TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024055735
公報種別
公開特許公報(A)
公開日
2024-04-18
出願番号
2023048651
出願日
2023-03-24
発明の名称
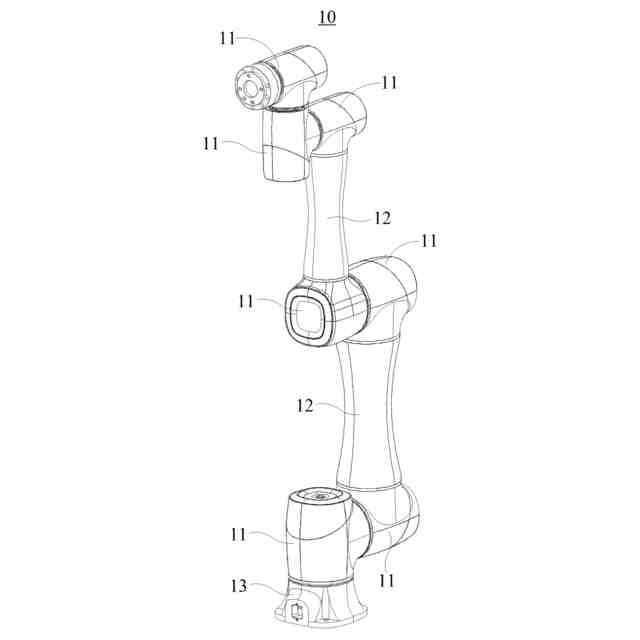
協働ロボットアーム及びその関節モジュール
出願人
深せん市越疆科技股ふん有限公司
,
SHENZHEN YUEJIANG TECHNOLOGY CO.,LTD.
代理人
TRY国際弁理士法人
主分類
B25J
17/00 20060101AFI20240411BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】エンコーダのキャリブレーション回数を減らす。
【解決手段】マルチコイルアブソリュートエンコーダは、ベース、軸受、回転軸、エンコードディスク及び回路基板を含む。前記エンコードディスクは、回転軸及び軸受を通じてベースと回動可能に接続される。前記回路基板は、前記ベースと固定的に接続される。前記回路基板における読取ヘッドとエンコードディスクは、キャリブレーションを行われた後、互いに協力して対応する検出を行うため、前記マルチコイルアブソリュートエンコーダは一体式構造を構成し、取り外しや取り付けが容易になる。前記ベースと前記回転軸は、それぞれ前記関節ハウジングと前記出力軸と取り外し可能に連接されている。
【選択図】図16
特許請求の範囲
【請求項1】
協働ロボットアームに用いられる関節モジュールであって、
前記関節モジュールは、関節ハウジングと、駆動アセンブリと、マルチコイルアブソリュートエンコーダとを備え、
前記駆動アセンブリは、出力軸と、前記関節ハウジング内に嵌設されたステータと、前記出力軸の外周を包むように設けられ且つ前記ステータの内側に位置するロータとを含み、
前記関節モジュールは、前記マルチコイルアブソリュートエンコーダのみにより前記出力軸の角位置を検出し、且つ前記出力軸の回転数を記録し、
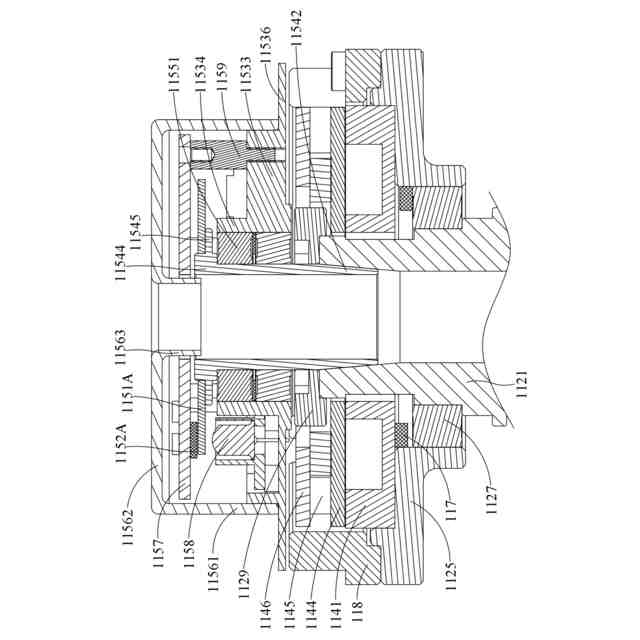
前記マルチコイルアブソリュートエンコーダは、軸受孔が形成され且つ前記関節ハウジングと取り外し可能に連接されるベースと、前記ベースの軸受孔内に嵌設される軸受と、回転軸と、エンコードディスクと、回路基板とを含み、
前記回転軸は、前記軸受の内輪に嵌設される接続部と、前記接続部の一端に接続され且つ前記軸受の一方側から延出する挿脱部と、前記接続部の他端に接続され且つ前記軸受の他方側から延出する外延部とを含み、
前記回転軸は、前記挿脱部を介して前記駆動アセンブリの出力軸と着脱可能に接続され、
前記エンコードディスクは、前記外延部と連接され、
前記回路基板は、前記ベースと連接され、且つ読取ヘッドが設けられており、
前記読取ヘッドは、前記エンコードディスクと協力して前記出力軸の角位置を検出することを特徴とする協働ロボットアームに用いられる関節モジュール。
続きを表示(約 2,300 文字)
【請求項2】
前記マルチコイルアブソリュートエンコーダは、磁気電気式に設置され、前記エンコードディスクは、磁気グリッドディスクに設置され、前記回路基板は、前記ベースの前記エンコードディスクに向かう側に固定され、前記マルチコイルアブソリュートエンコーダは、光電式に設置され、前記エンコードディスクは、ラスタディスクに設置され、
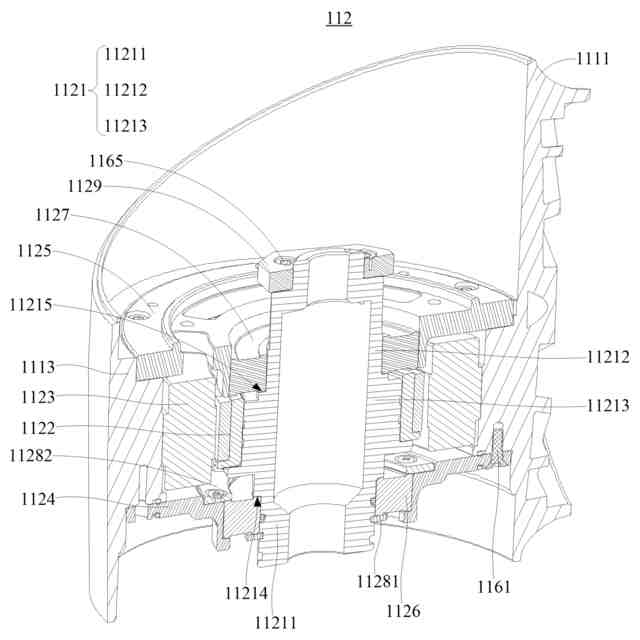
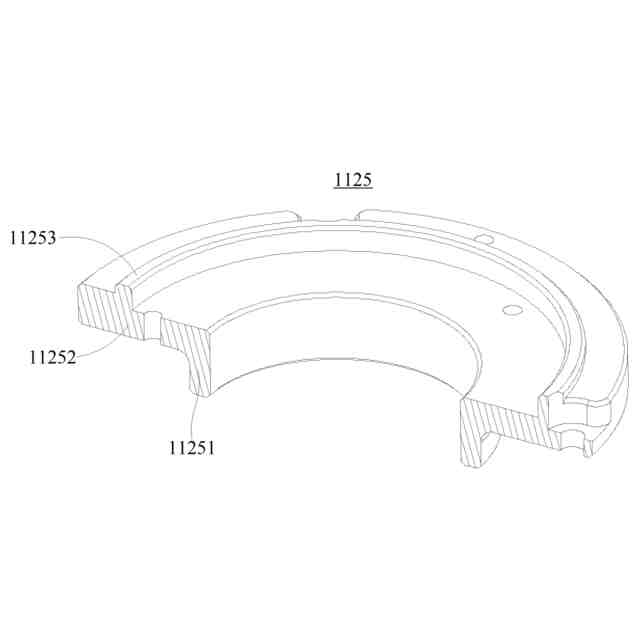
前記ベースは、外段差部と、前記外段差部に連接される内段差部とを含み、
前記内段差部は、前記回転軸の径方向において前記外段差部よりも前記回転軸に近く、前記内段差部の前記回転軸の軸方向における厚さは、前記外段差部の前記回転軸の軸方向における厚さよりも大きく、
前記軸受孔は、前記内段差部に設けられ、
前記マルチコイルアブソリュートエンコーダは、前記ベースに接続された上部カバーを含み、
前記上部カバーは、外筒状側壁と、前記外筒状側壁の一端に接続されるトップカバーとを含み、前記外筒状側壁は、前記外段差部で支持されていることを特徴とする請求項1に記載の協働ロボットアームに用いられる関節モジュール。
【請求項3】
前記ベースは、前記内段差部と前記外段差部とを連結する中間段差部を含み、
前記中間段差部は、前記回転軸の径方向において前記内段差部と前記外段差部との間に位置し、
前記中間段差部の前記回転軸の軸方向における厚さは、前記内段差部の前記回転軸の軸方向における厚さと前記外段差部の前記回転軸の軸方向における厚さとの間に位置し、
前記エンコードディスクは、前記回転軸の軸方向に沿って前記ベースに正投影される時に前記中間段差部と部分的に重なり、
前記エンコードディスクと前記中間段差部との前記回転軸の軸方向における間隔は、前記エンコードディスクと前記内段差部との前記回転軸の軸方向における間隔よりも大きいことを特徴とする請求項2に記載の協働ロボットアームに用いられる関節モジュール。
【請求項4】
前記マルチコイルアブソリュートエンコーダは、前記中間段差部に設けられる光源を含み、
前記回路基板は、前記回転軸の軸方向において前記エンコードディスクと前記トップカバーとの間に位置し、
前記光源は、前記エンコードディスクに検出信号を送信するために用いられ、
前記読取ヘッドは、前記エンコードディスクを通過する検出信号を受信するために用いられることを特徴とする請求項3に記載の協働ロボットアームに用いられる関節モジュール。
【請求項5】
前記回転軸の径方向における前記回路基板の外径は、前記回転軸の径方向における前記エンコードディスクの外径よりも大きく、
前記マルチコイルアブソリュートエンコーダは、前記回転軸の周りで間隔をあけて設けられる複数の支持柱を含み、前記支持柱は、前記中間段差部と前記回路基板との間に支持され、且つ前記エンコードディスクの周辺に位置することを特徴とする請求項4に記載の協働ロボットアームに用いられる関節モジュール。
【請求項6】
前記外延部は、前記軸受孔を完全に覆うように、前記回転軸の軸方向に沿って前記ベースに正投影された時に前記内段差部と部分的に重なることを特徴とする請求項2に記載の協働ロボットアームに用いられる関節モジュール。
【請求項7】
前記外延部は、前記接続部に接続され且つ前記接続部を取り囲む第1の外延セグメントと、前記第1の外延セグメントと連接され且つ前記第1の外延セグメントを取り囲む第2の外延セグメントとを含み、
前記第1の外延セグメントは、前記回転軸の軸方向に沿って前記軸受の内輪を圧持し、且つ前記回転軸の軸方向に沿って前記ベースに正投影される時に前記軸受孔内に落下し、
前記第2の外延セグメント、前記軸受の外輪及び前記ベースは、前記回転軸の軸方向において間隔を置いて設けられ、
前記第2の外延セグメントは、前記回転軸の軸方向に沿って前記ベースに正投影される時に前記内段差部と部分的にオーバラップし、
前記第2の外延セグメントの前記回転軸の軸方向における厚さは、前記第1の外延セグメントの前記回転軸の軸方向における厚さよりも小さく、前記エンコードディスクは、前記第2の外延セグメントの前記軸受から離反する側に接続されていることを特徴とする請求項6に記載の協働ロボットアームに用いられる関節モジュール。
【請求項8】
前記回転軸は、中空構造に成形され、前記上部カバーは、前記トップカバーに接続される内筒状側壁を含み、前記内筒状側壁は、前記外筒状側壁と前記トップカバーの同側に向かって同方向に延び、前記内筒状側壁は、前記回転軸の軸方向に沿って前記回転軸の内部に部分的に挿入されることを特徴とする請求項2に記載の協働ロボットアームに用いられる関節モジュール。
【請求項9】
前記内筒状側壁と前記回転軸は、前記回転軸の径方向における隙間が0.1mm~1mmであることを特徴とする請求項8に記載の協働ロボットアームに用いられる関節モジュール。
【請求項10】
前記内筒状側壁は、前記回転軸の軸方向において前記回転軸を挿入する深さが1mm~3mmであることを特徴とする請求項8に記載の協働ロボットアームに用いられる関節モジュール。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本願は、ロボットアームの技術分野に関し、具体的には、協働ロボットアーム及びその関節モジュールに関するものである。
続きを表示(約 3,700 文字)
【背景技術】
【0002】
科学技術の絶えなる発展に伴い、自動化の程度を高め人的コストを削減するために、生産製造にはロボットアームで単調で反復性が高く危険性が高い作業を取って代わる必要があるだけでなく、より難度が高くより複雑でより精度の高い特殊な任務を共同で達成するために、ロボットアームとオペレータによるマンマシン連携を必要とする。そのため、伝統的な産業用アームは、安全性がより良く人間と機械の協力性がより良い協働ロボットアームへと次第に進化してきた。次に、協働ロボットアームの発展について詳細に説明する。
【0003】
協働ロボットアームはデンマークのユニバーサルロボット(Universal Robots)会社が2005年に提案したもので、同社の協働ロボットアームはモータの出力軸と減速機の出力軸にいずれもエンコーダを設けており、即ちデュアルエンコーダスキームを採用し、デュアルエンコーダスキームはいずれかのエンコーダの読み取り不正確又は故障を検証することができる。デュアルエンコーダスキームに基づいて、協働ロボットアームの複数の安全機能を定義するためにも使用することができ、例えば、特許番号(CN106061688B、JP2010228028A、GB11291.1-2011、US20120286629A1、CN100380259C、US10399232B2)のうちの少なくとも1つに開示されている関節の位置を規定する安全機能、関節の速度を規定する安全機能などが挙げられる。簡単に言えば、協働ロボットアームは、デュアルエンコーダスキームにより衝突検出やエンコーダの故障検出などを含む安全機能を実現することができる。ここで、エンコーダ故障とは、主に以下の幾つかの方面に由来する。1)昔のエンコーダは信頼性が高くなく、エンコーダ自身が故障し易い。2)ロボットアームのサーボ駆動システムには、エンコーダの故障を調節する時に、通常閉ループのPIDフィードバックが用いられる。これは、ロボットアームの運転異常を招き易く、ひいては衝突事故が発生する。産業用アームには、産業用アームと従業員とを分離するために、物理的な安全フェンスが設置されているので、衝突事故は設備と材料の損傷を招くだけである。しかし、協働ロボットアームには、従業員と協働ロボットアームとのマンマシン連携を容易にするために、物理的な安全フェンスが設置されていないため、衝突事故は設備と材料の損傷を招くだけでなく、人身安全事故の発生を招く。従って、協働ロボットアームは、エンコーダ故障の発生を受け入れることができない。これまで、業界内の協働ロボットアームには、安全機能を確保するために、いずれもユニバーサルロボット会社のデュアルエンコーダスキームが採用されている。
【0004】
さらに、従来のマルチコイルアブソリュートエンコーダは、体積が大きく、精度が低く、コストが高く、マルチコイルアブソリュートエンコーダに記録された回転数を保存するために追加のバッテリを設置する必要があるため、初期にモータの出力軸にマルチコイルアブソリュートエンコーダを設置するスキームは、通常、体積、価格に敏感でない産業用アームに使用されていた。マルチコイルアブソリュートエンコーダのスキームに比べて、ロボットアームの電極の出力軸と減速機の出力軸にそれぞれシングルコイルアブソリュートエンコーダを設置する方式(即ち、デュアル・シングルコイルアブソリュートエンコーダ方式)は、体積や構造設定がより自由で、技術難度がより低いなどの特徴を備えているため、コストがより低く、且つさらに多くの安全機能を実現することができるため、協働ロボットアームに通常デュアル・シングルコイルアブソリュートエンコーダの方式が採用されている。
【0005】
しかし、近年、国内メーカーは協働ロボットアームに対する海外メーカーの技術独占を打破しつつあり、性能がほぼ同じである場合、設備の販売価格及び生産コストは設備の販売全体を決める重要な要素であるため、協働ロボットアームの生産コストを下げることは協働ロボットアームの市場競争力を高めるための重要な指標となっている。
【0006】
エンコーダの技術発展に伴い、マルチコイルアブソリュートエンコーダの体積、生産コスト、信頼性及び精度は共に大幅に向上した。このうち、シングルコイルアブソリュートエンコーダとマルチコイルアブソリュートエンコーダの購入コストは、通常それぞれ120人民元と150人民元であり、同等の場合、マルチコイルアブソリュートエンコーダスキームのコストはデュアル・シングルコイルアブソリュートエンコーダスキームのコストに比べて、90人民元を低減でき、幅落ちが37.5%であり、これは極めて顕著である。さらに、デュアル・シングルコイルアブソリュートエンコーダの方式に比べて、マルチコイルアブソリュートエンコーダの方式は体積及び精度の面で劣ってない。
【0007】
さらに、国内メーカーは通常国産のモータ、減速機及び電磁制動を採用していること、及び国産のチップを制御ボードICと給電回路ICとして採用していることから、協働ロボットアームの関節モジュールの故障率が高いことを招く。さらに、エンコーダは、出荷前にキャリブレーションを行い、その検出精度を確保する必要がある。このキャリブレーションは、専用設備と専門技術者を必要とする。これに基づき、関節モジュールが一旦故障し且つ修理を行う場合、故障がエンコーダにないが、修理に先ずエンコーダを取り外す必要がある場合、エンコーダを改めてインストールした後に再度キャリブレーションする必要がある。この再キャリブレーションは、工場に返さなければ完成できない。それは、ユーザーが専用設備と専門のエンジニアを持っていないからである。これにより、協働ロボットアームの修理には、メーカーとユーザーにとってのコストがいずれも高い。その中で、メーカーのコストは、専門のエンジニアと専用設備を手配して、ユーザーのエンコーダの再較正を支援し、メーカーが予定していた生産計画に影響を与えることに由来する。ユーザーのコストは、故障した機器を往復して郵送することやメーカーがエンコーダを再較正したことによる生産延期に起因し、ユーザーが予定していた生産計画に影響を与える。
【発明の概要】
【発明が解決しようとする課題】
【0008】
以上のように、協働ロボットアームの市場競争力を高めるためには、エンコーダのコストを削減し、エンコーダの生産実装及び故障修理時のキャリブレーションの難しさを低減させることは既に早急に解決すべき技術問題となっている。
【課題を解決するための手段】
【0009】
本願の実施形態による協働ロボットアームに用いられる関節モジュールは、関節ハウジングと、駆動アセンブリと、マルチコイルアブソリュートエンコーダを備え、前記駆動アセンブリは、出力軸と、前記出力軸を包むように設けられるロータと、前記関節ハウジング内に嵌設されるステータとを含み、前記ロータは、前記ステータの内側に位置し、前記関節モジュールは、マルチコイルアブソリュートエンコーダのみにより前記出力軸の角位置を検出し、且つ前記出力軸の回転数を記録し、前記マルチコイルアブソリュートエンコーダは、ベース、軸受、回転軸、エンコードディスク及び回路基板を含み、前記軸受は、前記ベースの軸受孔内に嵌設され、前記回転軸は、接続部、挿脱部及び外延部を含み、前記挿脱部は、前記接続部の一端に接続され、前記外延部は、前記接続部の他端に接続され、前記接続部は、前記軸受の内輪に嵌設され、前記挿脱部は、前記軸受の一方側から延出し、前記外延部は、前記軸受の他方側から延出し、前記エンコードディスクは、前記外延部に接続され、前記回路基板は、前記ベースに接続され且つ読取ヘッドが設けられており、前記読取ヘッドは、前記エンコードディスクと協力して前記出力軸の角位置を検出し、ここで、前記ベースは、前記関節ハウジングと取り外し可能に連接され、前記回転軸は、前記挿脱部を介して前記出力軸と取り外し可能に連接されている。
【0010】
また、本願の実施形態による協働ロボットアームに用いられる関節モジュールは、関節ハウジングと、駆動アセンブリと、減速アセンブリと、マルチコイルアブソリュートエンコーダとを備え、前記駆動アセンブリは、出力軸と、前記関節ハウジング内に嵌設されたステータと、前記出力軸の外周を包むように設けられ且つ前記ステータの内側に位置するロータとを含み、前記減速アセンブリは、前記出力軸に連接され、前記減速アセンブリの出力端子には、エンコーダが設けられていなく、前記マルチコイルアブソリュートエンコーダは、一体型に設置され、且つ前記出力軸と着脱可能に接続されて、前記出力軸の角位置を検出し、且つ前記出力軸の回転数を記録する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
5か月前
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
20日前
株式会社ツノダ
挟持工具
1か月前
株式会社ツノダ
挟持工具
2か月前
個人
ペットボトル用蓋開け具。
6か月前
UTM株式会社
搬送装置
5か月前
株式会社右川ゴム製造所
把持装置
29日前
川崎重工業株式会社
ハンド
2か月前
個人
ロボットシステム
4か月前
トヨタ自動車株式会社
関節機構
4か月前
株式会社不二越
ロボット
4か月前
学校法人立命館
グリッパ
1か月前
学校法人立命館
ロボットハンド
1か月前
トヨタ自動車株式会社
関節機構
5か月前
個人
プーリーキー抜き治具
1か月前
個人
作業台
5か月前
株式会社不二越
予測システム
2か月前
株式会社越智工業所
ブレーカ用カバー
4か月前
株式会社ダイヘン
情報処理装置
29日前
工機ホールディングス株式会社
作業機
2か月前
国立大学法人東北大学
剛性可変連結体
5か月前
株式会社ダイヘン
画像生成装置
29日前
株式会社ダイヘン
画像生成装置
29日前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
4か月前
小倉クラッチ株式会社
ロボットハンド
4か月前
株式会社中村製作所
トルクドライバー
1か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社共和製作所
ロボット用アーム
7日前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
3か月前
ユニタイトシステムズ株式会社
反力治具
5か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ