TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2023161160
公報種別
公開特許公報(A)
公開日
2023-11-07
出願番号
2022071338
出願日
2022-04-25
発明の名称
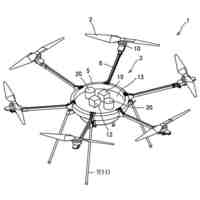
ドローンの計測飛行方法
出願人
個人
代理人
主分類
B64C
13/18 20060101AFI20231030BHJP(航空機;飛行;宇宙工学)
要約
【課題】飛行するドローンとの距離及び方向を自動的に計測する方法を提供する。
【解決手段】ドローンから地上との飛行位置の距離及び方向を継続的に計測して、計測した地上との距離及び方向の数値に従って継続的に飛行する。又は、地上から、ドローンの飛行位置の距離及び方向を計測して、計測した数値を飛行するドローンに送り、計測した地上との距離及び方向の数値に従って継続的に追尾飛行する。上空を飛行するドローンの飛行位置を、自動的に計測し、計測した位置に自動的に飛行させることができる。
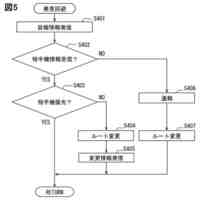
【選択図】図5
特許請求の範囲
【請求項1】
飛行するドローンに取り付けたテレビカメラで、地上の固定位置を撮影した、テレビカメラ画面で画像認識の方法等で認識した、前記固定位置の画像の位置に関連せた、数値制御のレーザー距離計測機で、前記固定位置までの距離及び方向を計測した数値で、前期ドローンを飛行させることを特徴とする方法。
続きを表示(約 1,200 文字)
【請求項2】
飛行するドローンをテレビカメラで撮影したテレビカメラ画面で、画像認識の方法等で認識した前記ドローンの画像の位置に関連させた、数値制御のレーザー距離計測機で、前記ドローンまでの距離及び方向を計測した数値で、前記ドローンを飛行させることを特徴とする方法。
【請求項3】
飛行するドローンをテレビカメラで撮影したテレビカメラ画面で、画像認識の方法等で認識した前記ドローンの画像の位置に関連させた、数値制御のテレビカメラで撮影したカメラカメラ画面の中心に、前記ドローンの画像が写る様に、前記数値制御のテレビカメラの駆動機構を駆動して、
前記数値制御のテレビカメラの前記中心方向を計測する様に、前記数値制御のテレビカメラに取り付けた、レーザー距離計測器で、前記ドローンまでの距離及び方向を計測した数値で、前記ドローンを飛行させることを特徴とする方法。
【請求項4】
請求項3の前記数値制御のテレビカメラの駆動数値に、関連させた前記ドローンに取り付けた、前記数値制御のレーザー距離計測を駆動して、前記ドローンまでの距離及び方向を、計測することを特徴とする方法。
【請求項5】
飛行するドローンに取り付けたテレビカメラで、地上の固定位置を撮影して、送信されたテレビカメラ画面で、画像認識の方法等で認識した、前記固定位置の画像の位置に関連せた、前記ドローンに取り付けた数値制御のレーザー距離計測機の駆動数値を、前記ドローンに送信して、前記数値制御のレーザー距離計測機を駆動して、前記固定位置までの距離及び方向を計測した数値で、前ドローンを飛行させることを特徴とする方法。
【請求項6】
飛行するドローンに取り付けたテレビカメラで、地上の固定位置を撮影して、送信されたテレビカメラ画面で、画像認識の方法等で認識した、前記固定位置の画像の位置に関連せた、前記ドローンに取り付けた、数値制御のテレビカメラの駆動数値を、前記ドローンに送信した駆動数値で、前記数値制御のテレビカメラを駆動して、前記固定位置を撮影し、前記数値制御のテレビカメラで撮影したカメラカメラ画面の中心に、前記ドローンの画像が写る様に、前記数値制御のテレビカメラの駆動機構を駆動して、前記数値制御のテレビカメラの前記中心方向を計測する様に、前記数値制御のテレビカメラに取り付けたレーザー距離計測器で、前記固定位置までの距離及び方向を計測することを特徴とする方法。
【請求項7】
請求項1から6の何れかに記載の、計測位置から飛行する前記ドローンとの計測した距離及び方向の数値と、前記ドローンから、前記固定位置までの距離及び方向を計測した数値とを使って、前記飛行するドローンを介して、前記計測位置から前記固定位置までの距離及び方向を計測することを特徴とする方法。
【請求項8】
請求項1から7の何れかに記載の、前記計測位置から前記複数の固定位置との距離を、同期して計測することでを特徴とする方法。
発明の詳細な説明
【技術分野】
【0001】
ドローンは、幾つかの分野において、試験的に用いられている。
物流業界において、物品の配送に、ドローンを使う事例が幾つかの実証実験が行われている。
配送業務において、ドローンは常に人間により制御された状態で飛行される。
上空では、広い範囲の目視やGPSと方位と高度計での制御で飛行が可能であるが、配送先の地上の位置に着陸させるのには、人間による目視の操作に依頼している。
本願発明は、ドローンの離陸及び着陸の際の正確を要する操作を、画像認識と距離計測の方法使って
自動的に行うものである。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
画像認識と数値制御の距離計測機との関連方法
【先行技術文献】
【特許文献】
【0003】
特許第5508308号
特許第5547605号
特許第5547670号
特許第6719494号
【非特許文献】
【0004】
特願2018-039078号
特願2018-174323号
[未公開関連技術の開示]
特願2021-102081号
【発明を実施するための形態】
【0005】
本願発明は、本願発明者が、既に取得した特許第6719494号及びPCT2018-00491、特許第5508308、5547605、5547670号等の発明から派生したものである。
特許第6719494は、PCT国際出願済の国際出願番号はPCT/JP2019/036238と、特願2018-174323も、PCT国際出願済の国際出願番号PCT/2019/004491である。
本出願の実施説明において、説明を明快にするために、上記出願済みの特許を本出願特許で実施す形態を説明する。
記載事項の説明
ドローン、汎用機。
レーザー距離計測器、汎用機。
数値制御レーザー距離計測機、計測レーザー光の照射方向を、数値制御機構の駆動数値で制御される。
テレビカメラ、汎用機、座標位置を出力する機能としても説明している。
数値制御テレビカメラ、撮影方向と撮影画角等を、数値制御機構の駆動数値で制御される。
テレビカメラ画面、汎用モニター画面、画像の座標位置を出力する機能としても説明している。
座標位置、テレビカメラ画面の水平垂直走査の位置、又は、走査時間位置。
画像認識、テレビカメラ画面から検出画像、画像認識等の方法で検出された画像の座標位置。
計測位置、飛行移動するドローンを計測する位置、又は、計測地点。
固定位置、飛行移動するドローンに対しての固定位置、又は、計測目標位置、絶対方位位置。
追尾、テレビカメラ画面上で画像認識した画像の座標位置に合わせて、画像の被写体に計測レーザー光の照射方向、又は、テレビカメラ撮影方向を向け、テレビカメラ画面上の画像の移動に合わせて、照射方向、又は、撮影方向を追尾する。
テレビカメラ画面の位置と数値制御のレーザー距離計測機の駆動数値と関連させる説明。
【0006】
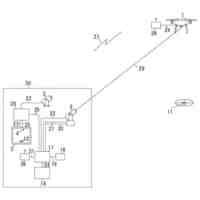
上記、特許第6719494号は、発明の詳細については省くが、数値制御で駆動する駆動機構のレーザー距離計測機のレーザー光を照射された位置を、テレビカメラで撮影し、そのテレビカメラ画面上のその照射されたレーザー光の画像が写る座標位置と、その駆動機構のレーザー距離計測機の駆動数値とを関連付ける。
レーザー距離計測機の駆動数値を操作卓で操作して照射された幾つかの位置を、テレビカメラで撮影したテレビカメラ画面上の、その照射された画像の写る幾つかの座標位置との関連する数値を使って、そのテレビカメラモニター画面上の全ての、照射される画像の写る位置と、その照射に対応するレーザー距離計測機の駆動数値とを関連付ける数値を、補間演算等の演算で取得する。
【0007】
テレビカメラで撮影したテレビカメラモニター画面上の全ての位置に対応して、レーザー距離計測機の計測用レーザー光を照射して、その全ての位置の被写体からの反射光で距離を計測する。
上記、テレビカメラ画面上の画像認識した画像の写る位置に対応した、その駆動数値で駆動機構のレーザー距離計測機を駆動して、その画像認識した画像の被写体に、計測用レーザー光を照射して、その反射光で、その被写体との距離を直接計測する。
画像認識を継続することで、テレビカメラ画面上の画像の写る位置に、レーザー距離計測機を追尾駆動することができ、被写体との距離を継続的に、追尾計測することができる。
【0008】
テレビカメラ画面の位置と駆動数値のテレビカメラの駆動数値と関連させる説明。
上記、特許第5508308、5547605、5547670、6719494号、発明の詳細については省くが、テレビカメラで撮影したテレビカメラモニター画面上に写る画像の被写体を、数値制御で駆動する駆動機構のテレビカメラの駆動数値を、操作卓で操作して被写体を撮影する。
テレビカメラモニター画面上に写る被写体の画像の座標位置と、数値制御で駆動する駆動機構のテレビカメラで被写体を撮影する、駆動機構のテレビカメラを操作卓で操作した駆動数値とを関連付ける。
そのテレビカメラモニター画面上の幾つかの被写体が写る画像の座標位置を、操作卓で操作して数値制御で駆動する駆動機構のテレビカメラで被写体を撮影した、その駆動機構のテレビカメラの幾つかの駆動数値を使って、そのテレビカメラモニター画面上の全ての被写体が写る画像の座標位置と、その駆動機構のテレビカメラでその全ての被写体を撮影する、駆動数値とを関連付け数値を、補間演算等の演算で取得する。
【0009】
テレビカメラで撮影したテレビカメラモニター画面上に写る、被写体の座標位置の数値に関連付けた数値制御のテレビカメラの駆動数値を使って、駆動数値のテレビカメラを駆動して被写体を撮影する。
テレビカメラで撮影したテレビカメラ画面で画像認識された、被写体の画像の座標位置を、駆動数値のテレビカメラを駆動してその画像の被写体を撮影する。
画像認識を継続することで、テレビカメラ画面上の画像の写る位置に、数値制御のテレビカメラを追尾駆動することかでき、被写体を撮影する画像を継続的に、追尾撮影することができる。
【0010】
本発明は、上記特許第5508308、5547605、5547670、6719494号から派生したものである。
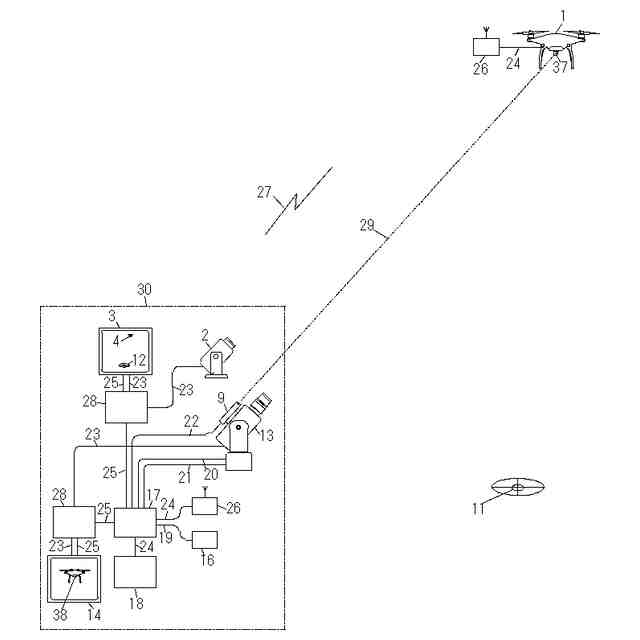
飛行するドローンをテレビカメラで撮影した画面からドローンを画像検出、又は画像認識し、その画像認識したテレビカメラ画面の画像の位置に関連付けた、数値制御のレーザー距離計測機の駆動数値を使って、その画像認識した画像の飛行するドローンへ向けて、数値制御のレーザー距離計測機から計測レーザー光を照射し、飛行するドローンとの距離を直接計測するものだある。
飛行するドローンをテレビカメラで継続的に撮影し、レーザー距離計測機から計測レーザー光を継続的に照射し、飛行するドローンとの距離を継続的に直接計測するものである。
飛行するドローンの位置を、継続的に直接計測することで、ドローンを計測した距離で飛行する方向を操作するものである。
飛行するドローンを、テレビカメラで撮影した、テレビカメラモニター画面に写る位置で直接距離計測することで、飛行するドローンをテレビカメラモニター画面に写る異なる位置、又は、そのレーザー距離計測機から計測した位置へ飛行させるものである。
画像認識を継続することで、テレビカメラ画面上の画像の写る位置に、レーザー距離計測機を追尾駆動することができ、ドローンとの距離を継続的に、追尾計測することがで、飛行するドローンを飛行操作ができる。
【発明の概要】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行体
1か月前
個人
ドローン係留装置
3か月前
個人
ドローンの計測飛行方法
6か月前
個人
マルチコプター型電気飛行機
26日前
個人
人工衛星推進材循環エンジン
4日前
個人
マルチコプター
11か月前
個人
自由落下運航システム
1か月前
合同会社アドエア
飛行体落下補助装置
8か月前
合同会社アドエア
飛行体落下補助装置
3か月前
株式会社FINEMECH
回転翼航空機
10か月前
株式会社FINEMECH
回転翼航空機
10か月前
個人
飛行体
3か月前
河村電器産業株式会社
設備点検システム
5か月前
個人
転落・墜落時事故防止用エアバッグ
11か月前
個人
気球及び温暖化防止システム
11か月前
株式会社中北製作所
羽ばたき装置
11日前
中国電力株式会社
物資運搬ドローン
8か月前
国立大学法人九州大学
飛行体
1か月前
SkyDeer株式会社
衛星制御方法
1か月前
CAPXLE株式会社
緊急避難用気球
5か月前
CAPXLE株式会社
緊急避難用気球
5か月前
株式会社E・C・R
無人飛翔体
12か月前
CAPXLE株式会社
緊急避難用気球
5か月前
京セラ株式会社
発着装置
6か月前
株式会社JVCケンウッド
撮像システム
6か月前
株式会社FINEMECH
連結型回転翼航空機
5か月前
株式会社デンソー
推進装置
3か月前
個人
ドローン
11か月前
個人
ドローン
9か月前
トヨタ自動車株式会社
飛行体
7か月前
株式会社エムアイエー
機体フレーム
3か月前
旭ビルウォール株式会社
移動システム
4か月前
株式会社岩谷技研
気球
1か月前
株式会社デンソー
飛行制御装置
11か月前
株式会社ダイフク
搬送システム
1か月前
日鉄テクノロジー株式会社
ドローン測定装置
5か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ