TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024056366
公報種別
公開特許公報(A)
公開日
2024-04-23
出願番号
2022163188
出願日
2022-10-11
発明の名称
情報処理装置、情報処理方法、及びコンピュータプログラム
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G08G
1/16 20060101AFI20240416BHJP(信号)
要約
【課題】移動体の運行の効率を向上可能な情報処理装置を提供する。
【解決手段】
上記課題を解決するために、本発明にかかる情報処理装置は、移動体が通過する通過領域を算出し、算出した前記通過領域に基づいて、センサによって前記移動体の周辺の物体を検知する際の、前記物体を検知するための物体検知範囲を設定する。
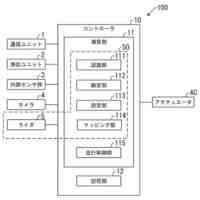
【選択図】 図2
特許請求の範囲
【請求項1】
移動体が通過する通過領域を算出する通過領域算出手段と、
センサによって前記移動体の周辺の物体を検知する物体検知手段と、
前記通過領域算出手段で算出した前記通過領域に基づいて前記物体検知手段で前記物体を検知する物体検知範囲を設定する物体検知範囲設定手段と、を有することを特徴とする情報処理装置。
続きを表示(約 1,100 文字)
【請求項2】
前記通過領域は、前記移動体に接続されて移動する連結物又は前記移動体に積載されている積載物が通過する領域を含むことを特徴とする請求項1に記載の情報処理装置。
【請求項3】
前記物体検知範囲設定手段は、少なくとも前記通過領域算出手段で算出した前記通過領域を前記物体検知範囲として含むように設定することを特徴とする請求項1に記載の情報処理装置。
【請求項4】
前記物体検知範囲設定手段は、少なくとも前記通過領域算出手段で算出した前記通過領域を前記物体検知範囲が含むように前記センサのパラメータ又は前記物体検知手段のパラメータの少なくとも一方を変更することを特徴とする請求項3に記載の情報処理装置。
【請求項5】
前記通過領域算出手段は前記移動体の制動性能、走行中の速度及び経路に基づいて前記通過領域を算出することを特徴とする請求項3に記載の情報処理装置。
【請求項6】
第1のセンサによって移動体の周辺の物体を検知する第1の物体検知手段と、
第2のセンサによって前記移動体の周辺の物体を検知する第2の物体検知手段と、
前記第1の物体検知手段で検知した前記物体の特徴に基づいて前記物体を特定する物体特定手段と、
前記物体特定手段で特定した前記物体の動作範囲を推定する物体動作範囲推定手段と、
前記物体特定手段で特定した前記物体と前記物体動作範囲推定手段で推定した前記動作範囲に基づいて前記第2の物体検知手段で物体を検知する物体検知範囲を設定する物体検知範囲設定手段と、を有することを特徴とする情報処理装置。
【請求項7】
前記物体検知範囲設定手段は、前記物体特定手段で特定した前記物体と前記移動体との位置関係に基づいて前記物体検知範囲を設定することを特徴とする請求項6に記載の情報処理装置。
【請求項8】
前記物体検知範囲設定手段は、前記移動体の停止距離に基づいて前記物体検知範囲を設定することを特徴とする請求項1に記載の情報処理装置。
【請求項9】
前記物体検知範囲で検知された前記物体の検知結果に基づき表示又は前記移動体の駆動制御を行うことを特徴とする請求項1に記載の情報処理装置。
【請求項10】
移動体が通過する通過領域を算出する通過領域算出ステップと、
センサによって前記移動体の周辺の物体を検知する物体検知ステップと、
前記通過領域算出ステップで算出した前記通過領域に基づいて前記物体検知ステップで前記物体を検知する物体検知範囲を設定する物体検知範囲設定ステップと、を有することを特徴とする情報処理方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体の周辺の物体を検知する情報処理装置、情報処理方法、及びコンピュータプログラムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
自律移動ロボットなどの移動体は、走行するときに障害となる物体をカメラやレーザースキャナやLiDAR(Light Detection And Ranging)などのセンサを用いて検出し、検出した場合は迂回や停止などの衝突回避制御を行う。検出範囲を広げるほど移動体の周辺に存在する物体を早く検知できるが、検知の度に移動体の衝突回避処理が行われ、目的地への到達が遅れてしまう場合がある。
【0003】
特許文献1では、移動体の進行方向にある物体の有無を判断し、移動体の走行の妨げとならない物体の検出を抑える技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
特許第6677516号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1の構成では、実際には通過しない領域に存在する障害物を検知してしまう場合がある。その結果、移動体の衝突回避処理により目的地への到着に遅れが発生し、移動体の運行の効率が下がる課題がある。
【0006】
本発明は上記問題に鑑みてなされたものであり、移動体の運行の効率を向上可能な情報処理装置を提供することを目的としている。
【課題を解決するための手段】
【0007】
情報処理装置において、
移動体が通過する通過領域を算出する通過領域算出手段と、
センサによって前記移動体の周辺の物体を検知する物体検知手段と、
前記通過領域算出手段で算出した前記通過領域に基づいて前記物体検知手段で前記物体を検知する物体検知範囲を設定する物体検知範囲設定手段と、を有することを特徴とする。
【発明の効果】
【0008】
本発明によれば、移動体の運行の効率を向上可能な情報処理装置を実現できる。
【図面の簡単な説明】
【0009】
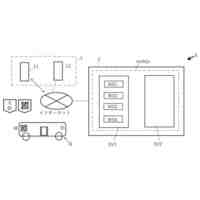
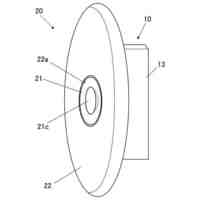
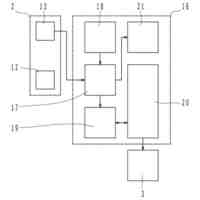
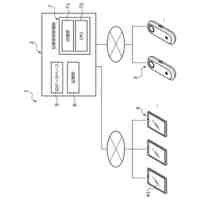
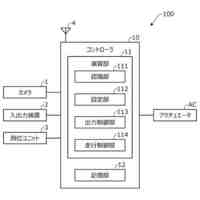
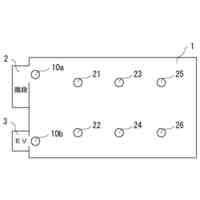
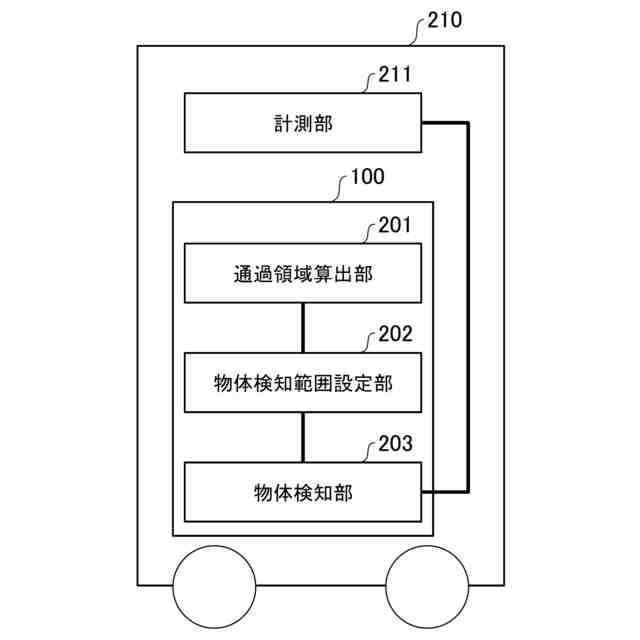
実施形態1に係る情報処理装置の内部構成を示す図である。
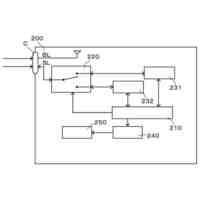
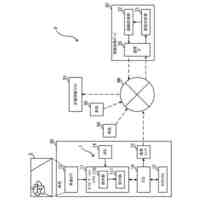
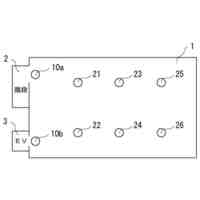
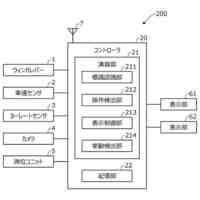
実施形態1に係る情報処理装置100を搭載した移動体の機能ブロック図である。
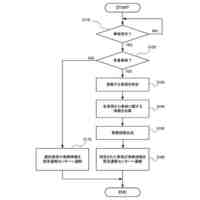
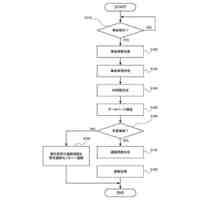
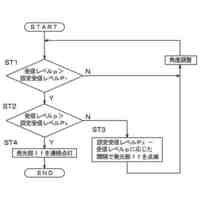
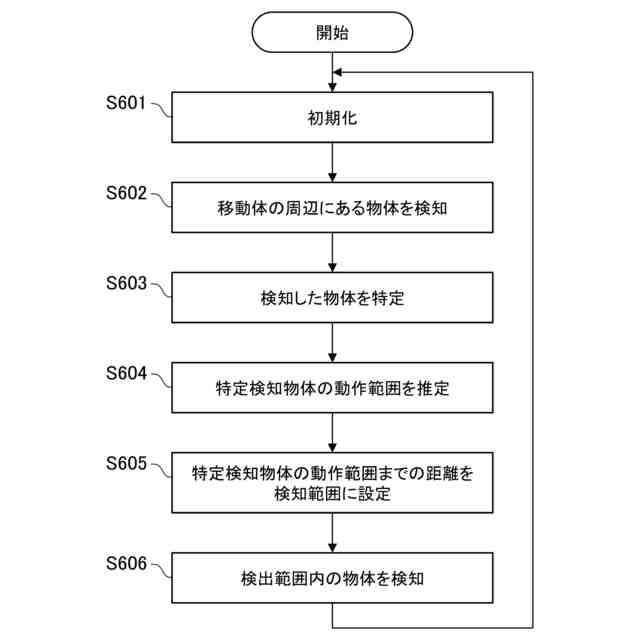
実施形態1に係る情報処理装置の動作フローチャートである。
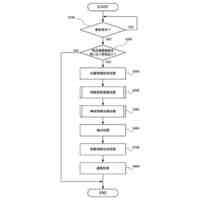
図3のステップS304の詳細を説明するフローチャートである。
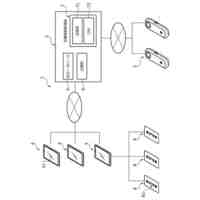
実施形態2に係る情報処理装置の機能ブロック図である。
実施形態2に係る情報処理装置の動作フローチャートである。
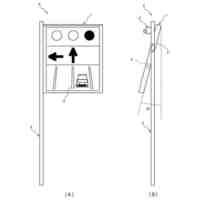
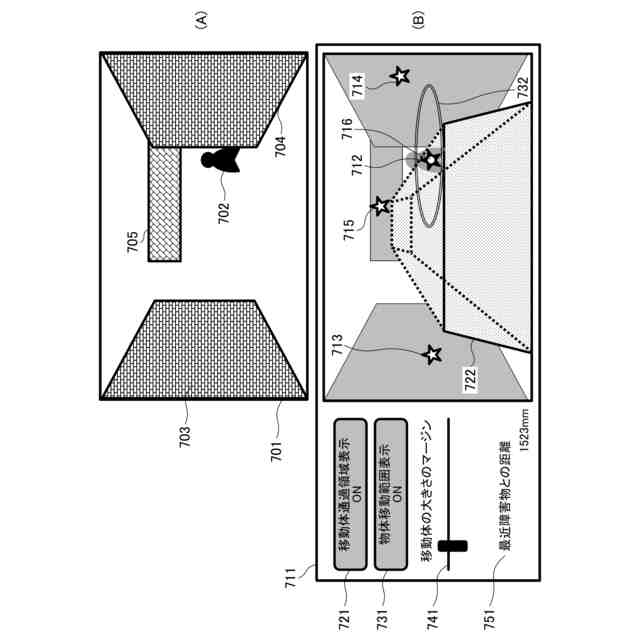
(A)、(B)は、実施形態5に係る表示例を示す図である。
【発明を実施するための形態】
【0010】
以下、図面を参照して本発明の実施形態を説明する。ただし、本発明は以下の実施形態に限定されるものではない。なお、各図において、同一の部材または要素については同一の参照番号を付し、重複する説明は省略または簡略化する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
見てるよ~!
2か月前
個人
はしごの道路標示
2か月前
個人
非常放送システム
9日前
個人
飛行体衝突回避装置
1か月前
個人
自動操舵制御システム
1か月前
個人
バス送迎支援システム
29日前
株式会社SUBARU
車両
1か月前
株式会社SUBARU
車両
1か月前
日本精機株式会社
車両用計器装置
1か月前
株式会社知財事業研究所
信号機
1か月前
ニッタン株式会社
表示灯
2か月前
ニッタン株式会社
発信機
2か月前
株式会社SUBARU
サーバ装置
1か月前
能美防災株式会社
警報器
1か月前
能美防災株式会社
表示灯
25日前
株式会社アガタ
閉空間監視装置
26日前
トヨタ自動車株式会社
制御装置
3日前
ニッタン株式会社
感度試験装置
25日前
個人
配車システム
1か月前
個人
配車システム
1か月前
ホーチキ株式会社
煙感知器
1か月前
ニッタン株式会社
表示灯付発信機
1か月前
株式会社京三製作所
車両検出装置
10日前
株式会社大林組
異常検知システム
1か月前
トヨタ自動車株式会社
情報収集システム
19日前
本田技研工業株式会社
運転支援装置
1か月前
竹中エンジニアリング株式会社
緊急呼出システム
1か月前
個人
駐車場概要又は道路概況提供システム
2か月前
井関農機株式会社
トラクタの制御システム
1か月前
ユニット株式会社
人感センサー音声警報器
25日前
本田技研工業株式会社
車両表示装置
1か月前
竹中エンジニアリング株式会社
緊急呼出システム
1か月前
日本信号株式会社
路上車両検知装置
1か月前
トヨタ自動車株式会社
運転支援装置
23日前
本田技研工業株式会社
外界認識装置
1か月前
矢崎エナジーシステム株式会社
警報器
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ