TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024058163
公報種別
公開特許公報(A)
公開日
2024-04-25
出願番号
2022165337
出願日
2022-10-14
発明の名称
印刷方法、エンドエフェクター、及びロボットシステム
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
17/00 20060101AFI20240418BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】リニアステージのボールにフレッチングが発生し難い印刷方法、エンドエフェクター、及びロボットシステムを提供する。
【解決手段】印刷方法は、ピエゾ駆動するリニアステージ11を介してインクジェットヘッド15を備えるロボットアーム220を用いて、対象物に印刷を行う方法であって、インクジェットヘッド15からインクが吐出されていないときに、リニアステージ11がロボットアーム220に対して相対的に移動し、インクジェットヘッド15がインクを吐出しながら移動する方向に対して、リニアステージ11の移動する方向が直交している。
【選択図】図4
特許請求の範囲
【請求項1】
ピエゾ駆動するリニアステージを介してインクジェットヘッドを備えるロボットアームを用いて、対象物に印刷を行う方法であって、
前記インクジェットヘッドからインクが吐出されていないときに、前記リニアステージが前記ロボットアームに対して相対的に移動し、
前記インクジェットヘッドが前記インクを吐出しながら移動する方向に対して、前記リニアステージの前記移動する方向が直交している、
印刷方法。
続きを表示(約 600 文字)
【請求項2】
前記リニアステージの前記移動する距離は、前記リニアステージのボール外周1周以上、前記リニアステージの可動限界以下、である、
請求項1に記載の印刷方法。
【請求項3】
前記リニアステージの前記移動は、前記印刷の改行のときに行う、
請求項1に記載の印刷方法。
【請求項4】
前記リニアステージが前記移動して停止する位置は、移動開始時の位置より、ボール外周1周分以上離れている、
請求項1に記載の印刷方法。
【請求項5】
前記リニアステージの前記移動は、前記対象物の切り替わり時に行う、
請求項1に記載の印刷方法。
【請求項6】
ロボットアームに接続し、ピエゾ駆動するリニアステージと、
対象物に印刷を行うインクジェットヘッドと、を備え、
前記リニアステージは、前記インクジェットヘッドからインクが吐出されていないときに、前記ロボットアームに対して相対的に移動し、
前記インクジェットヘッドが前記インクを吐出しながら移動する方向に対して、前記リニアステージの前記移動する方向が直交している、
エンドエフェクター。
【請求項7】
ロボットアームと、
請求項6に記載のエンドエフェクターと、を備える、
ロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、印刷方法、エンドエフェクター、及びロボットシステムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
例えば、特許文献1にロボットのアーム部にインクジェット印刷ヘッドを装着し、対象物に印刷するロボットシステムが記載されている。このロボットシステムは、印刷軌道のずれをピエゾステージによりインクジェット印刷ヘッドを印刷方向と直交する方向に移動させることで補正している。
【先行技術文献】
【特許文献】
【0003】
特開2013-202781号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載のロボットシステムは、印刷方向のずれを補正する補正量が小さいため、ピエゾステージの移動量も小さい。そのため、ピエゾステージ内のリニアガイドのボールがフレッチングを起こしてしまい、補正精度が低下するという課題があった。
【課題を解決するための手段】
【0005】
印刷方法は、ピエゾ駆動するリニアステージを介してインクジェットヘッドを備えるロボットアームを用いて、対象物に印刷を行う方法であって、前記インクジェットヘッドからインクが吐出されていないときに、前記リニアステージが前記ロボットアームに対して相対的に移動し、前記インクジェットヘッドが前記インクを吐出しながら移動する方向に対して、前記リニアステージの前記移動する方向が直交している。
【0006】
エンドエフェクターは、ロボットアームに接続し、ピエゾ駆動するリニアステージと、対象物に印刷を行うインクジェットヘッドと、を備え、前記リニアステージは、前記インクジェットヘッドからインクが吐出されていないときに、前記ロボットアームに対して相対的に移動し、前記インクジェットヘッドが前記インクを吐出しながら移動する方向に対して、前記リニアステージの前記移動する方向が直交している。
【0007】
ロボットシステムは、ロボットアームと、上記に記載のエンドエフェクターと、を備える。
【図面の簡単な説明】
【0008】
第1実施形態に係るロボットシステムの全体構成を示す斜視図。
第1実施形態に係るエンドエフェクターの構成を示す斜視図。
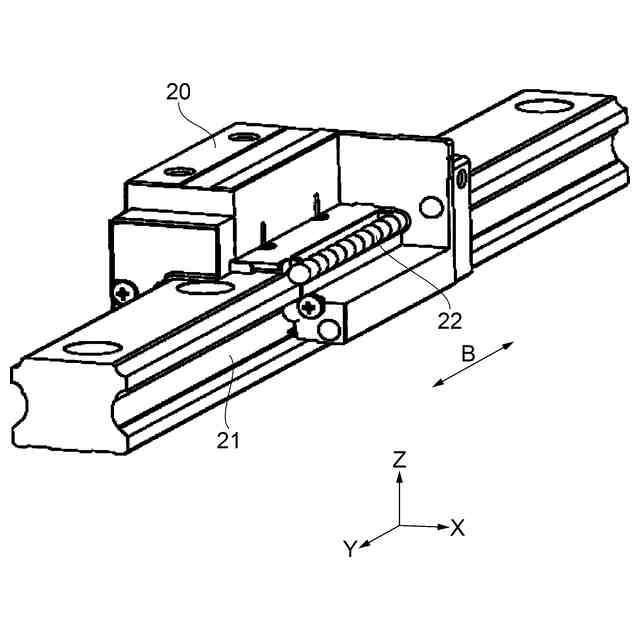
リニアガイドのキャリッジの内部構造を説明する斜視図。
第1実施形態に係る印刷方法を示すフローチャート図。
第2実施形態に係る印刷方法を示すフローチャート図。
【発明を実施するための形態】
【0009】
1.第1実施形態
先ず、第1実施形態に係るロボットシステム100について、図1~図3を参照して説明する。
尚、説明の便宜上、以降の図2及び図3には、互いに直交する3つの軸として、X軸、Y軸、及びZ軸を図示している。また、X軸に沿った方向を「X方向」、Y軸に沿った方向を「Y方向」、Z軸に沿った方向を「Z方向」と言う。また、各軸の矢印側を「プラス側」、矢印と反対側を「マイナス側」とも言う。また、Z方向プラス側を「上」、Z方向マイナス側を「下」とも言う。
【0010】
本実施形態のロボットシステム100は、図1に示すように、対象物に印刷を行うエンドエフェクター10と、エンドエフェクター10を保持し、エンドエフェクター10を印刷方向へ移動させるロボット200と、ロボット200の駆動を制御するロボット制御装置900と、を有する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
6か月前
個人
ねじ締め装置
5か月前
日東精工株式会社
搬送装置
1か月前
個人
ペットボトル用蓋開け具。
6か月前
株式会社ツノダ
挟持工具
1か月前
株式会社ツノダ
挟持工具
2か月前
UTM株式会社
搬送装置
5か月前
株式会社右川ゴム製造所
把持装置
1か月前
川崎重工業株式会社
ハンド
3か月前
個人
ロボットシステム
5か月前
株式会社不二越
ロボット
5か月前
トヨタ自動車株式会社
関節機構
5か月前
学校法人立命館
ロボットハンド
2か月前
トヨタ自動車株式会社
関節機構
5か月前
学校法人立命館
グリッパ
2か月前
個人
作業台
5か月前
個人
プーリーキー抜き治具
2か月前
CKD株式会社
電動把持装置
16日前
宮川工機株式会社
板状部品移動装置
1日前
株式会社不二越
予測システム
3か月前
東京都公立大学法人
ロボットハンド
11日前
株式会社越智工業所
ブレーカ用カバー
4か月前
小倉クラッチ株式会社
ロボットハンド
4か月前
個人
スロープバリビス-ビス&-ドライバー
9日前
株式会社ダイヘン
画像生成装置
1か月前
株式会社ダイヘン
情報処理装置
1か月前
株式会社ダイヘン
画像生成装置
1か月前
国立大学法人東北大学
剛性可変連結体
5か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
5か月前
工機ホールディングス株式会社
作業機
5か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
3か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ


































