TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2023162553
公報種別
公開特許公報(A)
公開日
2023-11-09
出願番号
2022072948
出願日
2022-04-27
発明の名称
撮像システム
出願人
株式会社JVCケンウッド
代理人
個人
主分類
B64F
1/12 20060101AFI20231101BHJP(航空機;飛行;宇宙工学)
要約
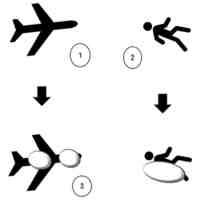
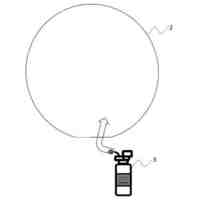
【課題】無人飛行体による移動体の撮像を適切に行う技術を提供する。
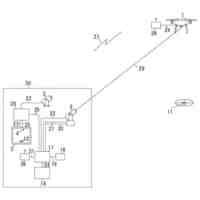
【解決手段】無人飛行体離発着ドック200は、車両10に対してしきい値以上の加速度が加わった場合、加速度が加わった方向とは逆方向に無人飛行体100の係止を解除する。無人飛行体100の加速度検出部がしきい値以上の加速度を検出した場合、無人飛行体100の飛行制御部は、無人飛行体100が上昇するように無人飛行体100の飛行を制御する。また、無人飛行体100は、撮像部による撮像を開始し、取得した撮像データの送信を開始する。
【選択図】図1
特許請求の範囲
【請求項1】
飛行可能な無人飛行体と、移動体において前記無人飛行体を係止可能な無人飛行体離発着ドックとを備える撮像システムであって、
前記無人飛行体離発着ドックは、前記移動体に対してしきい値以上の加速度が加わった場合、加速度が加わった方向とは逆方向に前記無人飛行体の係止を解除し、
前記無人飛行体は、
前記無人飛行体の飛行を制御する飛行制御部と、
前記無人飛行体の少なくとも下方向を含む範囲を撮像する撮像部と、
前記撮像部による撮像を制御し、撮像データを取得する撮像制御部と、
前記撮像制御部が取得した撮像データを他の装置に送信する通信制御部と、
前記無人飛行体に対する加速度を検出する加速度検出部と、
を備え、
前記加速度検出部がしきい値以上の加速度を検出した場合、
前記飛行制御部は、前記無人飛行体が上昇するように前記無人飛行体の飛行を制御し、
前記撮像制御部は、前記撮像部による撮像を開始し、
前記通信制御部は、前記撮像制御部が取得した撮像データの送信を開始する、
撮像システム。
続きを表示(約 820 文字)
【請求項2】
飛行可能な無人飛行体と、移動体において前記無人飛行体を係止可能な無人飛行体離発着ドックとを備える撮像システムであって、
前記無人飛行体離発着ドックは、前記移動体に対してしきい値以上の加速度が加わった場合、加速度が加わった方向とは逆方向に前記無人飛行体の係止を解除し、
前記無人飛行体は、
前記無人飛行体の飛行を制御する飛行制御部と、
前記無人飛行体の少なくとも下方向を含む範囲を撮像する撮像部と、
前記撮像部による撮像を制御し、撮像データを取得する撮像制御部と、
前記撮像制御部が取得した撮像データを他の装置に送信する通信制御部と、
前記無人飛行体離発着ドックによる係止の解除を検出する係止検出部と、
を備え、
前記係止検出部が係止の解除を検出した場合、
前記飛行制御部は、前記無人飛行体が上昇するように前記無人飛行体の飛行を制御し、
前記撮像制御部は、前記撮像部による撮像を開始し、
前記通信制御部は、前記撮像制御部が取得した撮像データの送信を開始する、
撮像システム。
【請求項3】
前記無人飛行体離発着ドックは、前記移動体の前後方向にしきい値以上の加速度が加わった場合、加速度が加わった方向とは逆方向に前記無人飛行体の係止を解除する、
請求項1または2に記載の撮像システム。
【請求項4】
前記移動体の前後方向に加わるしきい値以上の加速度は、前記移動体の急制動または衝突に該当する加速度である、
請求項3に記載の撮像システム。
【請求項5】
前記飛行制御部は、前記撮像制御部が前記撮像部による撮像を開始した後、前記移動体から所定距離および所定高度を維持した状態となるように前記無人飛行体の飛行を制御する、
請求項1または2に記載の撮像システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、撮像技術に関し、特に移動体を撮像する撮像システムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
上空を自由に飛行し、かつ上空から地表面上の移動体を撮像するドローン等の無人飛行体の開発が進められている。移動体と無人飛行体との間の距離が一定の距離に保たれると、移動中の移動体を所望の撮像位置から撮影できない可能性がある。そのため、移動体の移動状態に基づいて撮像が制御される(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2021-142819号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
移動体を撮像可能な無人飛行体は、例えば移動体において衝突事故等が発生した場合に当該移動体を撮像するために使用される。そのような無人飛行体の離発着を適切に制御することが望まれる。
【0005】
本発明はこうした状況に鑑みてなされたものであり、その目的は、無人飛行体による移動体の撮像を適切に行う技術を提供することである。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明のある態様の撮像システムは、飛行可能な無人飛行体と、移動体において無人飛行体を係止可能な無人飛行体離発着ドックとを備える撮像システムであって、無人飛行体離発着ドックは、移動体に対してしきい値以上の加速度が加わった場合、加速度が加わった方向とは逆方向に無人飛行体の係止を解除し、無人飛行体は、無人飛行体の飛行を制御する飛行制御部と、無人飛行体の少なくとも下方向を含む範囲を撮像する撮像部と、撮像部による撮像を制御し、撮像データを取得する撮像制御部と、撮像制御部が取得した撮像データを他の装置に送信する通信制御部と、無人飛行体に対する加速度を検出する加速度検出部と、を備える。加速度検出部がしきい値以上の加速度を検出した場合、飛行制御部は、無人飛行体が上昇するように無人飛行体の飛行を制御し、撮像制御部は、撮像部による撮像を開始し、通信制御部は、撮像制御部が取得した撮像データの送信を開始する。
【0007】
本発明の別の態様もまた、撮像システムである。この撮像システムは、飛行可能な無人飛行体と、移動体において無人飛行体を係止可能な無人飛行体離発着ドックとを備える撮像システムであって、無人飛行体離発着ドックは、移動体に対してしきい値以上の加速度が加わった場合、加速度が加わった方向とは逆方向に無人飛行体の係止を解除し、無人飛行体は、無人飛行体の飛行を制御する飛行制御部と、無人飛行体の少なくとも下方向を含む範囲を撮像する撮像部と、撮像部による撮像を制御し、撮像データを取得する撮像制御部と、撮像制御部が取得した撮像データを他の装置に送信する通信制御部と、無人飛行体離発着ドックによる係止の解除を検出する係止検出部と、を備える。係止検出部が係止の解除を検出した場合、飛行制御部は、無人飛行体が上昇するように無人飛行体の飛行を制御し、撮像制御部は、撮像部による撮像を開始し、通信制御部は、撮像制御部が取得した撮像データの送信を開始する。
【0008】
なお、以上の構成要素の任意の組合せ、本発明の表現を方法、装置、システム、記録媒体、コンピュータプログラムなどの間で変換したものもまた、本発明の態様として有効である。
【発明の効果】
【0009】
本発明によれば、無人飛行体による移動体の撮像を適切に行うことができる。
【図面の簡単な説明】
【0010】
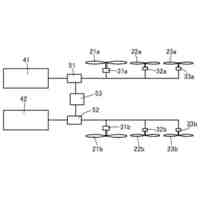
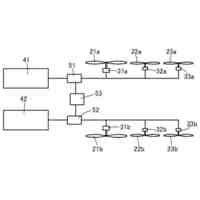
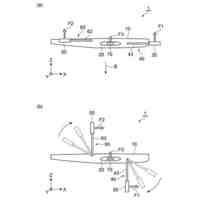
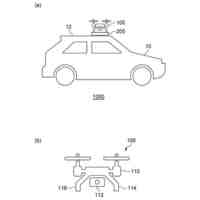
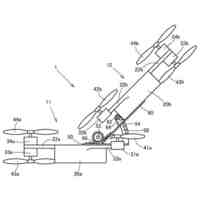
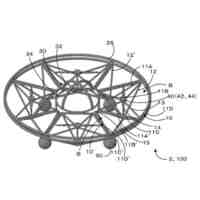
図1(a)-(b)は、実施例1に係る撮像システムの外観を示す図である。
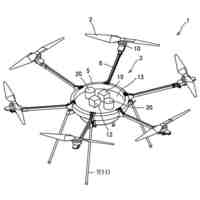
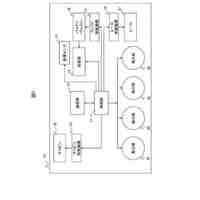
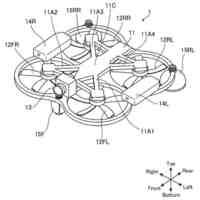
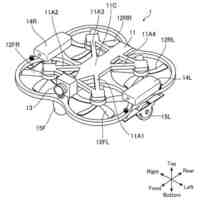
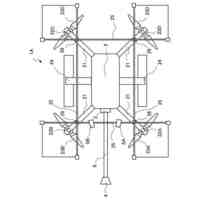
図1(a)-(b)における無人飛行体の構成を示す図である。
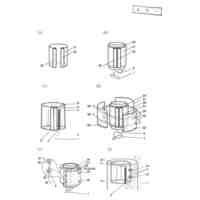
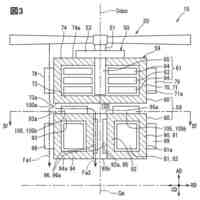
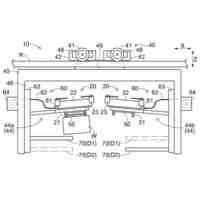
図3(a)-(b)は、図1(a)の無人飛行体離発着ドックの動作概要を示す図である。
図4(a)-(b)は、図1(a)-(b)における無人飛行体の飛行軌跡を示す図である。
図2の無人飛行体による動作手順を示すフローチャートである。
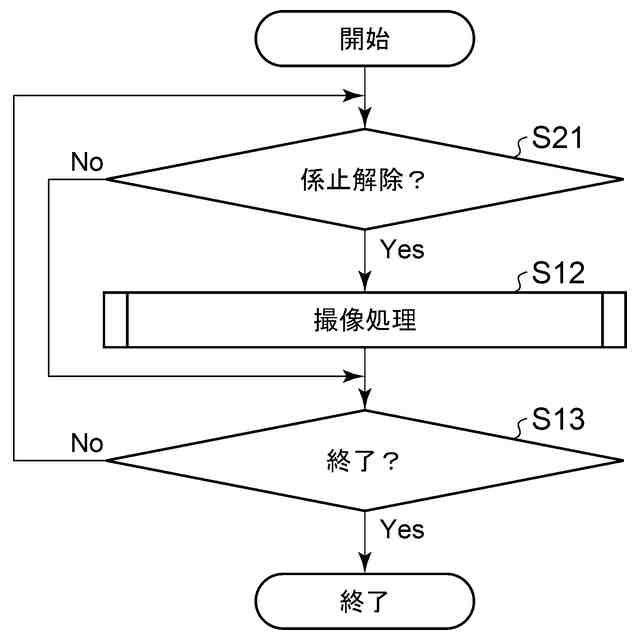
図2の無人飛行体による撮像処理の手順を示すフローチャートである。
実施例2に係る無人飛行体の構成を示す図である。
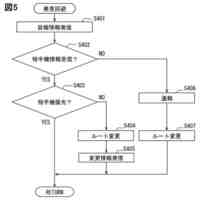
図7の無人飛行体による動作手順を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行体
1か月前
個人
ドローン係留装置
3か月前
個人
ドローンの計測飛行方法
6か月前
個人
マルチコプター型電気飛行機
27日前
個人
人工衛星推進材循環エンジン
5日前
個人
マルチコプター
11か月前
個人
自由落下運航システム
1か月前
合同会社アドエア
飛行体落下補助装置
8か月前
合同会社アドエア
飛行体落下補助装置
3か月前
株式会社FINEMECH
回転翼航空機
10か月前
株式会社FINEMECH
回転翼航空機
10か月前
個人
飛行体
3か月前
河村電器産業株式会社
設備点検システム
5か月前
個人
転落・墜落時事故防止用エアバッグ
11か月前
個人
気球及び温暖化防止システム
12か月前
株式会社中北製作所
羽ばたき装置
12日前
中国電力株式会社
物資運搬ドローン
8か月前
国立大学法人九州大学
飛行体
2か月前
SkyDeer株式会社
衛星制御方法
1か月前
CAPXLE株式会社
緊急避難用気球
5か月前
CAPXLE株式会社
緊急避難用気球
5か月前
株式会社E・C・R
無人飛翔体
12か月前
CAPXLE株式会社
緊急避難用気球
5か月前
京セラ株式会社
発着装置
6か月前
株式会社JVCケンウッド
撮像システム
6か月前
株式会社FINEMECH
連結型回転翼航空機
5か月前
株式会社デンソー
推進装置
3か月前
個人
ドローン
11か月前
個人
ドローン
9か月前
トヨタ自動車株式会社
飛行体
7か月前
株式会社エムアイエー
機体フレーム
3か月前
旭ビルウォール株式会社
移動システム
4か月前
株式会社岩谷技研
気球
1か月前
株式会社デンソー
飛行制御装置
12か月前
株式会社ダイフク
搬送システム
1か月前
日鉄テクノロジー株式会社
ドローン測定装置
5か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ