TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024053250
公報種別
公開特許公報(A)
公開日
2024-04-15
出願番号
2022159366
出願日
2022-10-03
発明の名称
走行装置及び走行方法
出願人
シャープ株式会社
代理人
個人
,
個人
,
個人
主分類
B61D
47/00 20060101AFI20240408BHJP(鉄道)
要約
【課題】台車を適切に牽引することが可能な走行装置及び走行方法を提供する。
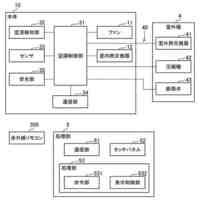
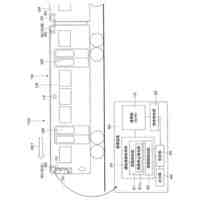
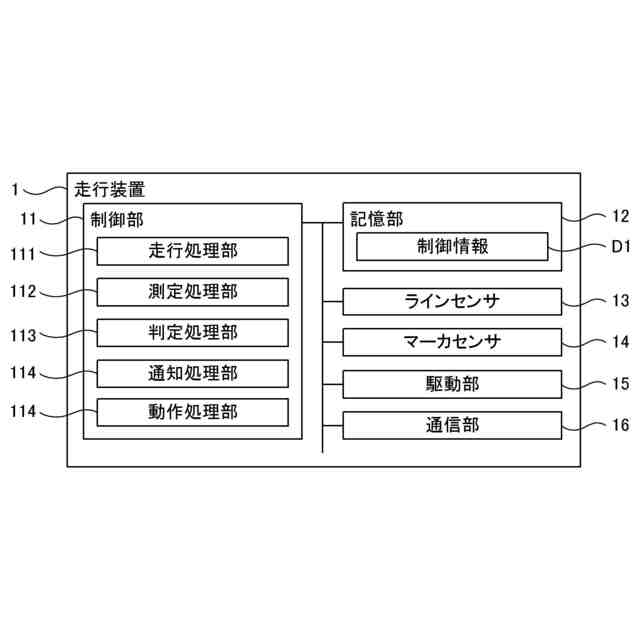
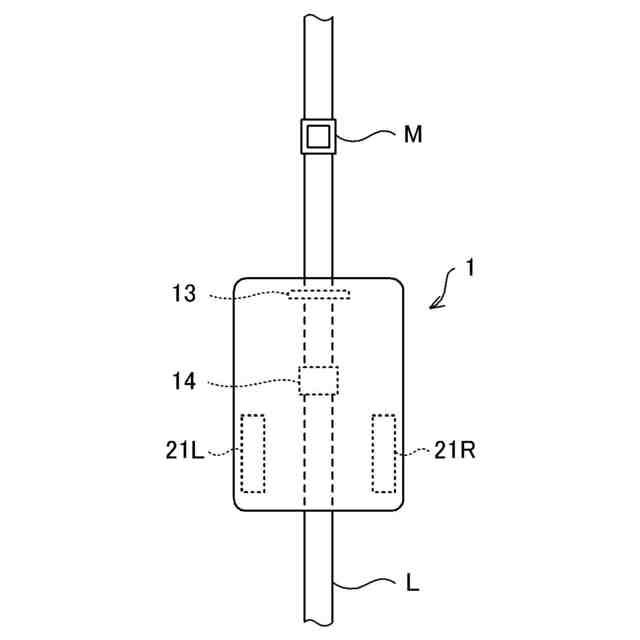
【解決手段】走行装置は、自在に旋回可能な車輪を備える台車を牽引する走行装置であって、前記車輪までの距離を測定する測定処理部と、前記走行装置が走行する際の前記距離の変化に基づいて、前記車輪の向きを判定する第1判定処理部と、前記第1判定処理部により判定される前記車輪の向きに基づいて、前記台車の積載状態を判定する第2判定処理部と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
自在に旋回可能な車輪を備える台車を牽引する走行装置であって、
前記車輪までの距離を測定する測定処理部と、
前記走行装置が走行する際の前記距離の変化に基づいて、前記車輪の向きを判定する第1判定処理部と、
前記第1判定処理部により判定される前記車輪の向きに基づいて、前記台車の積載状態を判定する第2判定処理部と、
を備える走行装置。
続きを表示(約 990 文字)
【請求項2】
前記第2判定処理部により判定される前記台車の積載状態に応じた情報を通知する通知処理部をさらに備える、
請求項1に記載の走行装置。
【請求項3】
前記通知処理部は、前記第2判定処理部により前記台車の積載状態が過積載状態又は偏荷重状態であると判定された場合に、警告情報を通知する、
請求項2に記載の走行装置。
【請求項4】
前記第2判定処理部により判定される前記台車の積載状態に応じた所定動作を前記走行装置に実行させる動作処理部をさらに備える、
請求項1に記載の走行装置。
【請求項5】
前記動作処理部は、前記第2判定処理部により前記台車の積載状態が過積載状態又は偏荷重状態であると判定された場合に、前記走行装置に前記所定動作を実行させる、
請求項4に記載の走行装置。
【請求項6】
前記動作処理部は、前記走行装置を直進走行させる場合に、前記走行装置を左右方向に移動させて前記台車の車輪を旋回させてから前記走行装置を直進走行させる、
請求項5に記載の走行装置。
【請求項7】
前記動作処理部は、前記走行装置を旋回走行させる場合に、前記走行装置を後進走行させて前記台車の前記車輪を反転させてから前記走行装置を旋回走行させる、
請求項5に記載の走行装置。
【請求項8】
前記台車の複数の前記車輪のうち特定の車輪の向きが他の車輪とは異なる方向に向いている場合に、
前記動作処理部は、前記走行装置を第1方向に走行させる場合に、前記走行装置を前記特定の車輪の方向に移動させてから前記第1方向に走行させる、
請求項5に記載の走行装置。
【請求項9】
前記台車の複数の前記車輪のうち特定の車輪の第1方向側が偏荷重状態の場合に、
前記動作処理部は、前記走行装置を前記第1方向とは異なる方向に旋回させる、
請求項5に記載の走行装置。
【請求項10】
前記動作処理部は、前記走行装置が過積載状態又は偏荷重状態の場合の旋回半径を、前記走行装置が過積載状態又は偏荷重状態ではない場合の旋回半径よりも大きくする、
請求項5に記載の走行装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、走行ルートに従って自律走行可能な走行装置及び走行方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
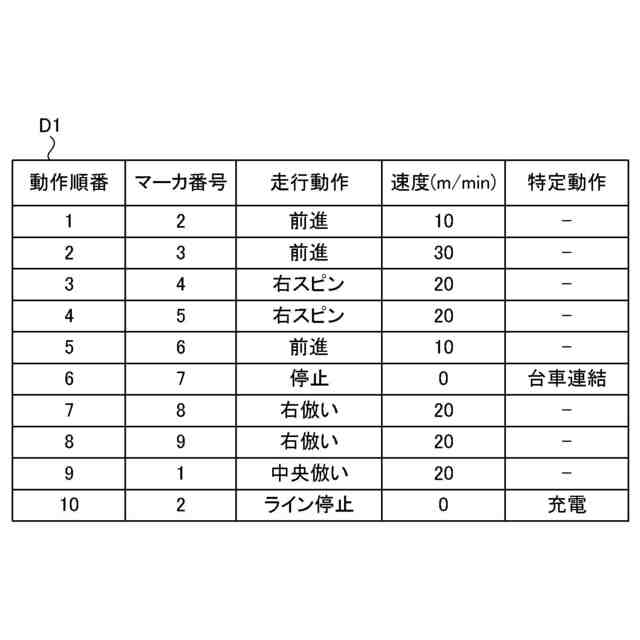
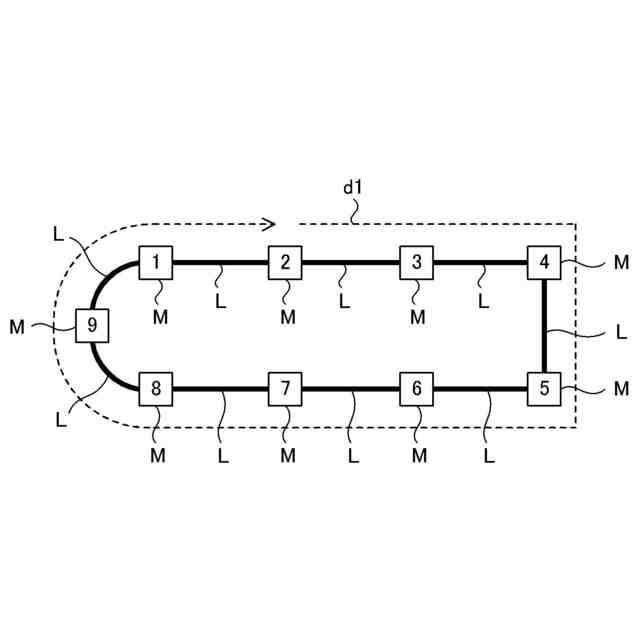
従来、走行装置(AGV、無人搬送装置ともいう。)が、工場、倉庫などで利用されている。走行装置は管理サーバーからの指示に従い、指定の走行経路を走行する。また、走行装置は、走行経路上の床面に配置されたマーカ(例えばRFIDタグ)を読み取り、読み取ったマーカの識別子情報に基づいて現在位置を取得したり、走行方向を切り替えたり、停止したり、充電動作を実行したり、台車を連結したりするなど、マーカの識別子情報に関連付けられた所定の動作を実行する(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2019-204538号公報
【発明の概要】
【発明が解決しようとする課題】
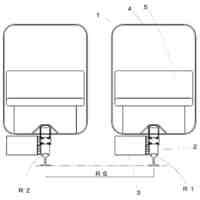
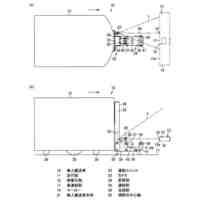
【0004】
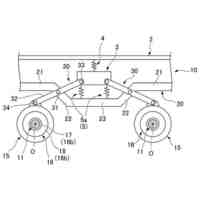
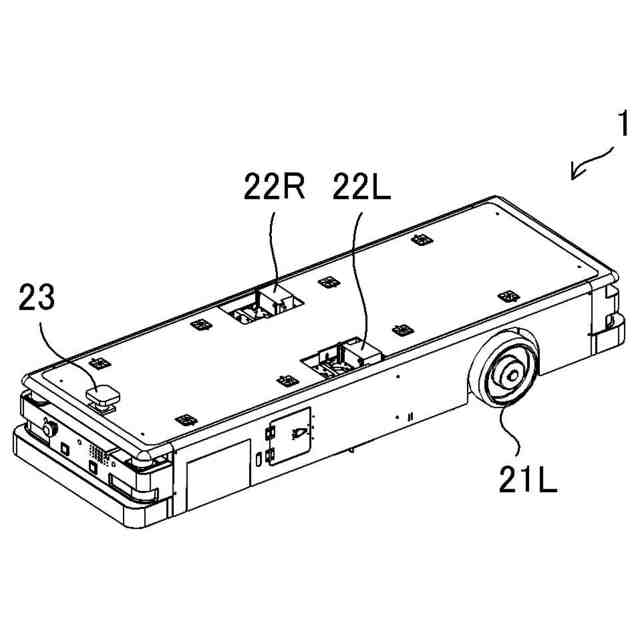
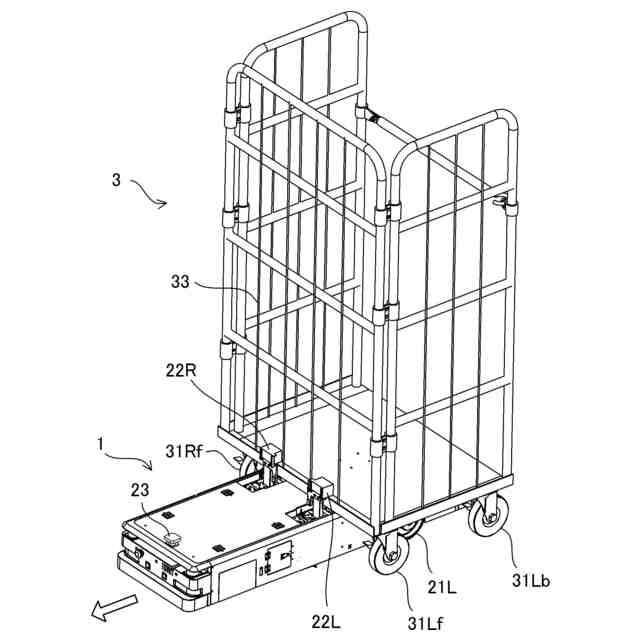
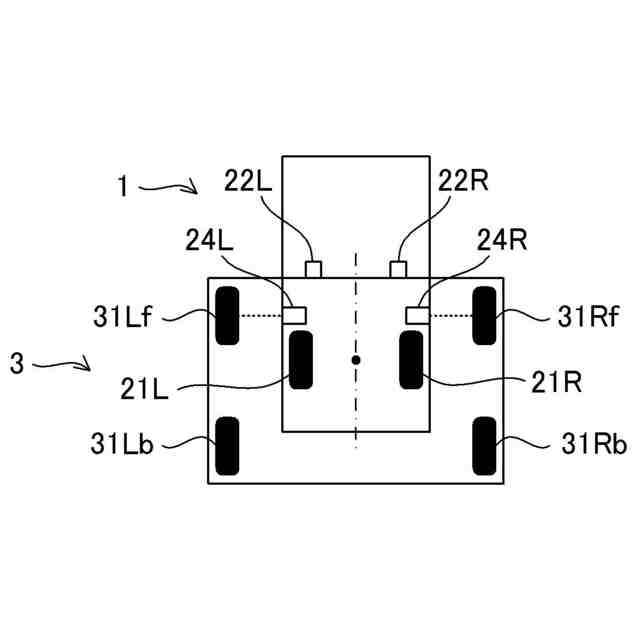
ここで、走行装置に台車を連結して、走行装置が台車を牽引して走行する場合に、以下の問題が生じる恐れがある。図28には、走行装置1及び台車3を上方から見た図を示している。走行装置1は、左側の駆動車輪21Lと、右側の駆動車輪21Rと、台車3を連結するための左側の連結器22L及び右側の連結器22Rとを備えている。台車3は、進行方向に応じて自在に回転可能な左側前方のキャスター31Lfと、左側後方のキャスター31Lbと、右側前方のキャスター31Rfと、右側後方のキャスター31Rbとを備えている。
【0005】
例えば図29に示すように、走行装置1は、台車3を連結する場合に車体の後方部分を台車3の下に潜り込ませて連結器22L、22Rを台車3に引っ掛ける。この状態では、台車3の下に走行装置1の駆動車輪21L、21Rが配置され、台車3の範囲内に走行装置1の旋回中心C1が位置することになる。
【0006】
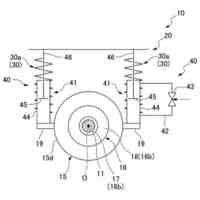
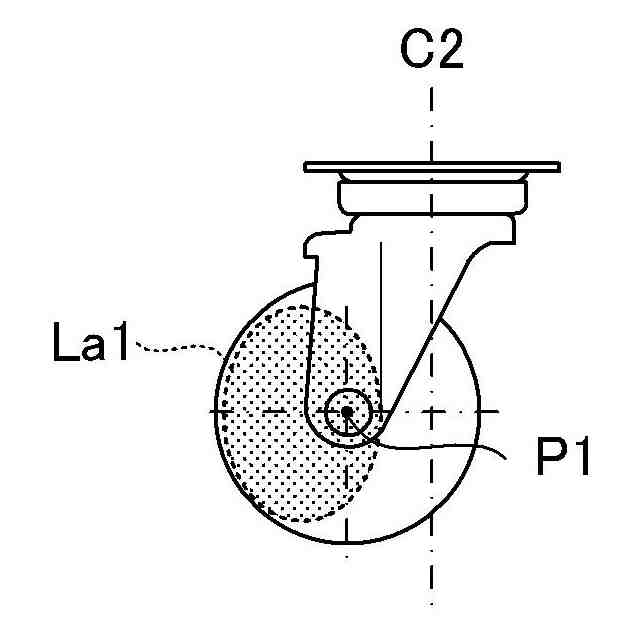
台車3の各車輪は、図30に示すように、車輪の回転軸P1の位置と旋回軸C2の位置とをずらすことにより、牽引方向に車輪が旋回する構造を有している。この構造により、図31及び図32に示すように、車輪が牽引方向に自在に回転するため、台車3を滑らかに牽引することが可能となる。
【0007】
左右の駆動車輪が独立に駆動される走行装置1においては、左右の駆動車輪を逆向きに回転させることにより、定置旋回などの動作が可能になっている。走行装置1の旋回中心C1が台車3の範囲内にあるため、定置旋回時には台車3のキャスターは図33に示す向きになる。
【0008】
ここで、台車3を牽引する走行装置1が直進→停止→右定置旋回の順に走行する場合を考える。
【0009】
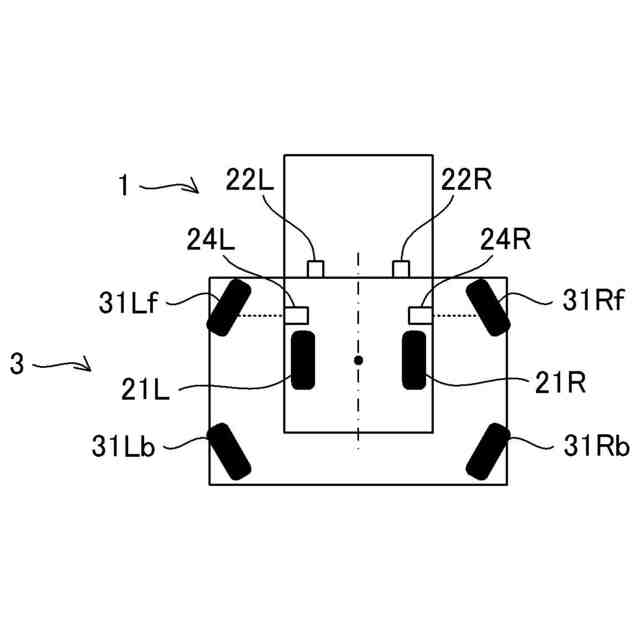
直進時には台車3の全ての車輪が同一方向を向いているが、定置旋回時には車輪の向きが旋回中心C1を軸とした円に沿うように変化する。例えば図34に示すように、右方向の定置旋回では、右側のキャスター31Rf、31Rbの向きが反転することになる。特に、台車3を用いて倉庫内を巡回し、荷物をピッキングする用途において、荷物が不定形な場合などには、台車3において積み込み時に偏荷重が生じ易くなる。上記の例において、台車3の積載重量の上限近くまで荷物を積んでいる時に右側にかかる荷重が大きくなると、右側のキャスター31Rf、31Rbの向きが変わり難くなる。
【0010】
このように、右側のキャスター31Rf、31Rbの向きが変わらず横滑りの状態になると、台車3が動き難くなり、走行装置1の駆動車輪が空転して動けなくなったり、動かないキャスター31Rf、31Rbを中心に旋回して異常な動きになったりする問題が生じる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
シャープ株式会社
加熱調理器
今日
シャープ株式会社
空気調和機、及びプログラム
今日
シャープ株式会社
空調システム、空清アタッチメント、及び空気調和機
今日
シャープ株式会社
空調システム、空清アタッチメント、及び空気調和機
今日
個人
鉄道車両の脱線防止の構造
2か月前
日本信号株式会社
地上子
2か月前
個人
車両間乗降システム
1か月前
オムロン株式会社
転落検知システム
13日前
株式会社ソラリス
管内検査ロボット
3か月前
公益財団法人鉄道総合技術研究所
上屋
2か月前
日本信号株式会社
列車検知装置
2か月前
株式会社ダイフク
レール
2か月前
株式会社 空スペース
跨座式モノレール車両
1か月前
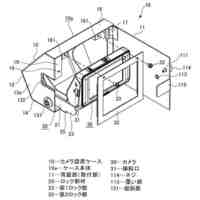
コイト電工株式会社
カメラ設置ケース
3か月前
株式会社ダイフク
搬送車
3か月前
日本ケーブル株式会社
索道の空調装置付搬器
2か月前
日本信号株式会社
信号システム
2か月前
愛知機械テクノシステム株式会社
台車
29日前
株式会社京三製作所
地上子
14日前
個人
線路上落とし物回収バネ、粘着付きポール
2か月前
株式会社ダイフク
物品搬送車
3か月前
株式会社京三製作所
ホーム柵
14日前
株式会社京三製作所
ホーム柵
14日前
オークラ輸送機株式会社
無人搬送車
1か月前
日本製鉄株式会社
鉄道車両
1か月前
日本信号株式会社
設備の状態監視装置
1か月前
株式会社京三製作所
回路制御器
1か月前
日本信号株式会社
軌道回路監視システム
1か月前
日本車輌製造株式会社
鉄道車体用無人搬送台車
1か月前
日本信号株式会社
車両安全支援システム
29日前
三菱重工業株式会社
台車
2か月前
三菱重工業株式会社
台車
2か月前
株式会社京三製作所
列車停止制御装置
1か月前
三菱重工業株式会社
台車
2か月前
三菱重工業株式会社
台車
2か月前
株式会社京三製作所
踏切保安システム
9日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ