TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024063790
公報種別
公開特許公報(A)
公開日
2024-05-14
出願番号
2022171868
出願日
2022-10-27
発明の名称
速度計画装置、速度計画方法、および、プログラム
出願人
三菱電機株式会社
代理人
弁理士法人山王内外特許事務所
主分類
B60W
30/08 20120101AFI20240507BHJP(車両一般)
要約
【課題】複数の道路が接続する接続地点を含む接続領域において、接続する一方の道路から流入した車両と、接続された他方の道路を進行する移動障害物とが干渉しないようにする。
【解決手段】第1の道路が第2の道路に接続する接続地点を含む接続領域において第1の道路から進行する第1の車両の速度を計画する速度計画装置であって、第2の道路を進行する移動障害物の位置および速度を含む障害物情報を取得し、当該障害物情報を用いて接続地点における、移動障害物の予測到達時間、および、速度を含む障害物状態を算出する障害物状態予測部(210)と、第1の車両の車両状態を示す車両情報、および、第1の車両の周辺環境情報を取得し、周辺環境情報、車両情報、および、障害物予測状態情報を用いて、移動障害物に干渉しない目標到達時間、および目標速度を含む目標状態を算出する目標状態演算部(220)と目標状態情報を用いて速度計画情報を算出する。
【選択図】図1
特許請求の範囲
【請求項1】
第1の道路が第2の道路に接続する接続地点を含む接続領域において前記第1の道路から前記接続領域に進行する第1の車両の速度を計画する速度計画装置であって、
前記第2の道路を進行する移動障害物の位置および速度を含む障害物状態を示す障害物情報を取得し、当該障害物情報を用いて前記接続地点における、前記移動障害物の予測到達時間、および、前記移動障害物の速度を含む障害物状態を示す障害物予測状態情報、を算出する障害物状態予測部と、
前記第1の道路における前記第1の車両の位置および速度を含む車両状態を示す車両情報、および、前記第1の車両の周辺環境を示す周辺環境情報を取得し、当該周辺環境情報、前記車両情報、および、前記障害物予測状態情報を用いて、前記第1の車両が前記接続地点に到達した場合において、前記移動障害物に干渉しない目標到達時間、および、前記移動障害物の状態に干渉しない目標速度を含む目標状態を示す目標状態情報、を算出する目標状態演算部と、
前記目標状態情報を用いて、前記接続領域における前記第1の車両の速度パターンを含む速度計画情報を算出する速度計画部と、
を備えた速度計画装置。
続きを表示(約 1,300 文字)
【請求項2】
前記接続地点は、前記第1の道路が前記第2の道路に合流する合流地点である、
請求項1に記載の速度計画装置。
【請求項3】
前記接続地点は、前記第1の道路と前記第2の道路とが交差する交差点である、
請求項1に記載の速度計画装置。
【請求項4】
前記移動障害物の位置および前記第1の車両の位置はそれぞれ、前記接続地点を基準にして表現された情報で示される、
請求項1から請求項3のうちのいずれか1項に記載の速度計画装置。
【請求項5】
前記目標状態情報は、前記第1の車両が前記接続地点に到達した場合において前記移動障害物の状態に干渉しない加速度である目標加速度をさらに含み、
前記速度計画部は、前記第1の車両が前記接続地点に到達した場合において前記目標加速度を満たす前記速度パターンを算出する、
請求項1から請求項3のうちのいずれか1項に記載の速度計画装置。
【請求項6】
前記目標状態情報は、前記第1の車両が前記接続地点に到達した場合において前記移動障害物の状態に干渉しない躍度である目標躍度をさらに含み、
前記速度計画部は、前記第1の車両が前記接続地点に到達した場合において前記目標躍度を満たす前記速度パターンを算出する、
請求項1から請求項3のうちのいずれか1項に記載の速度計画装置。
【請求項7】
前記速度計画部は、
前記目標状態情報を算出する際に用いられた前記第1の車両の車両状態を初期状態にして、当該初期状態から前記目標状態情報に示される目標状態に到達するまでの前記速度パターンを算出する、
請求項1から請求項3のうちのいずれか1項に記載の速度計画装置。
【請求項8】
前記速度計画部は、
前記接続地点における状態から前記目標状態に到達させるような第1の速度パターンを算出し、
前記第1の速度パターンにより前記目標状態に到達した状態から、前記第1の車両が前記接続地点に到達する到達目標時間までの第2の速度パターンを算出し、
前記第1の速度パターンと前記第2の速度パターンとを結合して前記速度パターンを算出する、
請求項1から請求項3のうちのいずれか1項に記載の速度計画装置。
【請求項9】
前記速度計画部は、
前記車両状態を示す値と前記目標状態を示す値とを境界条件にして、当該境界条件を満たした、時間を変数にした速度を連続的に示す連続関数、で表される速度パターンを算出する、
請求項1から請求項3のうちのいずれか1項に記載の速度計画装置。
【請求項10】
前記車両情報および前記周辺環境情報を用いて、前記接続地点までに到達可能な状態の範囲を示す到達可能範囲を算出する到達可能範囲演算部をさらに備え、
前記目標状態演算部は、前記到達可能範囲の範囲内の目標状態を示す前記目標状態情報を出力する、
請求項1から請求項3のうちのいずれか1項に記載の速度計画装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示技術は、複数の道路が接続する接続地点を含む接続領域において、走行する車両の速度を計画する速度計画技術に関する。
続きを表示(約 4,600 文字)
【背景技術】
【0002】
従来の速度計画技術の中には、特許文献1の「走行支援システム」のように、高速道路の本線と合流路との合流地点において、合流路から本線へ車線変更する車両の走行を支援する技術がある。
具体的には、特許文献1には、高速道路の本線といった「特定の車線への車線変更を予定している変更車両の走行を支援する走行支援システムであって」「前記特定車線に車線変更する変更地点までの区間について、前記変更車両を走行させる目標速度のプロファイルを設定する予定設定部(121)と、 前記特定車線上の前記変更地点より手前側の観測地点にて前記特定車線を走行している走行車両の速度を検知する少なくとも一つの路側機(300)より、当該観測地点を通過した前記走行車両の速度情報を逐次取得する情報取得部(122)と、 前記情報取得部により新たな前記走行車両の前記速度情報が取得された場合に、この速度情報に基づいて、前記プロファイルに従って走行する前記変更車両が、新たな前記走行車両により前記変更地点での車線変更を妨げられると予測されるか否かを判断する予測判断部(123)と、 前記予測判断部により前記変更車両の車線変更が妨げられると予測された場合に、前記変更地点への到達時刻が変更されるように前記プロファイルを更新する予定更新部(126)と、を備える」ことが記載されている。
特許文献1の「走行支援システム」は、車線変更地点において変更車両の車線変更が妨げられないように変更車両の到達時刻を変更するように構成されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-21171号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1の「走行支援システム」では、例えば、車両変更地点に到達した変更車両の速度と走行車両の速度とが異なることがあるため、車両変更地点といった複数の道路が接続する接続地点を含む接続領域において、接続する一方の道路から流入した車両(変更車両)の状態と、接続された他方の道路を進行する移動障害物(走行車両)の状態とが相互に干渉してしまう場合がある、といった課題がある。
【0005】
本開示は、上記課題を解決するもので、複数の道路が接続する接続地点を含む接続領域において、接続する一方の道路から流入した車両と、接続された他方の道路を進行する移動障害物とが干渉しないようにする、ことを目的とする。
【課題を解決するための手段】
【0006】
本開示の速度計画装置は、
第1の道路が第2の道路に接続する接続地点を含む接続領域において前記第1の道路から前記接続領域に進行する前記第1の車両の速度を計画する速度計画装置であって、
前記第2の道路を進行する移動障害物の位置および速度を含む障害物状態を示す障害物情報を取得し、当該障害物情報を用いて前記接続地点における、前記移動障害物の予測到達時間、および、前記移動障害物の速度を含む障害物状態を示す障害物予測状態情報、を算出する障害物状態予測部と、
前記第1の道路における前記第1の車両の位置および速度を含む車両状態を示す車両情報、および、前記第1の車両の周辺環境を示す周辺環境情報を取得し、当該周辺環境情報、前記車両情報、および、前記障害物予測状態情報を用いて、前記第1の車両が前記接続地点に到達した場合において、前記移動障害物に干渉しない目標到達時間、および、前記移動障害物の状態に干渉しない目標速度を含む目標状態を示す目標状態情報、を算出する目標状態演算部と、
前記目標状態情報を用いて、前記接続領域における前記第1の車両の速度パターンを含む速度計画情報を算出する速度計画部と、
を備えた。
【発明の効果】
【0007】
本開示によれば、複数の道路の接続地点を含む接続領域において、接続する一方の道路から流入した車両と、接続された他方の道路を進行する移動障害物とが干渉しないようにすることができる、という効果を奏する。
【図面の簡単な説明】
【0008】
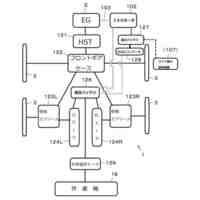
図1は、本開示の実施の形態1に係る速度計画装置の構成例を示す図である。
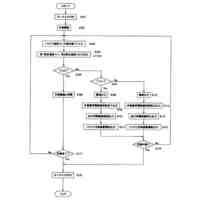
図2は、本開示の実施の形態1に係る速度計画装置の処理の一例を示すフローチャートである。
図3は、本開示の実施の形態1に係る速度計画装置の障害物状態予測処理における具体的な処理の一例を示すフローチャートである。
図4は、本開示の実施の形態1に係る速度計画装置の目標状態演算処理における具体的処理の一例を示すフローチャートである。
図5は、本開示の実施の形態1に係る速度計画装置の速度計画処理における具体的処理の一例を示すフローチャートである。
図6は、本開示の実施の形態1に係る速度計画装置を含む速度計画システムの構成の一例を説明する図である。
図7は、本開示の実施の形態1に係る速度計画装置を含む速度計画システムの処理の一例を示すフローチャートである。
図8は、本開示の実施の形態1に係る速度計画システムにおける車両制御部の処理の一例を示すフローチャートである。
図9は、本開示の実施の形態2に係る速度計画装置による処理が実行される具体的な場面の例を説明する図である。(合流路)
図10は、本開示の実施の形態2に係る速度計画装置を含む速度計画システムの構成の一例を説明する図である。
図11は、本開示の実施の形態2に係る速度計画装置の障害物状態予測処理における具体的な処理の一例を示すフローチャートである。
図12は、本開示の実施の形態2に係る速度計画装置の目標状態演算処理における具体的処理の一例を示すフローチャートである。
図13は、本開示の実施の形態2に係る速度計画装置の速度計画処理における具体的処理の一例を示すフローチャートである。
図14は、本開示の速度計画装置における座標変換処理後の座標イメージの第1例を示す図である。
図15は、本開示の速度計画装置における座標変換処理後の座標イメージの第2例を示す図である。
図16は、本開示の速度計画装置における障害物情報のノイズおよび誤差を除去する方法の一例を説明する図である。
図17は、合流開始地点から障害物までの距離の時系列データを示す図である。
図18は、障害物移動予測処理により得られる移動軌跡の第1の表現例(距離と時間との関係で表現)を説明するための図である。
図19は、障害物移動予測処理により得られる移動軌跡の第2の表現例(速度と時間との関係で表現)を説明するための図である。
図20は、障害物移動予測処理により得られる移動軌跡の第3の表現例(速度と距離との関係で表現)を説明するための図である。
図21は、到達可能範囲の例を説明するための図である。
図22は、到達可能範囲における最速予測軌道の例を説明するための図である。
図23は、到達可能範囲における最遅予測軌道の例を説明するための図である。
図24は、到達可能範囲における最遅予測軌道の別の例を説明するための図である。
図25は、第1の車両の前後に別の車両が存在する状況を示す図である。
図26は、図25の状況における到達可能範囲の例を説明するための図である。
図27は、目標状態を算出する方法の概念を説明するための第1の図である。
図28は、目標状態を算出する方法の概念を説明するための第2の図である。
図29は、目標状態を算出する方法の概念を説明するための第3の図である。
図30は、速度計画処理により計画される速度パターンの第1表現例を説明するための図である。
図31は、速度パターンの生成方法を説明するための第1の図である。
図32は、速度パターンの生成方法を説明するための第2の図である。
図33は、速度計画処理により計画される速度パターンの第2表現例を説明するための図である。
図34は、速度計画処理により計画される速度パターンの第3表現例を説明するための図である。
図35は、速度計画処理により計画される速度パターンの第4表現例を説明するための図である。
図36は、速度計画処理により計画される速度パターンの第5表現例を説明するための図である。
図37は、速度計画処理により計画される速度パターンの第6表現例を説明するための図である。
図38は、車両制御部による車両制御を説明するための図である。
図39は、本開示の実施の形態3に係る速度計画装置による処理が実行される具体的な場面の例を説明する図である。(交差点)
図40は、本開示の実施の形態3に係る速度計画装置の障害物状態予測処理における具体的な処理の一例を示すフローチャートである。
図41は、本開示の実施の形態3に係る速度計画装置の目標状態演算処理における具体的処理の一例を示すフローチャートである。
図42は、本開示の実施の形態3に係る速度計画装置の速度計画処理における具体的処理の一例を示すフローチャートである。
図43は、図39に示されるような場面において、目標状態を算出する方法の概念を説明するための図である。
図44は、本開示における速度計画装置の機能を実現するためのハードウェア構成の第1の例を示す図である。
図45は、本開示における速度計画装置の機能を実現するためのハードウェア構成の第2の例を示す図である。
【発明を実施するための形態】
【0009】
以下、本開示をより詳細に説明するために、本開示の実施の形態について、添付の図面に従って説明する。
【0010】
実施の形態1.
図1は、本開示の実施の形態1に係る速度計画装置200の構成例を示す図である。
速度計画装置200は、現在から未来の速度パターンを計画する。
速度計画装置200は、第1の道路が第2の道路に接続する接続地点を含む接続領域において第1の道路から接続領域に進行する第1の車両の速度を計画するものである。
接続地点は、例えば、第1の道路が第2の道路に合流する合流地点であり、接続領域は、例えば、合流地点を含む合流領域である。この場合、第1の道路は、合流路であり、第2の道路は、被合流路あるいは本線である。
接続地点は、例えば、第1の道路と第2の道路とが交差する交差点であり、接続領域は、例えば、交差地点を含む交差領域である。この場合、第1の道路と第2の道路とはそれぞれ交差路とも記載する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
設置部材
2か月前
個人
車両用エアー傘
23日前
個人
骨組み型熱交換器
3か月前
個人
車内雨傘載置収納具
2か月前
個人
自動車暴走抑制装置
3か月前
個人
自動車盗難防止装置
23日前
日本精機株式会社
表示装置
2か月前
井関農機株式会社
作業車両
2か月前
個人
荷台雨除け装置
1か月前
東レ株式会社
フロントグリル
3か月前
株式会社タイヨー産業
補助枕
2か月前
個人
キャンピングトレーラー
1か月前
日本精機株式会社
表示システム
2か月前
個人
全自動解除式シートベルト
1か月前
株式会社豊田自動織機
電動車両
1か月前
井関農機株式会社
作業車両
26日前
井関農機株式会社
作業車両
25日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
1か月前
井関農機株式会社
作業車両
25日前
井関農機株式会社
作業車両
1か月前
トヨタ自動車株式会社
車両
2か月前
個人
車両の座席装置
8日前
個人
セパレート型キャンピングカー
23日前
株式会社コーワ
フィルター清掃装置
1か月前
日本化薬株式会社
ガス発生器
1日前
個人
テーブル付きハンドルガード具
1か月前
株式会社クボタ
作業車
2か月前
個人
視認ペダル操作システム
1か月前
株式会社ニフコ
カップホルダ
2か月前
株式会社クボタ
作業車
2か月前
アピオ株式会社
荷物用支持具
4日前
株式会社コーワ
フィルター清掃装置
1か月前
豊田合成株式会社
乗員保護装置
1か月前
オムロン株式会社
表示システム
2か月前
ダイハツ工業株式会社
搬送装置
3か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ