TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024057629
公報種別
公開特許公報(A)
公開日
2024-04-25
出願番号
2022164385
出願日
2022-10-13
発明の名称
ロボット制御情報生成装置、ロボット制御装置及びロボット制御情報生成方法
出願人
アズビル株式会社
代理人
弁理士法人山王内外特許事務所
主分類
B25J
15/08 20060101AFI20240418BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットハンドにワークを把持させる際のモータの駆動力を取得する。
【解決手段】ロボット制御情報生成装置は、モータの駆動力によって開閉するロボットハンドに把持させるワークの大きさに関する情報を取得するワーク情報取得部と、ロボットハンドにワークを把持させた際のロボットハンドの把持力を示す情報を取得する把持力取得部と、ワーク情報取得部が取得した情報及び把持力取得部が取得した情報に基づいて、モータに発生させる駆動力を示す情報を取得する駆動力取得部と、を備えた。
【選択図】図1
特許請求の範囲
【請求項1】
モータの駆動力によって開閉するロボットハンドに把持させるワークの大きさに関する情報を取得するワーク情報取得部と、
前記ロボットハンドに前記ワークを把持させた際の前記ロボットハンドの把持力を示す情報を取得する把持力取得部と、
前記ワーク情報取得部が取得した情報及び前記把持力取得部が取得した情報に基づいて、前記モータに発生させる駆動力を示す情報を取得する駆動力取得部と、を備えた
ことを特徴とするロボット制御情報生成装置。
続きを表示(約 1,100 文字)
【請求項2】
前記ロボットハンドに前記ワークを把持させる際の把持時間に関する情報を取得する把持時間取得部と、
前記駆動力取得部が取得した情報及び前記把持時間取得部が取得した情報に基づいて、前記モータに起因する発熱量に関する情報を取得する発熱量取得部と、を備えた
ことを特徴とする請求項1記載のロボット制御情報生成装置。
【請求項3】
前記駆動力取得部が取得した駆動力を示す情報を表示する表示部を備えた
ことを特徴とする請求項1記載のロボット制御情報生成装置。
【請求項4】
前記発熱量取得部が取得した発熱量に関する情報を表示する表示部を備えた
ことを特徴とする請求項2記載のロボット制御情報生成装置。
【請求項5】
前記駆動力取得部が取得した駆動力が予め設定されている閾値を超えた場合に報知を行う報知部を備えた
ことを特徴とする請求項1記載のロボット制御情報生成装置。
【請求項6】
前記発熱量取得部が取得した駆動力が予め設定されている閾値を超えた場合に報知を行う報知部を備えた
ことを特徴とする請求項2記載のロボット制御情報生成装置。
【請求項7】
前記駆動力取得部が取得した駆動力が予め設定されている閾値を超えなかった場合に、前記ロボットハンドによる前記ワークの把持を許容し、前記駆動力取得部が取得した駆動力が予め設定されている閾値を超えた場合に、前記ロボットハンドによる前記ワークの把持を制限する制限部を備えた
ことを特徴とする請求項1記載のロボット制御情報生成装置。
【請求項8】
請求項1乃至7のいずれか1項記載のロボット制御情報生成装置と、
前記駆動力取得部が取得した情報に基づいて、前記モータを駆動する駆動電流を出力するモータ制御部と、を備えた
ことを特徴とするロボット制御装置。
【請求項9】
ワーク情報取得部と、把持力取得部と、駆動力取得部と、を備えた装置が行うロボット制御情報生成方法であって、
前記ワーク情報取得部が、モータの駆動力によって開閉するロボットハンドに把持させるワークの大きさに関する情報を取得するステップと、
前記把持力取得部が、前記ロボットハンドに前記ワークを把持させた際の前記ロボットハンドの把持力を示す情報を取得するステップと、
前記駆動力取得部が、前記ワーク情報取得部が取得した情報及び前記把持力取得部が取得した情報に基づいて、前記モータに発生させる駆動力を示す情報を取得するステップと、を備えた
ことを特徴とするロボット制御情報生成方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボット制御情報生成装置、ロボット制御装置及びロボット制御情報生成方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、4節のリンク機構と変位センサとを用いたロボットハンドが開示されている(特許文献1参照)。このロボットハンドは、変位センサによる検出結果から把持力を検出し、ロボットハンドがワークを適切な把持力で把持できるように把持力の制御を可能にしている。
【先行技術文献】
【特許文献】
【0003】
特開2020-019110号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
一般に、ロボットハンドを駆動するモータが発揮する駆動力には、モータの構造に起因する上限があり、ロボットハンドにワークを把持させる際のモータに要求される駆動力が、当該モータの上限の駆動力を超えていた場合、ロボットハンドはワークを適切な把持力で把持できない。従って、所定の把持力でロボットハンドにワークを把持させる際、モータに要求される駆動力が上限の駆動力を超えていないことを確認するために、ロボットハンドのモータの駆動力を取得することが求められる。
【0005】
本開示は、上記課題を解決するものであって、ロボットハンドにワークを把持させる際のモータの駆動力を取得することができるロボットハンド制御情報生成装置、ロボットハンド制御装置及びロボットハンド制御情報生成方法を提供することを目的としている。
【課題を解決するための手段】
【0006】
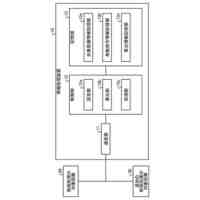
本開示に係るロボット制御装置は、モータの駆動力によって開閉するロボットハンドに把持させるワークの大きさに関する情報を取得するワーク情報取得部と、ロボットハンドにワークを把持させた際のロボットハンドの把持力を示す情報を取得する把持力取得部と、ワーク情報取得部が取得した情報及び把持力取得部が取得した情報に基づいて、モータに発生させる駆動力を示す情報を取得する駆動力取得部と、を備えたことを特徴とする。
【発明の効果】
【0007】
本開示によれば、上記のように構成したので、ロボットハンドにワークを把持させる際のモータの駆動力を取得することができる。
【図面の簡単な説明】
【0008】
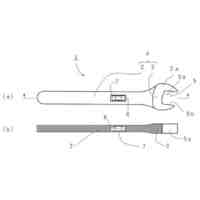
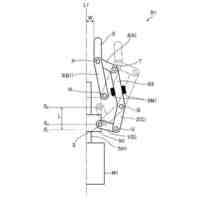
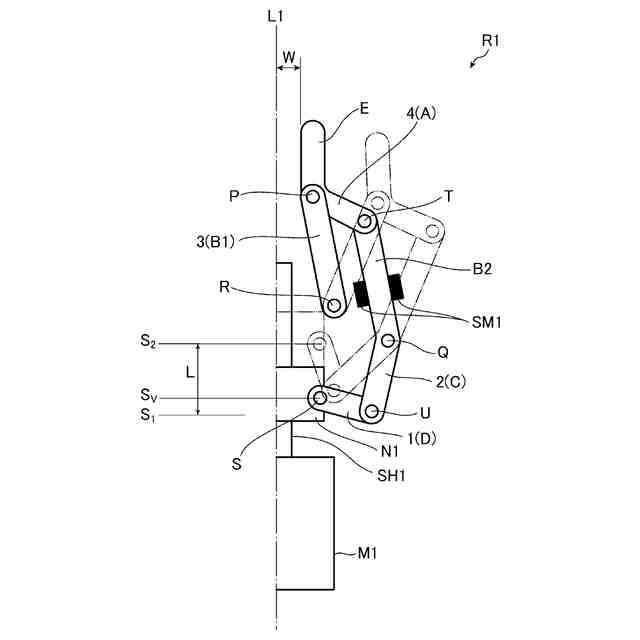
実施の形態1に係るロボットハンドの概略構成を示す正面図。
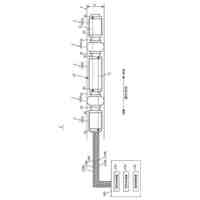
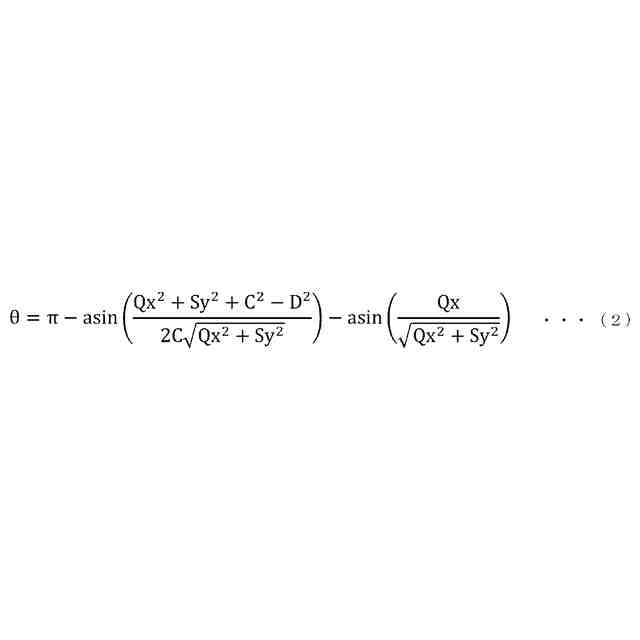
実施の形態1に係るロボットハンドの幾何学モデルを示す図。
実施の形態1に係るロボット制御装置の概略構成を示すブロック図。
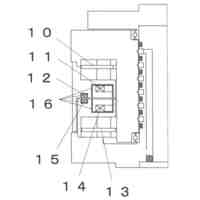
実施の形態1に係る制御部のハードウェア構成の例を示す図。
実施の形態1に係る制御部のハードウェア構成の例を示す図。
実施の形態1に係る制御部が行う処理を示すフローチャート。
【発明を実施するための形態】
【0009】
[本開示の原理]
例えば特許文献1に開示されたリンク機構と変位センサ(モーメントセンサ)を用いたロボットハンドを想定し、ステッピングモータを適用する場合、ステッピングモータ特有の脱調の問題を解決する必要がある。特に多品種のワークを把持することを前提とすると、脱調の問題もケースバイケースになり、一律の把持力で多品種のワークに対応することは困難である。
そこで発明者は、リンク機構の特徴である把持力の正確性に着眼し、目標とする把持力とステッピングモータに必要十分な電流値の関係を予め求め、その電流値でロボットハンドを把持動作させることに想到した。
より具体的には、把持力と把持開度(ワークの大きさ)を指定し、必要な電流値を求めるための算出式は、変位センサ(モーメントセンサ)を取り付けた状態で実際に実験を行なって得られるデータから回帰的に求めてもよいし、平面リンク機構の機構解析から演繹的に求めてもよい。その上で、脱調に至るトルク上限も予め特定し、目標とする把持力を得るために必要なトルクの推定値が算出されたときに、そのトルクの推定値がトルク上限を超える場合は、脱調の可能性を報知する信号を出力するなどの対応を行なえばよい。
【0010】
[実施の形態]
以下、本開示に係る実施の形態について図面を参照しながら詳細に説明する。
実施の形態1.
まず、図1を参照して、実施の形態1に係るロボットハンドR1の概略構成について説明する。図1は、実施の形態1に係るロボットハンドR1の概略構成を示す正面図である。なお、ロボットハンドR1は、図1に示す中心線L1に対して左右が線対称となるように構成されているため、中心線L1に対する一方のみ図示し、他方の図示を省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
アズビル株式会社
情報処理装置、情報処理方法および情報処理プログラム
7日前
アズビル株式会社
情報処理装置、情報処理方法、及び情報処理プログラム
9日前
アズビル株式会社
ロボット制御情報生成装置、ロボット制御装置及びロボット制御情報生成方法
14日前
個人
釘抜き機
5か月前
個人
ねじ締め装置
4か月前
株式会社フジキン
レンチ
7か月前
日東精工株式会社
搬送装置
28日前
株式会社ツノダ
挟持工具
1か月前
UTM株式会社
搬送装置
5か月前
個人
ペットボトル用蓋開け具。
6か月前
株式会社ツノダ
挟持工具
2か月前
川崎重工業株式会社
ハンド
2か月前
株式会社右川ゴム製造所
把持装置
1か月前
個人
ロボットシステム
4か月前
学校法人立命館
グリッパ
1か月前
株式会社不二越
ロボット
4か月前
株式会社不二越
ロボット
6か月前
トヨタ自動車株式会社
関節機構
5か月前
学校法人立命館
ロボットハンド
2か月前
トヨタ自動車株式会社
関節機構
4か月前
個人
作業台
5か月前
オムロン株式会社
ロボットハンド
6か月前
個人
プーリーキー抜き治具
1か月前
株式会社近藤製作所
ロータリージョイント
7か月前
株式会社不二越
予測システム
2か月前
川崎重工業株式会社
ロボット
6か月前
CKD株式会社
電動把持装置
7日前
東京都公立大学法人
ロボットハンド
2日前
工機ホールディングス株式会社
作業機
4か月前
学校法人 中央大学
管内移動ロボット
7か月前
国立大学法人東北大学
剛性可変連結体
5か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
4か月前
株式会社ダイヘン
画像生成装置
1か月前
小倉クラッチ株式会社
ロボットハンド
4か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ