TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024052768
公報種別
公開特許公報(A)
公開日
2024-04-12
出願番号
2024019313,2018207506
出願日
2024-02-13,2018-11-02
発明の名称
搬送システム、搬送方法、および物品の製造方法
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B61B
13/00 20060101AFI20240405BHJP(鉄道)
要約
【課題】 隣り合う2つの搬送モジュールをそれぞれ制御する制御部による電流制御が競合してしまうことによる、振動や、台車の位置ずれを抑制することを目的とする。
【解決手段】 少なくとも2つの搬送モジュールからなる搬送路と、前記搬送路を移動する台車と、前記2つの搬送モジュールそれぞれに設けられ、駆動指令によって前記台車を駆動する制御部と、前記2つの搬送モジュールのそれぞれに設けられたセンサと、を有し、前記駆動指令は、前記2つの搬送モジュールのそれぞれに設けられたセンサ間の距離によって補正されていることを特徴とする。
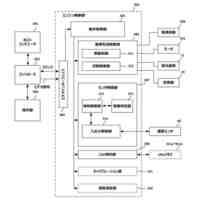
【選択図】 図3
特許請求の範囲
【請求項1】
少なくとも2つの搬送モジュールからなる搬送路と、
前記搬送路を移動する台車と、
前記2つの搬送モジュールそれぞれに設けられ、駆動指令によって前記台車を駆動する制御部と、
前記2つの搬送モジュールのそれぞれに設けられたセンサと、を有し、
前記駆動指令は、前記2つの搬送モジュールのそれぞれに設けられたセンサ間の距離によって補正されていることを特徴とする搬送システム。
続きを表示(約 890 文字)
【請求項2】
前記センサ間の距離は、前記それぞれに設けられたセンサによって求めた値であることを特徴とする請求項1記載の搬送システム。
【請求項3】
前記台車は、永久磁石を備え、
前記搬送モジュールは、コイル群を備え、
前記制御部は、前記コイル群に流れる電流量を制御することを特徴とする請求項1または2記載の搬送システム。
【請求項4】
前記制御部を制御する第二制御部をさらに有し、
前記駆動指令は、前記第二制御部から前記制御部に送信されることを特徴とする請求項1乃至3いずれか一項記載の搬送システム。
【請求項5】
前記駆動指令は、前記2つの搬送モジュールそれぞれに設定された座標系によってあらわされる位置を含むことを特徴とする請求項1乃至4いずれか一項記載の搬送システム。
【請求項6】
第一の駆動指令によって、前記台車を前記第一の搬送モジュールに沿って移動させ、
前記第一の駆動指令および第二の駆動指令によって、前記台車を前記第一の搬送モジュールと前記第二の搬送モジュールに跨って移動させ、
前記第二の駆動指令によって、前記台車を前記第二の搬送モジュールに沿って移動させる、台車の搬送方法であって、
前記第二の駆動指令は、前記第一の搬送モジュールに設けられた第一のセンサと、前記第二の搬送モジュールに設けられた第二のセンサとの間の距離によって補正されていることを特徴とする搬送方法。
【請求項7】
前記距離は、前記第一のセンサと前記第二のセンサとを用いて求められることを特徴とする請求項6記載の搬送方法。
【請求項8】
請求項1に記載の搬送システムと、少なくとも1つの工程装置を用いた物品の製造方法であって、
前記搬送システムによって前記台車を前記工程装置に搬送するステップと、
前記工程装置が、前記台車の上のワークに対して所定の工程を行うことにより、前記物品を製造するステップと、を具備する物品の製造方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、台車の搬送に関し、より具体的にはムービングマグネット型リニアモータ(MM型リニアモータ)技術を用いた搬送システムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
一般にファクトリーオートメーション化された工業製品を組み立てる為の製造現場では、複数のステーションの間で部品などを搬送する搬送システムが用いられている。
【0003】
近年、この搬送システムとして搬送路を複数の制御ゾーンに分割し、制御ゾーン毎に制御装置を配置し台車を制御ゾーン間で走行させる搬送システムが生産効率の上で優れており多用されている。
【0004】
このような搬送システムは、一般的に、各制御ゾーンを制御する複数の下位制御部と、その複数の下位制御部との間を結ぶ通信システムで接続される上位制御部とから構成される。
【0005】
特許文献1の搬送システムでは、上位制御部が生成した駆動指令を下位制御部にあらかじめ送っておき、上位制御部から下位制御部に一斉に搬送指令を送ることで、下位制御部に送られた駆動指令を実行する方法が示されている。
【先行技術文献】
【特許文献】
【0006】
特開2015-202793号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1の技術では、搬送モジュールどうしの間隔が所定の値からずれてしまい2つの搬送モジュールの境界を台車が通過する場合に、速度が変動し台車が振動してしまうことがある。また、2つの搬送モジュールの境界をまたぐ位置に台車を停止させる場合に、所望の停止位置精度を満たさない、あるいは所望の時間内に完全停止できないことがあった。
【0008】
本発明は、上記の事情に鑑みてなされたものであり、台車を高精度に搬送することを可能にする搬送手段を提供する事を目的とする。
【課題を解決するための手段】
【0009】
本発明の搬送システムは、
少なくとも2つの搬送モジュールからなる搬送路と、
前記搬送路を移動する台車と、
前記2つの搬送モジュールそれぞれに設けられ、駆動指令によって前記台車を駆動する制御部と、
前記2つの搬送モジュールのそれぞれに設けられたセンサと、を有し、
前記駆動指令は、前記2つの搬送モジュールのそれぞれに設けられたセンサ間の距離によって補正されていることを特徴とする。
【0010】
本発明の搬送方法は、第一の駆動指令によって、前記台車を前記第一の搬送モジュールに沿って移動させ、
前記第一の駆動指令および第二の駆動指令によって、前記台車を前記第一の搬送モジュールと前記第二の搬送モジュールに跨って移動させ、
前記第二の駆動指令によって、前記台車を前記第二の搬送モジュールに沿って移動させる、台車の搬送方法であって、
前記第二の駆動指令は、前記第一の搬送モジュールに設けられた第一のセンサと、前記第二の搬送モジュールに設けられた第二のセンサとの間の距離によって補正されていることを特徴とする。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
撮像装置
11日前
キヤノン株式会社
除電装置
23日前
キヤノン株式会社
アンテナ
16日前
キヤノン株式会社
現像装置
9日前
キヤノン株式会社
撮像装置
5日前
キヤノン株式会社
現像装置
9日前
キヤノン株式会社
撮像装置
13日前
キヤノン株式会社
記録装置
5日前
キヤノン株式会社
通信装置
2日前
キヤノン株式会社
撮像装置
19日前
キヤノン株式会社
撮像装置
17日前
キヤノン株式会社
撮像装置
16日前
キヤノン株式会社
撮像装置
11日前
キヤノン株式会社
撮像装置
5日前
キヤノン株式会社
半導体装置
18日前
キヤノン株式会社
光走査装置
13日前
キヤノン株式会社
レンズ鏡筒
12日前
キヤノン株式会社
画像形成装置
5日前
キヤノン株式会社
画像形成装置
6日前
キヤノン株式会社
画像形成装置
19日前
キヤノン株式会社
有機発光素子
19日前
キヤノン株式会社
画像形成装置
19日前
キヤノン株式会社
画像形成装置
19日前
キヤノン株式会社
画像形成装置
19日前
キヤノン株式会社
画像形成装置
19日前
キヤノン株式会社
画像形成装置
6日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
有機発光素子
16日前
キヤノン株式会社
有機発光素子
19日前
キヤノン株式会社
画像形成装置
19日前
キヤノン株式会社
情報処理装置
18日前
キヤノン株式会社
光電変換装置
4日前
キヤノン株式会社
画像形成装置
18日前
キヤノン株式会社
画像形成装置
10日前
キヤノン株式会社
画像形成装置
11日前
キヤノン株式会社
画像形成装置
16日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ