TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024058526
公報種別
公開特許公報(A)
公開日
2024-04-25
出願番号
2022183405
出願日
2022-11-16
発明の名称
人型ロボットの制御システム及びプログラム
出願人
ソフトバンクグループ株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
B25J
13/08 20060101AFI20240418BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】作業性の低下を抑制することができる人型ロボットを提供する。
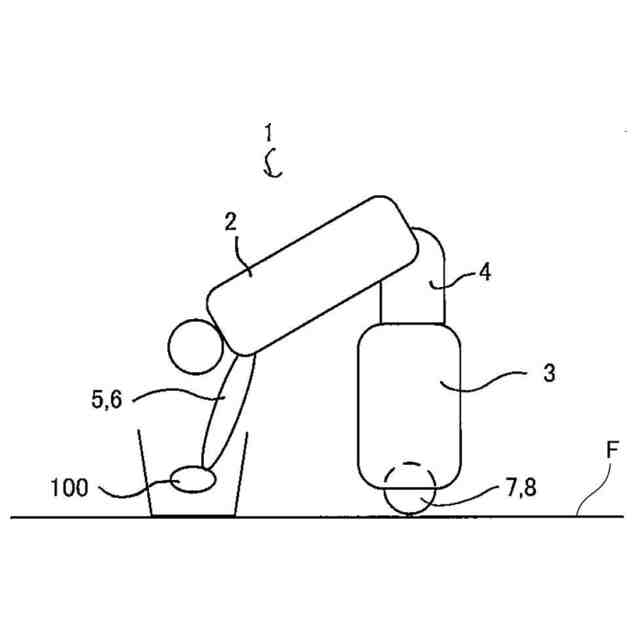
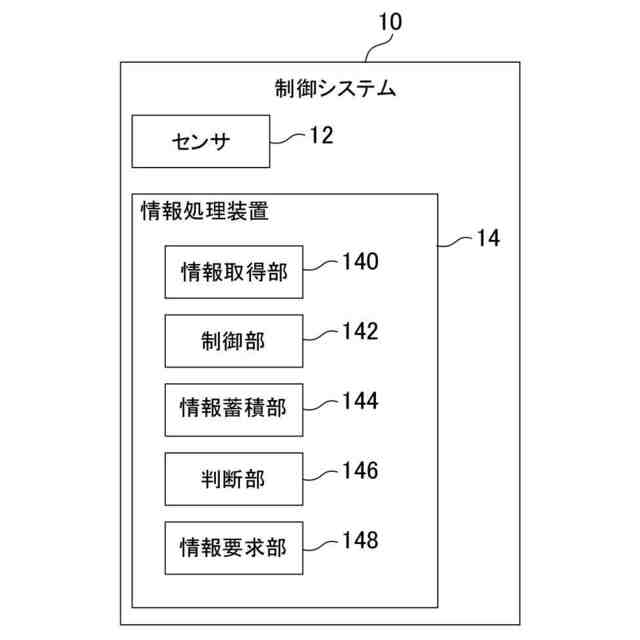
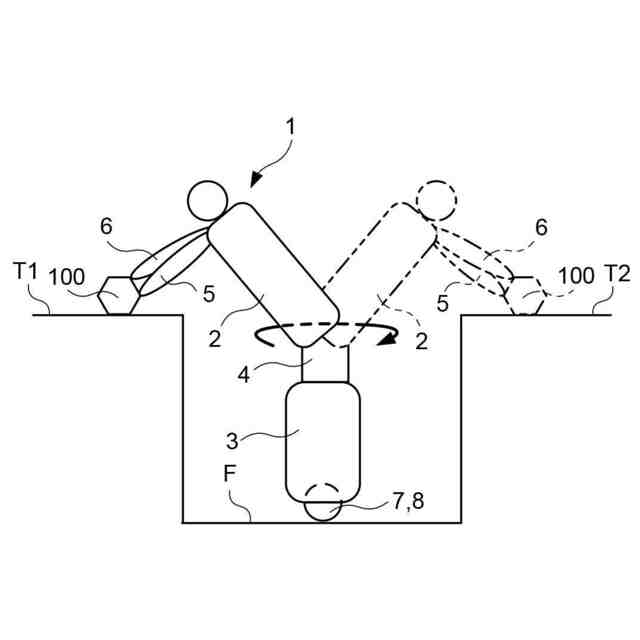
【解決手段】人型ロボットの制御システムは、少なくとも1つの腕部を有する上半身部と、床に置かれる脚部と、脚部に対して上半身部を回動可能に連結する連結部とを備えた人型ロボット、腕部と人型ロボットが作業しようとする物体との距離および角度を少なくとも表す情報を取得する情報取得部、並びに情報に基づいて連結部の回動を制御する制御部を備え、制御部は、人型ロボットの情報取得部が取得した情報、及び別の人型ロボットの情報取得部が取得した情報に基づいて、連結部の回動を制御する。
【選択図】図2
特許請求の範囲
【請求項1】
少なくとも1つの腕部を有する上半身部と、床に置かれる脚部と、前記脚部に対して前記上半身部を回動可能に連結する連結部とを備えた人型ロボット、
前記腕部と前記人型ロボットが作業しようとする物体との距離および角度を少なくとも表す情報を取得する情報取得部、並びに
前記情報に基づいて前記連結部の回動を制御する制御部を備え、
前記制御部は、前記人型ロボットの前記情報取得部が取得した前記情報、及び別の前記人型ロボットの前記情報取得部が取得した前記情報に基づいて、前記連結部の回動を制御する人型ロボットの制御システム。
続きを表示(約 530 文字)
【請求項2】
前記人型ロボットが、自身の前記情報取得部から正常な前記情報を取得不能であった場合、別の前記人型ロボットに対して、前記情報を要求する情報要求部を備える
請求項1に記載の制御システム。
【請求項3】
前記連結部は、さらに前記脚部と前記上半身部との距離を変更可能に前記脚部と前記上半身部とを連結する請求項1に記載の制御システム。
【請求項4】
前記連結部は、回動動作として前記脚部に対して前記上半身部を傾動可能に構成されている請求項1に記載の制御システム。
【請求項5】
前記連結部は、回動動作として前記脚部に対して前記上半身部を前記床の水平方向に回転可能に構成されている請求項1に記載の制御システム。
【請求項6】
前記脚部は、前記人型ロボットのバランスを維持するバランス機能を有する請求項1に記載の制御システム。
【請求項7】
前記脚部は、前記人型ロボットを移動可能な車輪部を備える請求項1に記載の制御システム。
【請求項8】
コンピュータを請求項1~7の何れか1項に記載の制御システムの制御部として機能させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、人型ロボットの制御システム及びプログラムに関する。
続きを表示(約 1,000 文字)
【背景技術】
【0002】
工場の生産ラインにおいては作業を自動で行うための人型ロボットが使用されている。特許文献1には、人型ロボットの姿勢制御について記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-093506号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、人型ロボットは、例えば、視界不良やセンサ異常等により、作業しようとする人型ロボットが作業しようとする物体の情報を取得できない場合がある。この場合、人型ロボットの作業性が低下する可能性がある。
【0005】
本開示は上記事情に鑑みなされたものであり、人型ロボットの作業性の低下を抑制することを目的とする。
【課題を解決するための手段】
【0006】
本開示による人型ロボットの制御システムは、
少なくとも1つの腕部を有する上半身部と、床に置かれる脚部と、前記脚部に対して前記上半身部を回動可能に連結する連結部とを備えた人型ロボット、
前記腕部と前記人型ロボットが作業しようとする物体との距離および角度を少なくとも表す情報を取得する情報取得部、並びに
前記情報に基づいて前記連結部の回動を制御する制御部を備え、
前記制御部は、前記人型ロボットの前記情報取得部が取得した前記情報、及び別の前記人型ロボットの前記情報取得部が取得した前記情報に基づいて、前記連結部の回動を制御する人型ロボットの制御システム。
【0007】
なお、本開示による人型ロボットの制御システムにおいては、人型ロボットが、自身の情報取得部から正常な情報を取得不能であった場合、別の人型ロボットに対して、情報を要求する情報要求部を備えてもよい。
【0008】
なお、本開示による人型ロボットの制御システムにおいては、連結部は、さらに脚部と上半身部との距離を変更可能に脚部と上半身部とを連結するものであってもよい。
【0009】
また、本開示による人型ロボットの制御システムにおいては、連結部は、回動動作として脚部に対して上半身部を傾動可能に構成されていてもよい。
【0010】
また、本開示による人型ロボットの制御システムにおいては、連結部は、回動動作として脚部に対して上半身部を床の水平方向に回転可能に構成されていてもよい。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
5か月前
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
26日前
UTM株式会社
搬送装置
5か月前
株式会社ツノダ
挟持工具
1か月前
株式会社ツノダ
挟持工具
2か月前
個人
ペットボトル用蓋開け具。
6か月前
川崎重工業株式会社
ハンド
2か月前
株式会社右川ゴム製造所
把持装置
1か月前
個人
ロボットシステム
4か月前
株式会社不二越
ロボット
4か月前
学校法人立命館
グリッパ
1か月前
学校法人立命館
ロボットハンド
2か月前
トヨタ自動車株式会社
関節機構
4か月前
トヨタ自動車株式会社
関節機構
5か月前
個人
作業台
5か月前
個人
プーリーキー抜き治具
1か月前
CKD株式会社
電動把持装置
5日前
株式会社不二越
予測システム
2か月前
東京都公立大学法人
ロボットハンド
今日
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
4か月前
株式会社ダイヘン
画像生成装置
1か月前
工機ホールディングス株式会社
作業機
4か月前
株式会社ダイヘン
情報処理装置
1か月前
小倉クラッチ株式会社
ロボットハンド
4か月前
株式会社ダイヘン
画像生成装置
1か月前
株式会社共和製作所
ロボット用アーム
13日前
株式会社越智工業所
ブレーカ用カバー
4か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社中村製作所
トルクドライバー
2か月前
工機ホールディングス株式会社
作業機
2か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ


































