TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2023112709
公報種別
公開特許公報(A)
公開日
2023-08-15
出願番号
2022014569
出願日
2022-02-02
発明の名称
ドローン
出願人
個人
代理人
弁理士法人山王内外特許事務所
主分類
B64C
25/06 20060101AFI20230807BHJP(航空機;飛行;宇宙工学)
要約
【課題】埃の舞い込みを抑制して撮像をすることが可能となるようなドローンを提供する。
【解決手段】本体部11と、本体部11を支持する複数の脚部15F、15Lであって、第1の種類の脚部15Fおよび第1の種類と異なる第2の種類の脚部15Lを含む複数の脚部15F、15Lと、本体部11に揚力または推進力を発生させるプロペラ12と、を備えたドローンであって、第1の種類の脚部15Fは、回転しない制動部材でできた脚部であって、第1の長さを有する少なくとも1つの脚部を含み、第2の種類の脚部15Lは、ドローンが着地または着床した状態において、ドローンの前後方向への移動を許容する回転体をそれぞれ備えた、第2の長さを有する2つの脚部であって、前後方向と直交する左右方向に沿って、ドローンの左側に設けられた左側脚部と、ドローンの右側に設けられた右側脚部とを備え、第1の長さよりも第2の長さの方が長い。
【選択図】図1
特許請求の範囲
【請求項1】
本体部と、
前記本体部を支持する複数の脚部であって、第1の種類の脚部および前記第1の種類と異なる第2の種類の脚部を含む複数の脚部と、
前記本体部に揚力または推進力を発生させるプロペラと、
を備えたドローンであって、
前記第1の種類の脚部は、回転しない制動部材でできた脚部であって、第1の長さを有する第1の脚部を含む少なくとも1つの脚部を含み、
前記第2の種類の脚部は、前記ドローンが着地または着床した状態において、前記ドローンの前後方向への移動を許容する回転体をそれぞれ備えた第2の長さを有する2つの脚部であって、前記2つの脚部は、前記前後方向と直交する左右方向に沿って、前記ドローンの左側に設けられた左側脚部と前記ドローンの右側に設けられた右側脚部とのみを備え、
前記第1の長さよりも前記第2の長さの方が長い、
ドローン。
続きを表示(約 620 文字)
【請求項2】
前記回転体は樹脂でできている、請求項1に記載されたドローン。
【請求項3】
前記樹脂はナイロンである、請求項2に記載されたドローン。
【請求項4】
前記左側脚部および前記右側脚部は、前記ドローンの前後方向に沿って前記ドローンの中央部に配置されている、請求項1から3のいずれか1つに記載されたドローン。
【請求項5】
前記回転体は切り欠かれた角部を有する、請求項1から4のいずれか1つに記載されたドローン。
【請求項6】
前記回転体はRが付けられた角部を有する、請求項1から4のいずれか1つに記載されたドローン。
【請求項7】
画像を撮像するカメラを更に備えた、請求項1から6のいずれか1項に記載されたドローン。
【請求項8】
平面視において前記本体部の中央部から前記第1の脚部を望む方向が、前記カメラの画角内に含まれるように前記カメラが配置されている、請求項7に記載されたドローン。
【請求項9】
前記第1の脚部は前記左側脚部および前記右側脚部よりも前方に配置されている、請求項8に記載されたドローン。
【請求項10】
前記第1の脚部は前記左側脚部および前記右側脚部よりも前方に配置され、
前記カメラは前記第1の脚部の鉛直上方に配置されている、請求項7に記載されたドローン。
発明の詳細な説明
【技術分野】
【0001】
本開示はドローンに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
ドローンを利用して建物にクラック等の不具合が発生していないかを調査する試みがなされている。例えば、特許文献1には、床下や屋根裏などの建物内部の狭い空間内にカメラが搭載されたドローンを飛行させて画像を撮像し、撮像した画像を確認することで建物を調査する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-69833号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、床下や屋根裏などの狭隘空間には多くの埃が溜まっているため、従来技術1のような技術を用いて狭隘空間の画像を撮像しても、撮像画像に埃が映り込み、良好な画像が得られないという問題があった。
【0005】
本開示はこのような問題を解決するためになされたものであり、実施形態の一側面は、埃の舞い込みを抑制して撮像をすることが可能となるようなドローンを提供することを目的とする。
【課題を解決するための手段】
【0006】
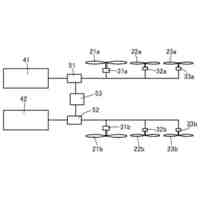
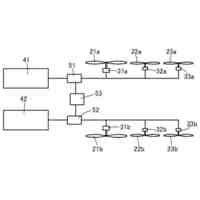
実施形態によるドローンの一側面は、本体部と、前記本体部を支持する複数の脚部であって、第1の種類の脚部および前記第1の種類と異なる第2の種類の脚部を含む複数の脚部と、前記本体部に揚力または推進力を発生させるプロペラと、を備えたドローンであって、前記第1の種類の脚部は、回転しない制動部材でできた脚部であって、第1の長さを有する第1の脚部を含む少なくとも1つの脚部を含み、前記第2の種類の脚部は、前記ドローンが着地または着床した状態において、前記ドローンの前後方向への移動を許容する回転体をそれぞれ備えた第2の長さを有する2つの脚部であって、前記2つの脚部は、前記前後方向と直交する左右方向に沿って、前記ドローンの左側に設けられた左側脚部と前記ドローンの右側に設けられた右側脚部とのみを備え、前記第1の長さよりも前記第2の長さの方が長い。
【発明の効果】
【0007】
実施形態によるドローンの一側面によれば、ドローンは、ドローンが着地または着床した状態においてプロペラの回転により発生する風の流れを一定の方向に限定しながら任意の移動することが可能であるので、プロペラの風により埃が舞う空間を限定することができる。したがって、埃の舞い込みを抑制して撮像をすることが可能となる。
【図面の簡単な説明】
【0008】
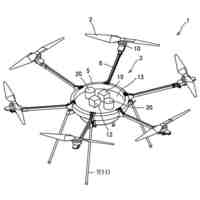
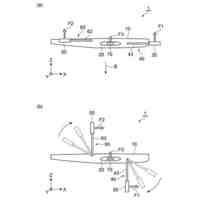
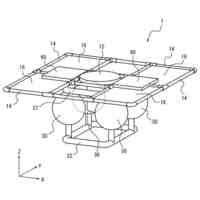
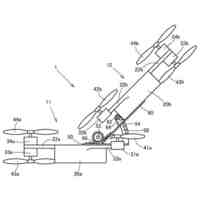
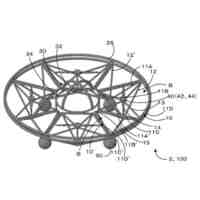
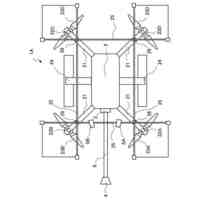
実施形態によるドローンの斜視図である。
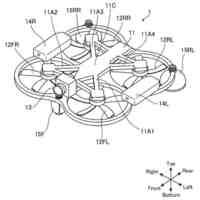
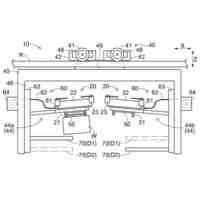
実施形態によるドローンの底面図である。
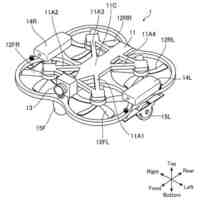
実施形態によるドローンの正面図である。
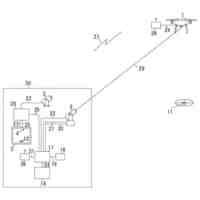
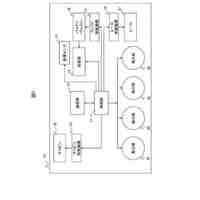
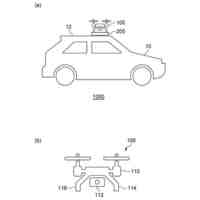
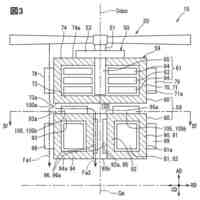
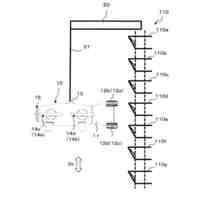
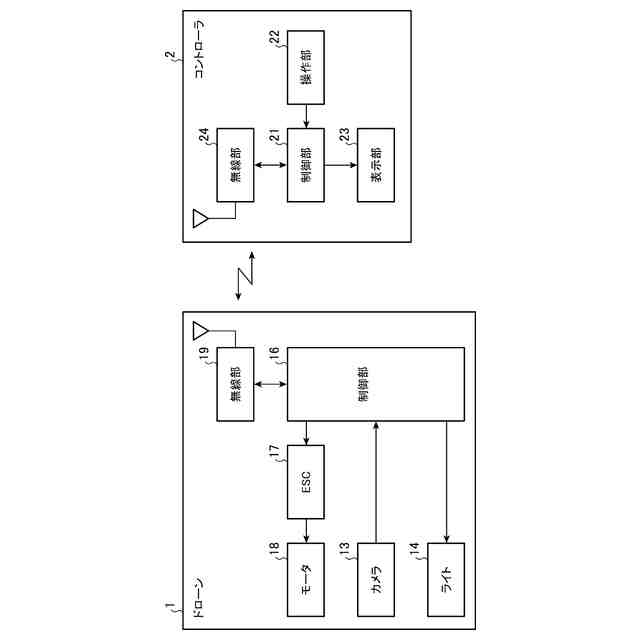
ドローンおよびコントローラの構成例を示す図である。
【発明を実施するための形態】
【0009】
以下、添付の図面を参照しつつ、本開示に係る種々の実施形態について説明する。なお、図面全体を通じて同一符号を付された構成要素は、同一又は類似の構成又は機能を有するものとする。
【0010】
<システム構成>
図1は本開示に係るドローン1の斜視図であり、図2はドローン1の底面図であり、図3はドローン1の正面図である。ドローン1は、図4に示されているように、コントローラ2により送信された操縦信号に従って遠隔操作される。遠隔操作には、目視内飛行および目視外飛行が含まれる。遠隔操作によりドローン1は飛行または走行をするとともに、ドローン1のカメラ13により撮像された画像がコントローラ2に送信される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行体
1か月前
個人
ドローン係留装置
3か月前
個人
ドローンの計測飛行方法
6か月前
個人
マルチコプター型電気飛行機
27日前
個人
人工衛星推進材循環エンジン
5日前
個人
マルチコプター
11か月前
個人
自由落下運航システム
1か月前
合同会社アドエア
飛行体落下補助装置
8か月前
合同会社アドエア
飛行体落下補助装置
3か月前
株式会社FINEMECH
回転翼航空機
10か月前
株式会社FINEMECH
回転翼航空機
10か月前
個人
飛行体
3か月前
河村電器産業株式会社
設備点検システム
5か月前
個人
転落・墜落時事故防止用エアバッグ
11か月前
個人
気球及び温暖化防止システム
12か月前
株式会社中北製作所
羽ばたき装置
12日前
中国電力株式会社
物資運搬ドローン
8か月前
国立大学法人九州大学
飛行体
2か月前
SkyDeer株式会社
衛星制御方法
1か月前
CAPXLE株式会社
緊急避難用気球
5か月前
CAPXLE株式会社
緊急避難用気球
5か月前
株式会社E・C・R
無人飛翔体
12か月前
CAPXLE株式会社
緊急避難用気球
5か月前
京セラ株式会社
発着装置
6か月前
株式会社JVCケンウッド
撮像システム
6か月前
株式会社FINEMECH
連結型回転翼航空機
5か月前
株式会社デンソー
推進装置
3か月前
個人
ドローン
11か月前
個人
ドローン
9か月前
トヨタ自動車株式会社
飛行体
7か月前
株式会社エムアイエー
機体フレーム
3か月前
旭ビルウォール株式会社
移動システム
4か月前
株式会社岩谷技研
気球
1か月前
株式会社デンソー
飛行制御装置
12か月前
株式会社ダイフク
搬送システム
1か月前
日鉄テクノロジー株式会社
ドローン測定装置
5か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ