TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024045971
公報種別
公開特許公報(A)
公開日
2024-04-03
出願番号
2022151084
出願日
2022-09-22
発明の名称
搬送システム
出願人
株式会社ダイフク
代理人
弁理士法人R&C
主分類
B64F
1/36 20240101AFI20240327BHJP(航空機;飛行;宇宙工学)
要約
【課題】無人航空機を保持する搬送車を備え、無人航空機による物品の搬送効率が高い搬送システムを実現する。
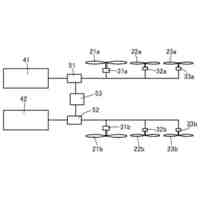
【解決手段】物品保持部21を備えた無人航空機20と、無人航空機20を保持する航空機保持部44を備え、規定の走行経路Rに沿って走行する搬送車40と、を備え、無人航空機20が物品保持部21により物品Wを保持した状態を物品保持状態とし、無人航空機20が物品保持部21により物品Wを保持していない状態を物品非保持状態として、航空機保持部44は、物品保持状態及び物品非保持状態のいずれの状態の無人航空機20でも保持できると共に、物品保持状態及び物品非保持状態のいずれの状態の無人航空機20でも離陸及び着陸できるように構成されている。
【選択図】図1
特許請求の範囲
【請求項1】
物品の保持及び当該保持の解除が可能である物品保持部を備えた無人航空機と、
前記無人航空機を保持する航空機保持部を備え、規定の走行経路に沿って走行する搬送車と、
を備え、
前記無人航空機が前記物品保持部により前記物品を保持した状態を物品保持状態とし、前記無人航空機が前記物品保持部により前記物品を保持していない状態を物品非保持状態として、
前記航空機保持部は、前記物品保持状態及び前記物品非保持状態のいずれの状態の前記無人航空機でも保持できると共に、前記物品保持状態及び前記物品非保持状態のいずれの状態の前記無人航空機でも離陸及び着陸できるように構成されている、搬送システム。
続きを表示(約 1,800 文字)
【請求項2】
前記無人航空機は、前記物品保持部により保持された前記物品よりも上側に位置する本体部を備え、
前記物品保持部は、前記物品を吊り下げた状態で保持するように構成され、
前記航空機保持部は、前記物品保持部に保持された前記物品よりも上側において前記本体部を下側から支持する支持部材を備え、
前記搬送車は、前記物品保持部に保持された前記物品よりも下側であって当該物品と上下方向視で重複する位置に配置され、前記物品の落下を規制する落下規制部材を備える、請求項1に記載の搬送システム。
【請求項3】
前記搬送車は、前記落下規制部材を、前記無人航空機の前記物品保持部により保持された前記物品の落下を規制する規制姿勢と、前記無人航空機の離陸及び着陸が行われる場合に当該無人航空機と干渉しない退避姿勢と、に姿勢変更する姿勢変更機構を備える、請求項2に記載の搬送システム。
【請求項4】
前記無人航空機が離陸及び着陸のために前記支持部材に対して相対移動する方向を相対移動方向とし、上下方向視で前記相対移動方向に直交する方向を相対移動直交方向とし、
前記無人航空機の前記本体部における前記支持部材により支持される部分を被支持部として、
前記支持部材は、前記物品と前記被支持部との上下方向の間に挿入される一対の挿入部と、一対の前記挿入部を連結する連結部とを備え、
一対の前記挿入部のそれぞれは前記相対移動方向に延在するように形成されていると共に、一対の前記挿入部が互いに前記相対移動直交方向に離間して配置されるように前記連結部により連結されている、請求項2に記載の搬送システム。
【請求項5】
一対の前記挿入部は、前記相対移動方向における、前記無人航空機が離陸及び着陸に際して出入りする側が高くなるように傾斜している、請求項4に記載の搬送システム。
【請求項6】
前記搬送車は、前記航空機保持部を少なくとも水平方向に沿って出退させる出退機構を備えている、請求項1から5のいずれか一項に記載の搬送システム。
【請求項7】
前記搬送車は、室内の天井に沿って設置された前記走行経路に沿って走行する天井搬送車であって、車輪を備えた走行部と、前記走行部よりも下側に配置されて前記航空機保持部に保持された前記無人航空機を収容する収容部と、を備え、
前記走行経路に沿う方向を走行方向とし、上下方向視で前記走行方向に直交する方向を幅方向として、
前記収容部は、離陸及び着陸を行う前記無人航空機が通る開口を少なくとも前記幅方向の両側に備える、請求項1から5のいずれか一項に記載の搬送システム。
【請求項8】
前記搬送車は、前記走行方向に並んで複数の前記航空機保持部を備え、
複数の前記航空機保持部のそれぞれは、前記無人航空機が前記幅方向のいずれかの側に離陸及び着陸するように構成されている、請求項7に記載の搬送システム。
【請求項9】
前記搬送車は、前記走行方向に並んで第1の前記航空機保持部である第1航空機保持部と第2の前記航空機保持部である第2航空機保持部とを備え、
前記収容部は、前記走行方向の両側にも前記開口を備え、
前記走行方向における前記第2航空機保持部に対して前記第1航空機保持部が配置された側を走行方向第1側とし、その反対側を走行方向第2側として、
前記第1航空機保持部は、前記無人航空機が前記走行方向第1側及び前記幅方向の両側に離陸及び着陸するように構成され、
前記第2航空機保持部は、前記無人航空機が前記走行方向第2側及び前記幅方向の両側に離陸及び着陸するように構成されている、請求項7に記載の搬送システム。
【請求項10】
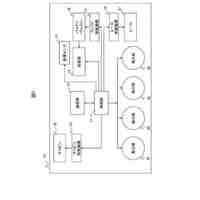
前記搬送車は、車輪及び前記車輪を駆動する電動機を備えた走行部と、前記走行部の減速中に前記電動機の回生制動を行って得られる電力を回収する回生電力回収部と、前記航空機保持部に保持された前記無人航空機に電力を供給する給電部と、を備え、
前記回生電力回収部により回収された電力が前記給電部から前記無人航空機に供給される、請求項1から5のいずれか一項に記載の搬送システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、無人航空機と搬送車とを備えた搬送システムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
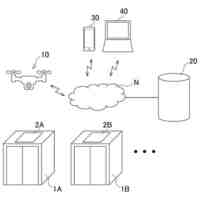
無人航空機と搬送車とを備えた搬送システムが知られている。以下、背景技術の説明において括弧内に示す符号は特許文献1のものである。特許文献1の図4Aから図4Dには、物品(40)及び無人航空機(470)を含む搬送車(450)と、を備えた搬送システムが開示されている。
【0003】
しかし、特許文献1の搬送システムの搬送車(450)では、無人航空機(470)と物品(40)とが別々に格納され、アイテム係合システム(458)により物品(40)を発射及び回収システム(452)上の無人航空機(470)に積み込むように構成されている。このため、例えば、搬送車(450)が移動する度に、無人航空機(470)と物品(40)とを別々に格納し、目的地に着くとアイテム係合システム(458)と発射及び回収システム(452)とを用いて無人航空機(470)に物品(40)を積み込む必要があり、搬送効率が低いという問題があった。
【先行技術文献】
【特許文献】
【0004】
特表2020-514173号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
そこで、無人航空機を保持する搬送車を備え、無人航空機による物品の搬送効率が高い搬送システムの実現が望まれる。
【課題を解決するための手段】
【0006】
本開示に係る搬送システムは、物品の保持及び当該保持の解除が可能である物品保持部を備えた無人航空機と、前記無人航空機を保持する航空機保持部を備え、規定の走行経路に沿って走行する搬送車と、を備え、前記無人航空機が前記物品保持部により前記物品を保持した状態を物品保持状態とし、前記無人航空機が前記物品保持部により前記物品を保持していない状態を物品非保持状態として、前記航空機保持部は、前記物品保持状態及び前記物品非保持状態のいずれの状態の前記無人航空機でも保持できると共に、前記物品保持状態及び前記物品非保持状態のいずれの状態の前記無人航空機でも離陸及び着陸できるように構成されている。
【0007】
本構成によれば、搬送車から目的地までの物品の搬送を無人航空機により行うことができるため、搬送車の走行経路から離れた目的地に対しても物品を搬送することができる。逆に言えば、搬送車の走行経路を想定される目的地の全てに近接させて設ける必要がなくなるため、走行経路の設置コストを低減できると共に、搬送車による物品及び無人航空機の搬送効率を高めることができる。また、物品を目的地まで搬送する場合には、物品保持状態の無人航空機を搬送車に保持させて目的地付近まで搬送車を走行させ、そこから物品保持状態のまま無人航空機を離陸させて目的地まで物品を搬送することができる。このように、物品保持状態の無人航空機を搬送車に保持させることができるため、搬送車が目的地付近に到着してから無人航空機が離陸するまでの時間を短く抑え易い。従って、物品の搬送効率を高めることができる。そして、物品を目的地まで搬送した後の無人航空機を再び搬送車に保持させることで、無人航空機を別の場所、例えば物品の受取場所まで搬送することができる。
【図面の簡単な説明】
【0008】
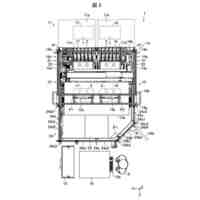
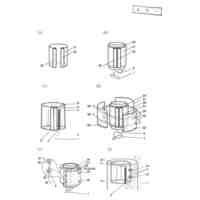
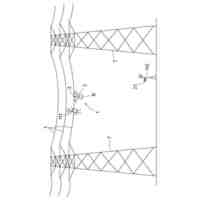
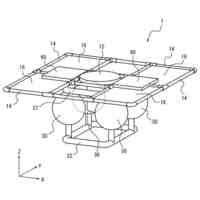
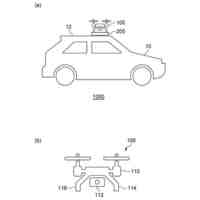
第1の実施形態に係る搬送システムの側面図
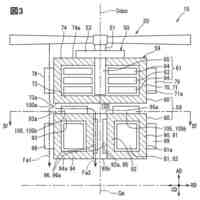
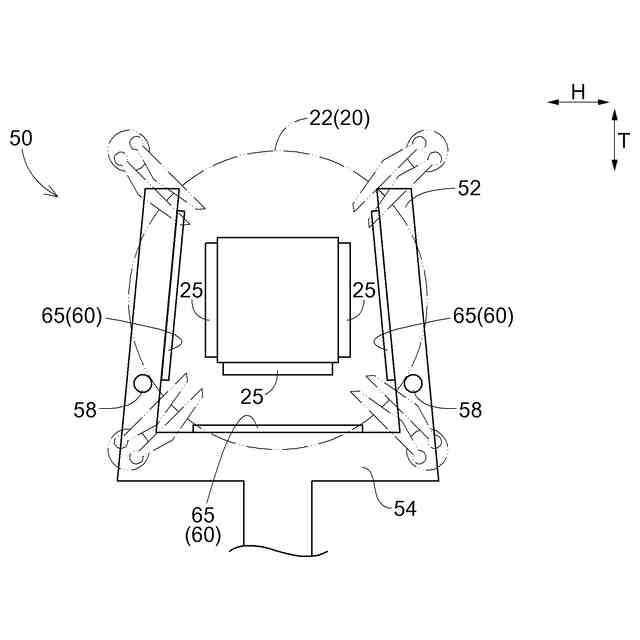
図1の航空機保持部の上面を示す図
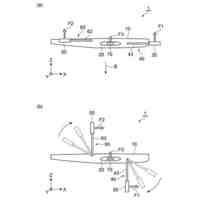
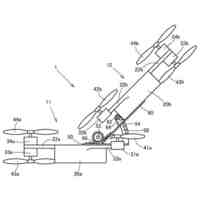
図1の航空機保持部及び無人航空機を拡大して示す図
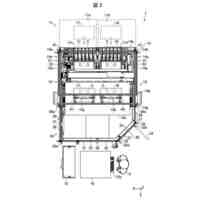
図1の搬送システムの出退機構を示す図
図2の支持部材の一例を拡大して示す図
図2の支持部材の他の例を拡大して示す図
図2の支持部材の他の例を拡大して示す図
第2の実施形態に係る搬送システムの支持部材を示す図
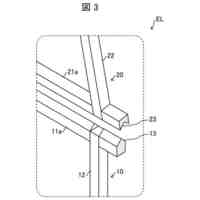
第3の実施形態に係る搬送システムの側面図
図9の航空機保持部の上面を示す図
第4の実施形態に係る搬送システムの側面図
図11の航空機保持部の上面を示す図
第5の実施形態に係る搬送システムの側面図
図13の航空機保持部の上面を示す図
第6の実施形態に係る搬送システムの支持部材を示す図
【発明を実施するための形態】
【0009】
〔第1の実施形態〕
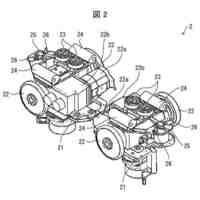
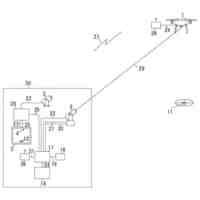
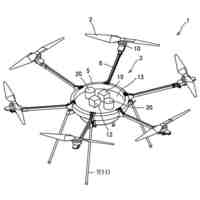
以下では、第1の実施形態に係る搬送システム10について、図面を参照して説明する。搬送システム10は、無人航空機20と搬送車40とを備えている。図1は、本実施形態に係る搬送システム10の側面図である。図2は、搬送車40が備える航空機保持部44の上面を示す図である。図3は、無人航空機20及び航空機保持部44の側面を拡大して示す図である。
【0010】
本実施形態では、無人航空機20は、物品Wの保持及び当該保持の解除が可能である物品保持部21を備えている。無人航空機20としては、遠隔操作或いは自律飛行が可能な固定翼機や回転翼機が例として挙げられる。本実施形態では、無人航空機20は垂直離着陸可能な電動式の回転翼機である。好適には、無人航空機20は自律飛行が可能なマルチコプタ(所謂ドローン)である。また、好適には、無人航空機20は、後述の給電線62を介して搬送車40が備える電源部63から電力が供給される有線式の回転翼機である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ダイフク
組立棚
17日前
株式会社ダイフク
搬送設備
2日前
株式会社ダイフク
保管設備
2日前
株式会社ダイフク
物品搬送設備
10日前
株式会社ダイフク
データ作成装置
10日前
株式会社ダイフク
非接触給電設備
18日前
株式会社ダイフク
走行台車、搬送システム
17日前
株式会社ダイフク
移載システム、移載設備および仕切材
24日前
株式会社ダイフク
移載システム、並びにその制御方法および制御プログラム
24日前
個人
飛行体
1か月前
個人
ドローン係留装置
3か月前
個人
ドローンの計測飛行方法
6か月前
個人
マルチコプター型電気飛行機
27日前
個人
人工衛星推進材循環エンジン
5日前
個人
マルチコプター
11か月前
個人
自由落下運航システム
1か月前
合同会社アドエア
飛行体落下補助装置
8か月前
合同会社アドエア
飛行体落下補助装置
3か月前
株式会社FINEMECH
回転翼航空機
10か月前
株式会社FINEMECH
回転翼航空機
10か月前
個人
飛行体
3か月前
河村電器産業株式会社
設備点検システム
5か月前
個人
転落・墜落時事故防止用エアバッグ
11か月前
個人
気球及び温暖化防止システム
12か月前
株式会社中北製作所
羽ばたき装置
12日前
中国電力株式会社
物資運搬ドローン
8か月前
国立大学法人九州大学
飛行体
2か月前
SkyDeer株式会社
衛星制御方法
1か月前
CAPXLE株式会社
緊急避難用気球
5か月前
CAPXLE株式会社
緊急避難用気球
5か月前
株式会社E・C・R
無人飛翔体
12か月前
CAPXLE株式会社
緊急避難用気球
5か月前
京セラ株式会社
発着装置
6か月前
株式会社JVCケンウッド
撮像システム
6か月前
株式会社FINEMECH
連結型回転翼航空機
5か月前
株式会社デンソー
推進装置
3か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ