TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024008224
公報種別
公開特許公報(A)
公開日
2024-01-19
出願番号
2022109919
出願日
2022-07-07
発明の名称
飛行体
出願人
個人
代理人
弁理士法人湘洋特許事務所
主分類
B64C
17/02 20060101AFI20240112BHJP(航空機;飛行;宇宙工学)
要約
【課題】 高層建物のベランダ等のような梯子消防車やヘリコプタが接近できない場所に接近して活動できる飛行体を実現する。
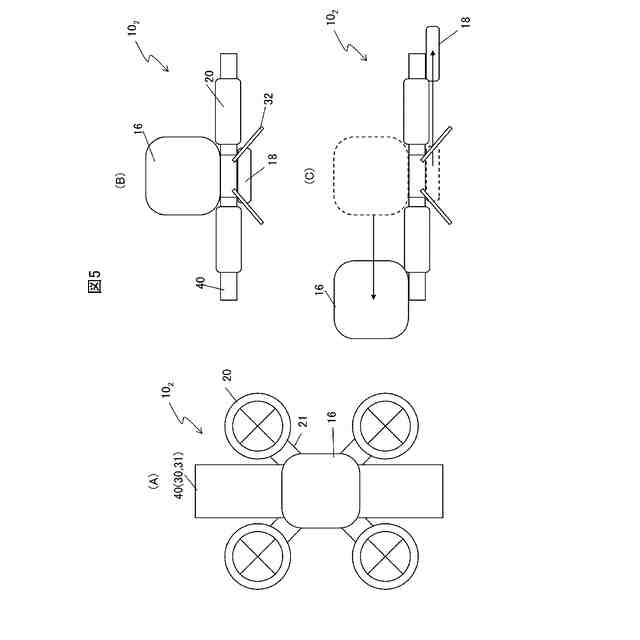
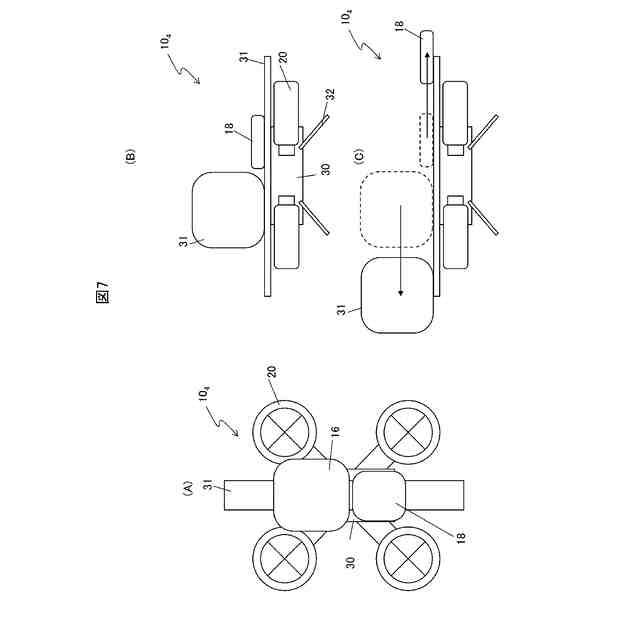
【解決手段】 飛行体は、揚力、及び推進力を発生させる動力部と、積載物を積載するための第1積載部と、前記第1積載部を移動させる第1積載部移動機構と、ウェイトと、前記ウェイトを移動させるウェイト移動機構と、前記第1積載部移動機構を制御して前記第1積載部を移動させ、前記ウェイト移動機構を制御して前記ウェイトを移動させる制御部と、を備える。
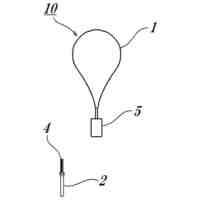
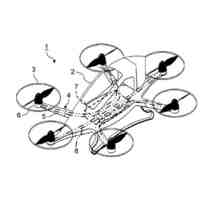
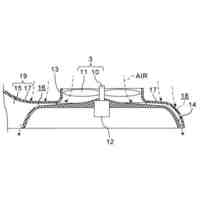
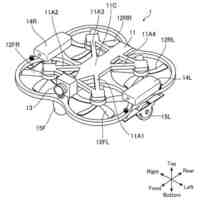
【選択図】 図1
特許請求の範囲
【請求項1】
揚力、及び推進力を発生させる動力部と、
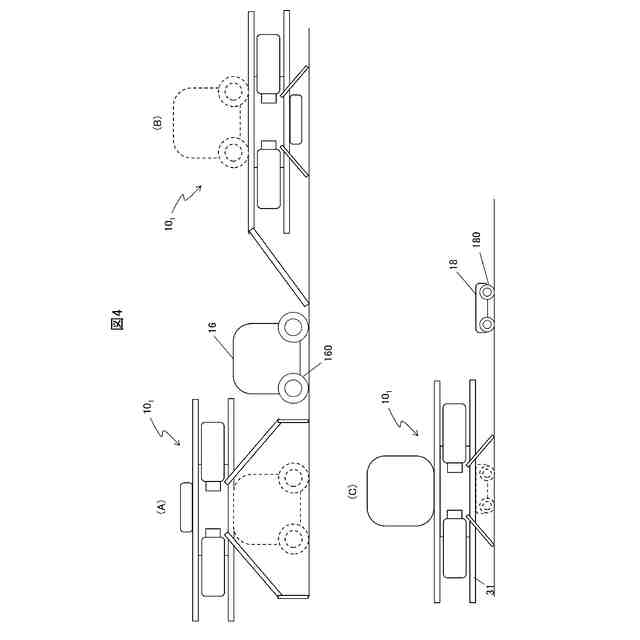
積載物を積載するための第1積載部と、
前記第1積載部を移動させる第1積載部移動機構と、
ウェイトと、
前記ウェイトを移動させるウェイト移動機構と、
前記第1積載部移動機構を制御して前記第1積載部を移動させ、前記ウェイト移動機構を制御して前記ウェイトを移動させる制御部と、
を備える飛行体。
続きを表示(約 940 文字)
【請求項2】
請求項1に記載の飛行体であって、
前記制御部は、前記ウェイト移動機構を制御して前記第1積載部の移動に対応するカウンタウェイトとして前記ウェイトを移動させる
飛行体。
【請求項3】
請求項1に記載の飛行体であって、
前記ウェイトは、前記飛行体に電力を供給するバッテリが兼ねる
飛行体。
【請求項4】
請求項3に記載の飛行体であって、
前記バッテリは、前記飛行体に着脱自在であって自走機構を有する
飛行体。
【請求項5】
請求項1に記載の飛行体であって、
前記第1積載部は、前記飛行体に着脱自在であって自走機構を有する
飛行体。
【請求項6】
請求項1~5のいずれか一項に記載の飛行体であって、
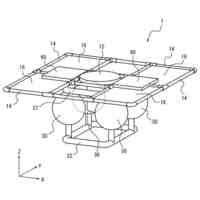
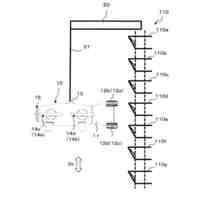
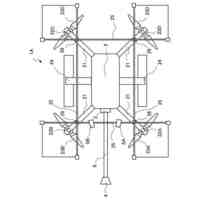
本体、及び前記本体に接続されたレール、を備え、
前記レールは、前記本体、及び前記本体の周囲に配置された複数の前記動力部よりも突出しており、
前記第1積載部移動機構は、前記第1積載部を前記レールに沿って第1の方向に移動させ、
前記ウェイト移動機構は、前記ウェイトを前記レールに沿って第1の方向と反対の第2の方向に移動させる
飛行体。
【請求項7】
請求項6に記載の飛行体であって、
前記レールは、伸縮自在である
飛行体。
【請求項8】
請求項6に記載の飛行体であって、
前記レールの一端に前記飛行体を係留するための第1の接続部材、を備える
飛行体。
【請求項9】
請求項8に記載の飛行体であって、
前記レールの他端に、他の飛行体の接続部材と接続する第2の接続部材、を備える
飛行体。
【請求項10】
請求項1に記載の飛行体であって、
前記ウェイトは、積載物を積載するための第2積載部であり、
前記制御部は、前記ウェイト移動機構を制御して、前記第1積載部の移動に対応するカウンタウェイトとして前記第2積載部を移動させる
飛行体。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、飛行体に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
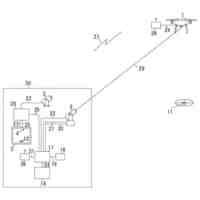
いわゆるタワーマンションに象徴される高層建物が数多く建築されている。高層建物における災害等発生時の救助には、梯子消防車の利用が想定されている。しかしながら、梯子消防車は、移動ルートや設置場所に制限があるために活動できるエリアが限られる。また、梯子を伸ばせる高さが40m程(住宅の13階相当)であるため、救助可能な高さが建物の高層化に追いついていない。
【0003】
梯子消防車の他、高層建物における救助活動に利用可能なものとしては、例えば、ヘリコプタやドローン(無人航空機)等が考えられる。ヘリコプタの場合、高層建物の屋上に設けられているヘリポートやレスキュースペースにて救助を行うことになる。ただし、高層建物内において住民が屋上まで辿り着けずに、高層建物のベランダや窓から救助を行う必要がある場合も想定されるが、この場合、ヘリコプタではロータが建物に干渉(接触)するため対応できない。
【0004】
救助活動に用いるドローンに関しては、例えば、特許文献1に「ドローン本体と、該ドローン本体に対して着脱自在に格納される人を収容する人収容部と、該人収容部に連結されたロープと、該ドローン本体に装着され該ロープを巻き上げることにより該人収容部をドローン本体に収容し、且つ該ロープを巻き下げることで該人収容部を該ドローン本体から離脱させることが可能なロープ巻取手段と、を少なくとも備える有人ドローン」が記載されている。
【先行技術文献】
【特許文献】
【0005】
特開2017-104365号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載の有人ドローンの他、要救助者を収容して搬送するドローンは数多く提案されている。しかしながら、いずれのドローンもホバリング(空中停止)した状態で要救助者を吊り上げて収容する構造である。このため、高層建物のベランダや窓に居る要救助者をドローンの側方から収容することができない。
【0007】
また、仮に従来のドローンを大型化して、高層建物のベランダや窓にドローンを接近させ、要救助者をドローンの側方から収容しようとした場合、収容の際にドローンの重量バランスが崩れてホバリングが不安定となり、救助活動を安全に実施できないと考えられる。
【0008】
本発明は、このような状況に鑑みてなされたものであり、高層建物のベランダ等のような梯子消防車やヘリコプタが接近できない場所に接近して活動できる飛行体の実現を目的とする。
【課題を解決するための手段】
【0009】
本願は、上記課題の少なくとも一部を解決する手段を複数含んでいるが、その例を挙げるならば、以下のとおりである。
【0010】
上記課題を解決すべく、本発明の一態様に係る飛行体は、揚力、及び推進力を発生させる動力部と、積載物を積載するための第1積載部と、前記第1積載部を移動させる第1積載部移動機構と、ウェイトと、前記ウェイトを移動させるウェイト移動機構と、前記第1積載部移動機構を制御して前記第1積載部を移動させ、前記ウェイト移動機構を制御して前記ウェイトを移動させる制御部と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行体
3か月前
個人
ドローン係留装置
6か月前
個人
空港用貨物搬送車
1か月前
個人
ドローンの計測飛行方法
8か月前
個人
飛行艇
9日前
個人
マルチコプター型電気飛行機
3か月前
個人
自由落下運航システム
4か月前
個人
人工衛星推進材循環エンジン
2か月前
合同会社アドエア
飛行体落下補助装置
5か月前
合同会社アドエア
飛行体落下補助装置
11か月前
個人
飛行体
6か月前
株式会社セネック
ドローンポート
1か月前
株式会社セネック
ドローンポート
1か月前
河村電器産業株式会社
設備点検システム
8か月前
株式会社中北製作所
羽ばたき装置
2か月前
株式会社SUBARU
電動航空機
2か月前
株式会社中北製作所
羽ばたき装置
2か月前
中国電力株式会社
物資運搬ドローン
11か月前
国立大学法人九州大学
飛行体
4か月前
株式会社SUBARU
回転翼航空機
2か月前
CAPXLE株式会社
緊急避難用気球
7か月前
CAPXLE株式会社
緊急避難用気球
7か月前
SkyDeer株式会社
衛星制御方法
4か月前
京セラ株式会社
発着装置
9か月前
CAPXLE株式会社
緊急避難用気球
7か月前
株式会社デンソー
推進装置
6か月前
株式会社JVCケンウッド
撮像システム
8か月前
株式会社FINEMECH
連結型回転翼航空機
8か月前
個人
ドローン
11か月前
株式会社エムアイエー
機体フレーム
5か月前
トヨタ自動車株式会社
飛行体
10か月前
個人
回転翼飛行体
2日前
日鉄テクノロジー株式会社
ドローン測定装置
7か月前
旭ビルウォール株式会社
移動システム
7か月前
日鉄テクノロジー株式会社
ドローン測定装置
7か月前
株式会社岩谷技研
気球
3か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ