TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024043674
公報種別
公開特許公報(A)
公開日
2024-04-02
出願番号
2022148796
出願日
2022-09-20
発明の名称
飛行体
出願人
国立大学法人徳島大学
,
株式会社MMラボ
代理人
個人
,
個人
主分類
B64C
19/02 20060101AFI20240326BHJP(航空機;飛行;宇宙工学)
要約
【課題】可搬重量を自由に調整でき、しかも、飛行体の姿勢等を自由に調整できる飛行体を提供する。
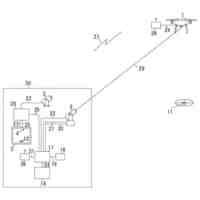
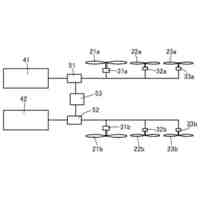
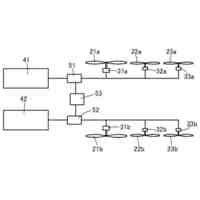
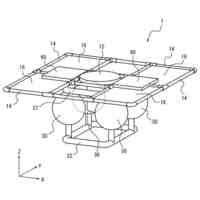
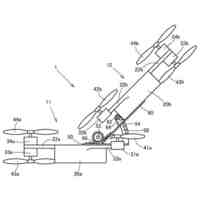
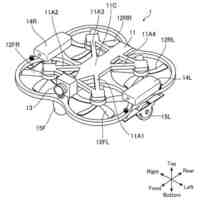
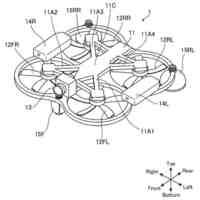
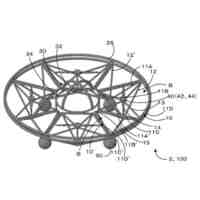
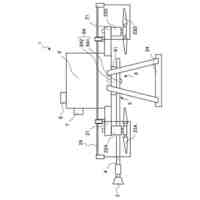
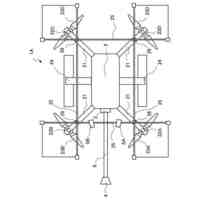
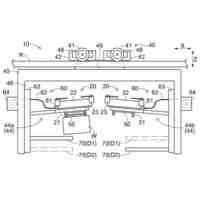
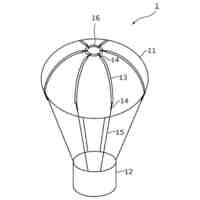
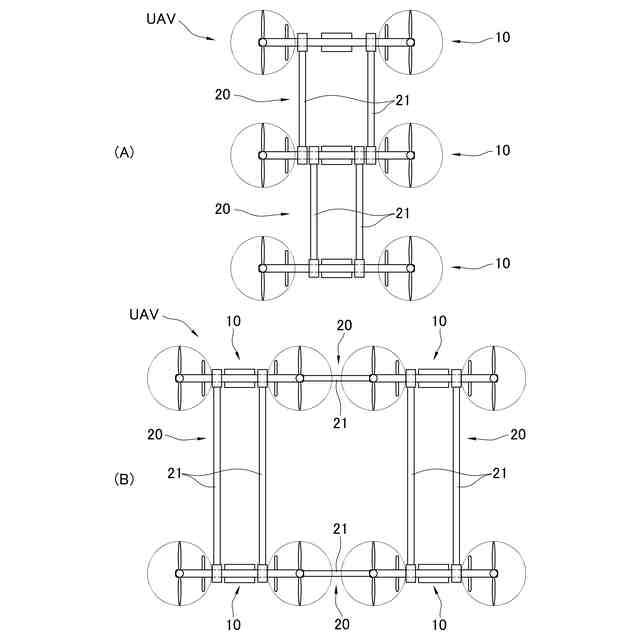
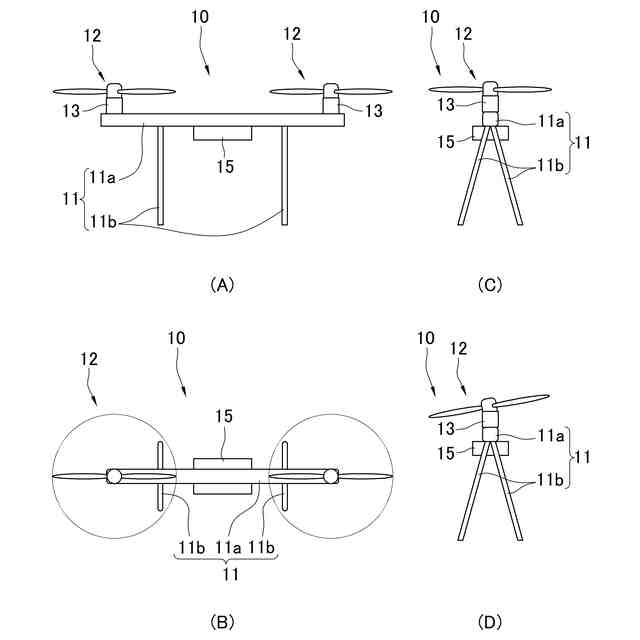
【解決手段】機体11といずれか2機の推進ロータ12,12とを有する複数の基準飛行体10と、複数の基準飛行体10を連結する連結部20と、を備え、連結部20は、基準飛行体10の機体11間に設けられる連結部材21と、連結部材21に設けられ、連結部材21と基準飛行体10の機体11とを相対的に移動可能および/または相対的な移動を固定可能に連結する連結機構25と、を有している。複数の基準飛行体10を連結部20によって連結するので、飛行体UAVの可搬重量を大きくすることができる。しかも、連結部20の連結機構25によって機体11と連結部材21とを固定したり移動可能連結したりできるので、飛行体UAVの姿勢の自由度を高くできる。
【選択図】図1
特許請求の範囲
【請求項1】
機体と少なくとも2機の推進ロータとを有する複数の基準飛行体と、
該複数の基準飛行体を連結する連結部と、を備え、
該連結部は、
前記基準飛行体の機体間に設けられる連結部材と、
該連結部材に設けられ、該連結部材と前記基準飛行体の機体とを相対的に移動可能および/または相対的な移動を固定可能に連結する連結機構と、を有している
ことを特徴とする飛行体。
続きを表示(約 640 文字)
【請求項2】
前記連結部は、
前記複数の基準飛行体の機体における2機の推進ロータ間の部分同士を、前記複数の基準飛行体のいずれか2機の推進ロータが並ぶ方向と前記連結部材の長手方向とが交差するように連結する、
および/または、
前記複数の基準飛行体の機体におけるいずれか2機の推進ロータが並ぶ方向における端部同士を、前記複数の基準飛行体のいずれか2機の推進ロータが並ぶ方向と前記連結部材の長手方向とが平行または交差するように連結する
ことを特徴とする請求項1記載の飛行体。
【請求項3】
前記複数の基準飛行体は、
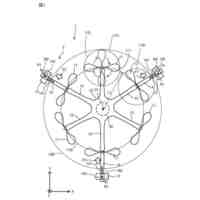
各推進ロータの回転軸の傾きを調整する姿勢調整機構を備えている
ことを特徴とする請求項1記載の飛行体。
【請求項4】
各基準飛行体は、
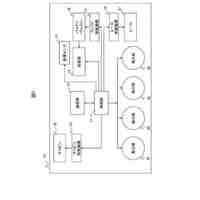
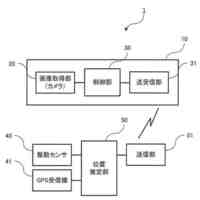
前記推進ロータおよび前記姿勢調整機構の作動を制御する制御部を備えており、
該制御部は、
前記連結部によって前記複数の基準飛行体の機体が連結されると、一の基準飛行体に設けられている制御部を主制御部とし他の基準飛行体に設けられている制御部を前記主制御部からの指示によって制御を行う従制御部とする機能を有しており、
前記主制御部は、
前記複数の基準飛行体を前記連結部によって連結した飛行体の姿勢に関する指示情報を前記従制御部に対して供給する機能を有している
ことを特徴とする請求項3記載の飛行体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、飛行体に関する。さらに詳しくは複数機を連結した飛行体に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
近年、自律飛行制御装置を搭載した小型無人航空機の実用化を目指して、様々な用途での開発が進められている。小型無人航空機の重要な用途として、物品を搬送する搬送機としての用途がある。小型無人航空機は、離着陸のために広い空間を必要としない、また、比較的狭い空間を通過できる、という利点がある。かかる利点から、離島などへの物品の搬送や被災地などの既存の交通網が遮断された地域への物品の搬送への適用が進められている。
【0003】
かかる物品の搬送では、搬送可能な物品の重量(可搬重量)が大きい方が望ましい。しかし、小型無人航空機の可搬重量を大きくする場合、小型無人航空機自体を大型化しなければならず、上述した小型無人航空機の利点を十分に発揮できない可能性がある。例えば、狭い空間を通過する場合には、小型無人航空機を傾ける必要性が生じる場合があるが、小型無人航空機を傾けた場合、搬送する物品の姿勢を安定に保つことが難しい場合がある。また、小型無人航空機を傾斜させることができても、その姿勢には限界がある。
【0004】
各小型無人航空機自体を大型化することなく可搬重量を大きくする方法として、複数の小型無人航空機を連結して一つの小型無人航空機とすることが考えられている(例えば、特許文献1)。
【0005】
また、二機のバイコプターを連結して飛行ロボットとすることによって、飛行ロボットの傾きを調整できるようにした技術が開示されている(非特許文献1参照)。かかる飛行ロボットであれば、飛行ロボットを用いた検査を実施する場合、検査対象となる構造物の形状に合わせて飛行ロボットの傾きを調整することによって構造物の検査を効果的に実施できる可能性がある。
【先行技術文献】
【特許文献】
【0006】
US2016/0378108A1
【非特許文献】
【0007】
川崎宏治他、“バイコプターを連結することにより任意のチルト姿勢を保持し移動制御可能な日鉱ロボット”、日本ロボット学会誌 Vol.33 No.4、pp285~291、2015
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかし、特許文献1の飛行体は、小型無人航空機を単に大型化した構造に近いので、飛行体の離発着には広いスペースが必要になるし、飛行体は狭い空間を飛行することができなくなる。すると、飛行体としたことによって可搬重量は大きくできるものの、小型無人航空機の利点は削減される。
【0009】
また、非特許文献1の飛行ロボットは、使用するモータ数を減らすために、プロペラの回転軸の傾きを調整する構成は採用しておらず、プロペラは各バイコプターの機体に固定されている。しかも、二機のバイコプターは矩形のフレーム内に配置されており、二機のバイコプターの距離はフレームによって固定されており、傾き以外の二機のバイコプターの相対的な動きはフレームによって制限されている。このため、二機のバイコプター同士の傾きや姿勢はある程度調整できるものの、飛行ロボットが取りうる姿勢は限定される。
【0010】
本発明は上記事情に鑑み、可搬重量を自由に調整でき、しかも、飛行体の姿勢等を自由に調整できる飛行体を提供することを目的とする。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行体
27日前
個人
ドローン係留装置
3か月前
個人
ドローンの計測飛行方法
6か月前
個人
自由落下運航システム
1か月前
個人
マルチコプター型電気飛行機
21日前
個人
マルチコプター
10か月前
合同会社アドエア
飛行体落下補助装置
2か月前
合同会社アドエア
飛行体落下補助装置
8か月前
株式会社FINEMECH
回転翼航空機
10か月前
株式会社FINEMECH
回転翼航空機
10か月前
株式会社中北製作所
羽ばたき装置
6日前
個人
飛行体
3か月前
河村電器産業株式会社
設備点検システム
5か月前
個人
気球及び温暖化防止システム
11か月前
個人
転落・墜落時事故防止用エアバッグ
11か月前
中国電力株式会社
物資運搬ドローン
8か月前
国立大学法人九州大学
飛行体
1か月前
京セラ株式会社
発着装置
6か月前
CAPXLE株式会社
緊急避難用気球
5か月前
CAPXLE株式会社
緊急避難用気球
5か月前
CAPXLE株式会社
緊急避難用気球
5か月前
SkyDeer株式会社
衛星制御方法
1か月前
株式会社FINEMECH
連結型回転翼航空機
5か月前
個人
ドローン
8か月前
株式会社JVCケンウッド
撮像システム
5か月前
個人
ドローン
11か月前
株式会社デンソー
推進装置
3か月前
株式会社エムアイエー
機体フレーム
2か月前
トヨタ自動車株式会社
飛行体
7か月前
株式会社FINEMECH
回転翼の可変ピッチ機構
6か月前
株式会社アイティーコスモス
移動体システム
11日前
日鉄テクノロジー株式会社
ドローン測定装置
4か月前
日鉄テクノロジー株式会社
ドローン測定装置
5か月前
株式会社ダイフク
搬送システム
1か月前
学校法人立命館
飛行体及び飛行体の駆動装置
6日前
株式会社岩谷技研
気球
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ