺に対して進退する方向に、把持と開放のための把持移動させる第1シリンダと、
前記第1把持機構と前記第2把持機構との少なくとも一方を、前記第1シリンダと同じ方向に、ケーブルの幅の違いに前記把持移動のストローク範囲を合わせるための幅調節移動させる第2シリンダとを含み、
前記第2シリンダは所定位置で固定するロック機能を有していることを特徴とする電子機器組立装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電子機器の回路基板などに接続されたケーブルを把持する電子機器組立装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
電子機器組立装置は、例えば工場などの生産現場で用いられる装置であり、FPC(Flexible Printed Circuit)やFFC(Flexible Flat Cable)などのケーブルの先端を回路基板上のコネクタに接続する。FPCのようなケーブルは、薄く、平坦であり、かつ可撓性がある。このようなケーブルは通常のハンド(フィンガー)で把持することができない。例えば特許文献1に記載の電子機器組立装置は、ケーブル先端の幅方向の位置を決めるチャックと、ケーブル先端の表面を吸引して吸着保持するケーブル吸着部とを備えている。
【先行技術文献】
【特許文献】
【0003】
特許第6500247号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、吸引では保持する力が不足する場合がある。そのためケーブル先端をコネクタに突き当てたときにケーブルが後退してしまったり、斜めに傾いてしまったりするおそれがある。
【0005】
また従来の電子機器組立装置では同一幅のコネクタにしか対応できなかった。このため複数種類のケーブルの配線作業を行う場合には、ロボットに複数のハンドを搭載するか、またはハンド交換装置等を用いてハンドを交換する必要が発生する。
【0006】
ロボットに複数ハンドを搭載する場合、ハンド重量が重くなって、より可搬質量の大きなロボットを使わざるを得ず、スペースやコストが大きくなるという問題がある。ハンドを交換して対応する場合、ハンドを交換するための時間や、別の種類のハンドを置いておくスペースが必要になるという問題がある。
【0007】
本発明は、このような課題に鑑み、ケーブルの保持力を飛躍的に増大させると共に、幅寸法の異なる複数種類のケーブルの接続作業を行うことができる電子機器組立装置を提供することを目的としている。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明の代表的な構成は、平坦かつ柔軟なケーブルの先端を回路基板上のコネクタに挿入する電子機器組立装置において、ケーブルを把持する把持装置と、把持装置を移動させるロボットアームと、を備え、把持装置は、ケーブルの一方の側辺を厚み方向に把持する一対の爪を有する第1把持機構と、ケーブルの他方の側辺を厚み方向に把持する一対の爪を有する第2把持機構と、第1把持機構と第2把持機構とをケーブル幅方向に開閉する幅方向開閉機構と、把持装置のうち第1把持機構及び第2把持機構をケーブルの屈曲方向に回転させる回転機構とを備え、幅方向開閉機構は、第1把持機構と第2把持機構との少なくとも一方を、ケーブルの側辺に対して進退する方向に、把持と開放のための把持移動させる第1シリンダと、第1把持機構と第2把持機構との少なくとも一方を、第1シリンダと同じ方向に、ケーブルの幅の違いに把持移動のストローク範囲を合わせるための幅調節移動させる第2シリンダとを含み、第2シリンダは所定位置で固定するロック機能を有していることを特徴とする。
【発明の効果】
【0009】
本発明によれば、ケーブルの保持力を飛躍的に増大させると共に、幅寸法の異なる複数種類のケーブルの接続作業を行うことができる電子機器組立装置を提供することができる。
【図面の簡単な説明】
【0010】
本発明の実施形態における電子機器組立装置の全体の構成を示す斜視図である。
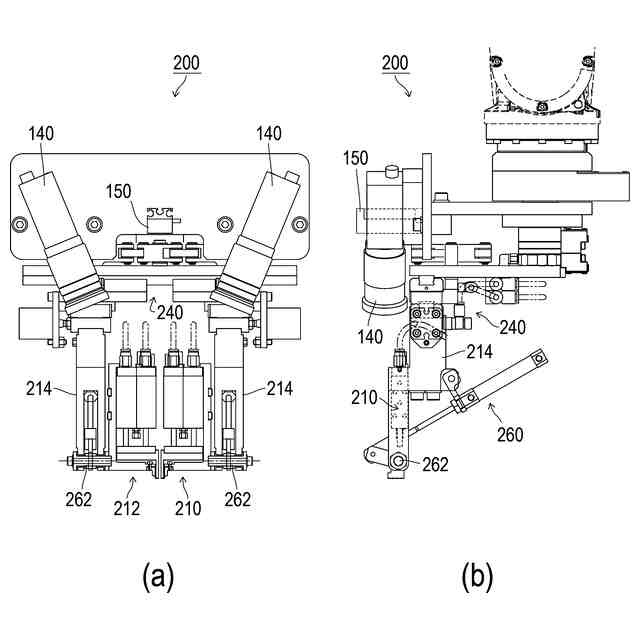
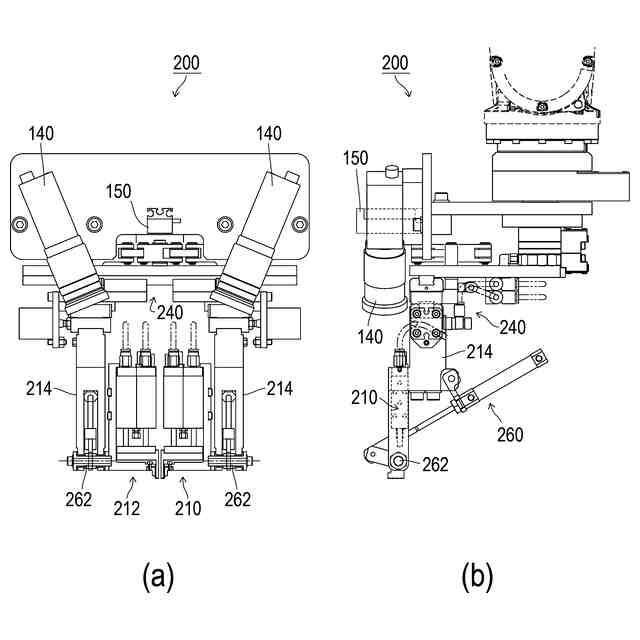
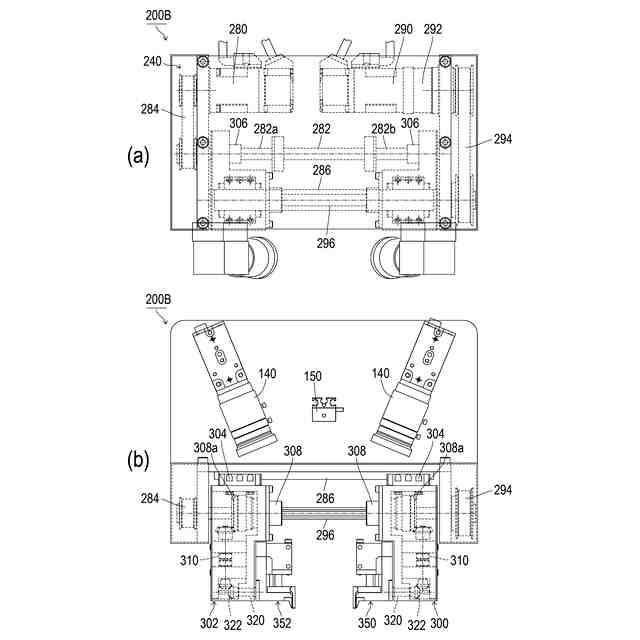
図1の把持装置の正面図および側面図である。
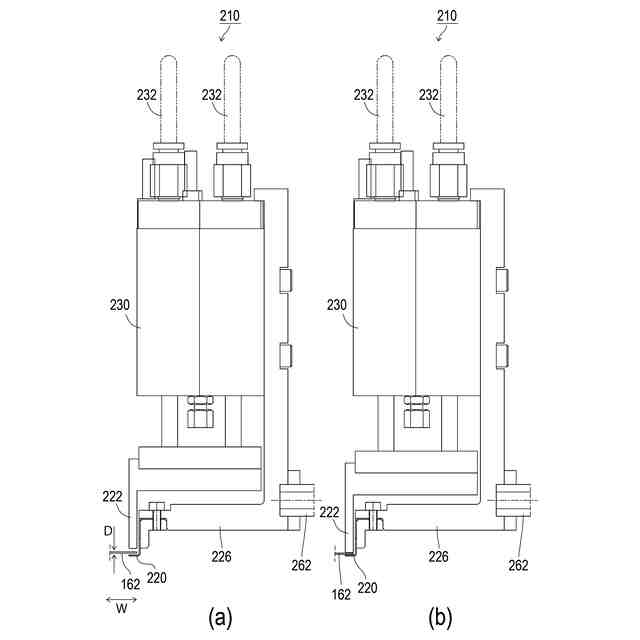
図2の第1把持機構を説明する部分拡大図である。
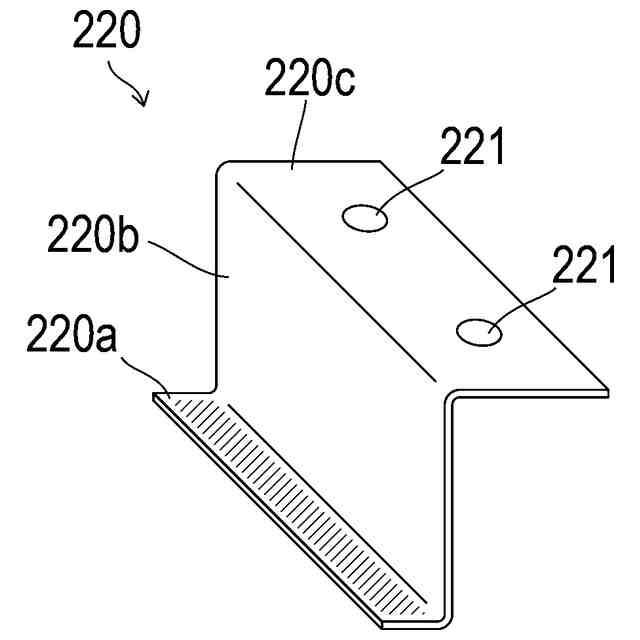
図3の第1爪を説明する斜視図である。
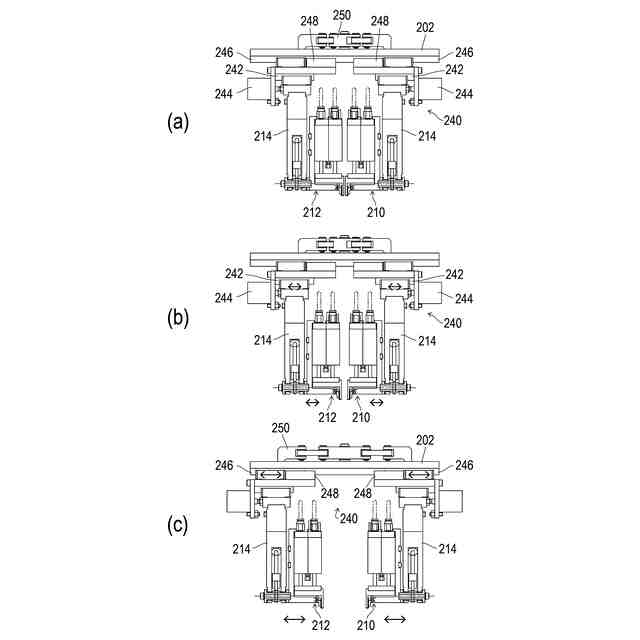
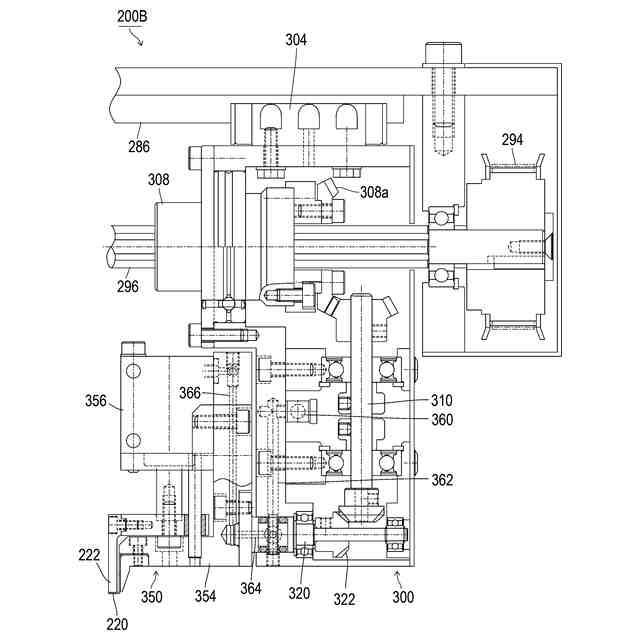
図2の第1把持機構、第2把持機構の幅方向開閉機構を説明する図である。
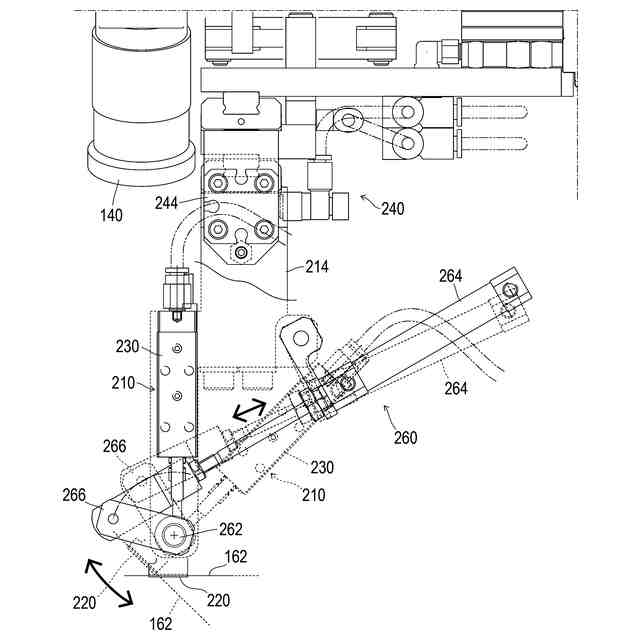
図2の第1把持機構、第2把持機構の回転機構を説明する図である。
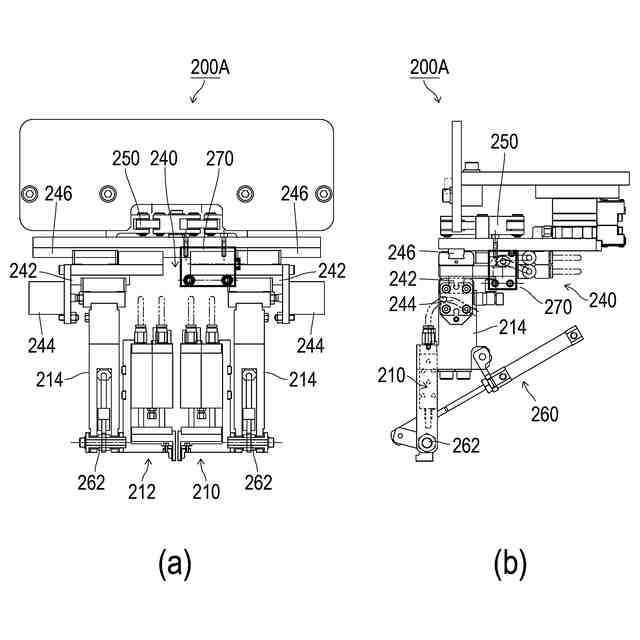
他の実施形態にかかる把持装置の正面図および側面図である。
さらに他の実施形態にかかる把持装置の正面図および平面図である。
図8に示した把持装置の把持機構を説明する図である。
図9の回転軸近傍を示す拡大図である。
図6に示した把持装置の他の実施形態を説明する図である。
図6に示した把持装置の他の実施形態を説明する図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社不二越
ドリル
3日前
株式会社不二越
熱処理システム
17日前
株式会社不二越
可変容量型ピストンポンプ
15日前
個人
釘抜き機
7か月前
個人
ねじ締め装置
6か月前
日東精工株式会社
搬送装置
2か月前
中国電力株式会社
腰袋
1か月前
株式会社ツノダ
挟持工具
4か月前
UTM株式会社
搬送装置
7か月前
株式会社ツノダ
挟持工具
3か月前
個人
ペットボトル用蓋開け具。
8か月前
日東工器株式会社
衝撃工具
1日前
株式会社右川ゴム製造所
把持装置
2か月前
川崎重工業株式会社
ハンド
4か月前
個人
ロボットシステム
6か月前
学校法人立命館
グリッパ
3か月前
川崎重工業株式会社
罫書用治具
18日前
学校法人立命館
ロボットハンド
3か月前
トヨタ自動車株式会社
関節機構
6か月前
株式会社マキタ
動力工具
1か月前
トヨタ自動車株式会社
関節機構
7か月前
株式会社不二越
ロボット
6か月前
株式会社不二越
ロボット
8か月前
株式会社ダイヘン
搬送装置
1か月前
個人
プーリーキー抜き治具
3か月前
トヨタ自動車株式会社
ハンド構造
8日前
株式会社ダイヘン
搬送装置
1か月前
個人
作業台
7か月前
東京都公立大学法人
ロボットハンド
1か月前
株式会社不二越
予測システム
4か月前
宮川工機株式会社
板状部品移動装置
1か月前
CKD株式会社
電動把持装置
1か月前
国立大学法人山形大学
二重関節機構
1か月前
小倉クラッチ株式会社
ロボットハンド
6か月前
株式会社ダイヘン
画像生成装置
2か月前
株式会社ダイヘン
情報処理装置
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































