TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024055542
公報種別
公開特許公報(A)
公開日
2024-04-18
出願番号
2022162561
出願日
2022-10-07
発明の名称
移載システム、並びにその制御方法および制御プログラム
出願人
株式会社ダイフク
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
B65G
1/137 20060101AFI20240411BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】物品の保持または移載に失敗した場合に該失敗の復旧作業を迅速に行う。
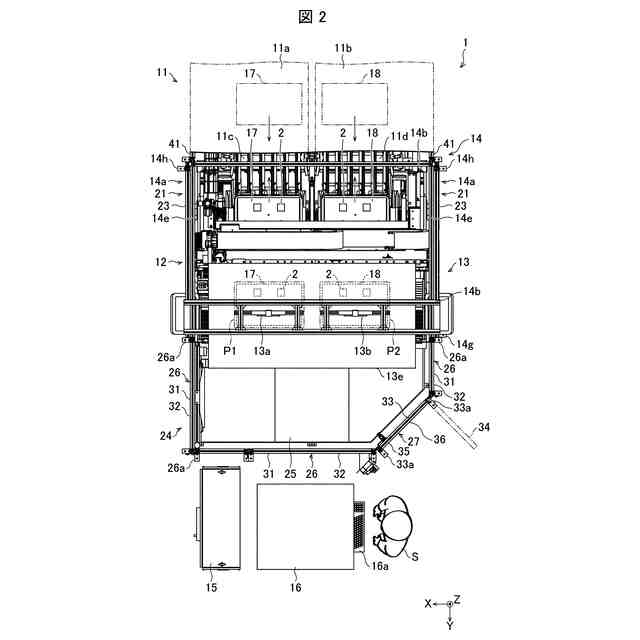
【解決手段】移載システム(1)は、物品を搬送する搬送部(11)と、搬送部(11)の一端側に設置され、物品(2)を保持して移載する移載部(12)と、物品(2)を撮影して撮影画像を作成するカメラ部(13)と、撮影画像に基づいて移載部(12)を制御する自動移載と、作業者(S)の指示に基づいて移載部(12)を制御する手動移載とを実行可能な制御部(15)と、を備える。
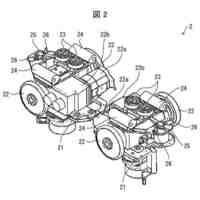
【選択図】図2
特許請求の範囲
【請求項1】
物品を搬送する搬送部と、
前記搬送部の一端側に設置され、前記物品を保持して移載する移載部と、
前記物品を撮影して撮影画像を作成するカメラ部と、
前記撮影画像に基づいて前記移載部を制御する自動移載と、作業者の指示に基づいて前記移載部を制御する手動移載とを実行可能な制御部と、を備える移載システム。
続きを表示(約 1,000 文字)
【請求項2】
前記作業者の指示が入力される入力部と、
前記撮影画像を表示する表示部と、をさらに備える、請求項1に記載の移載システム。
【請求項3】
前記撮影画像のデータを前記表示部に送信すると共に、前記指示を示す指示データを前記入力部から受信する通信部をさらに備える、請求項2に記載の移載システム。
【請求項4】
前記カメラ部は、前記物品の移載元および移載先の両方を撮影し、
前記表示部は、前記移載元の撮影画像と、前記移載先の撮影画像との両方を表示する、請求項2または3に記載の移載システム。
【請求項5】
前記カメラ部において、前記制御部が利用する撮影画像と、前記表示部が表示する撮影画像とは、同じカメラで作成される、請求項2または3に記載の移載システム。
【請求項6】
前記カメラ部において、前記制御部が利用する撮影画像と、前記表示部が表示する撮影画像とは、異なるカメラで作成される、請求項2または3に記載の移載システム。
【請求項7】
前記制御部は、前記自動移載において、前記移載部が前記物品の保持または移載を所定回数失敗した場合、前記手動移載に切り替える、請求項1から3の何れか1項に記載の移載システム。
【請求項8】
前記制御部は、前記自動移載と前記手動移載とを、切替えを示す、前記作業者の切替指示に基づいて切り替える、請求項1から3の何れか1項に記載の移載システム。
【請求項9】
前記移載部は、
前記物品を保持するピッキングヘッドと、
前記ピッキングヘッドを昇降させると共に、平面視において前記ピッキングヘッドを2方向へ移動させる駆動部と、
を含む請求項1から3の何れか1項に記載の移載システム。
【請求項10】
物品を搬送する搬送部と、前記搬送部の一端側に設置され、前記物品を保持して移載する移載部と、前記物品を撮影して撮影画像を作成するカメラ部と、を備える移載システムの制御方法であって、
前記撮影画像に基づいて前記移載部を制御する自動移載と、作業者からの指示に基づいて前記移載部を制御する手動移載とを切り替えるステップを含む、移載システムの制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、物流における物品の移載システム、並びにその制御方法および制御プログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、物流倉庫等においては、多種多量の物品を効率よく出荷先別に出荷容器へ選別仕分けするために、ロボットアーム等のピッキング装置(移載装置)を備える移載システムが用いられている。この種の移載システムに関し、特許文献1には、上記ピッキング装置が物品を自動的に移載する自動移載と、作業者が自身の手を用いて物品を移載する手作業移載と、を実行できる構成が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-070143号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記の構成の場合、上記自動移載にて、上記ピッキング装置が物品の保持または移載に失敗した場合、上記自動移載から上記手作業移載に切り替えて、上記失敗の復旧作業を行うことになる。このとき、上記ピッキング装置と上記作業者とが接触する可能性がある危険空間から上記ピッキング装置を退避させた後、保持または移載に失敗した物品を上記作業者が上記手作業移載により保持して移載することになる。そして、上記手作業移載が完了した場合、上記危険空間から上記作業者が退避した後、上記自動移載に戻ることになる。このように、上記自動移載と上記手作業移載との切替えには、作業者の安全確保のための時間がかかることになる。
【0005】
本発明の一態様は、物品の保持または移載に失敗した場合に該失敗の復旧作業を迅速に行うことができる移載システム等を実現することを目的とする。
【課題を解決するための手段】
【0006】
上記の課題を解決するために、本発明の一態様に係る移載システムは、物品を搬送する搬送部と、前記搬送部の一端側に設置され、前記物品を保持して移載する移載部と、前記物品を撮影して撮影画像を作成するカメラ部と、前記撮影画像に基づいて、或いは、作業者の指示に基づいて、前記移載部を制御する制御部と、を備える。
【0007】
また、本発明の他の態様に係る制御方法は、物品を搬送する搬送部と、前記搬送部の一端側に設置され、前記物品を保持して移載する移載部と、前記物品を撮影して撮影画像を作成するカメラ部と、を備える移載システムの制御方法であって、前記撮影画像に基づいて前記移載部を制御する自動移載と、作業者からの指示に基づいて前記移載部を制御する手動移載とを切り替えるステップを含む。
【発明の効果】
【0008】
本発明の一態様によれば、物品の保持または移載に失敗した場合に該失敗の復旧作業を迅速に行うことができる。
【図面の簡単な説明】
【0009】
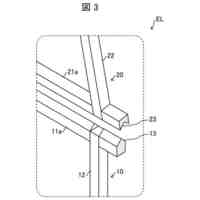
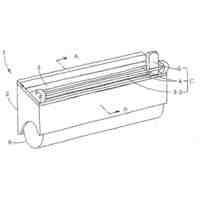
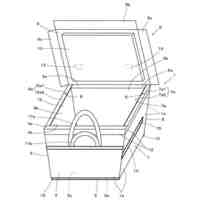
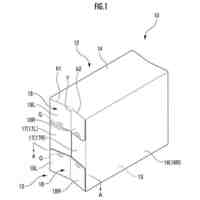
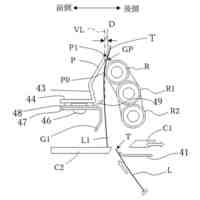
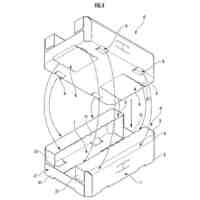
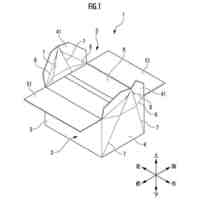
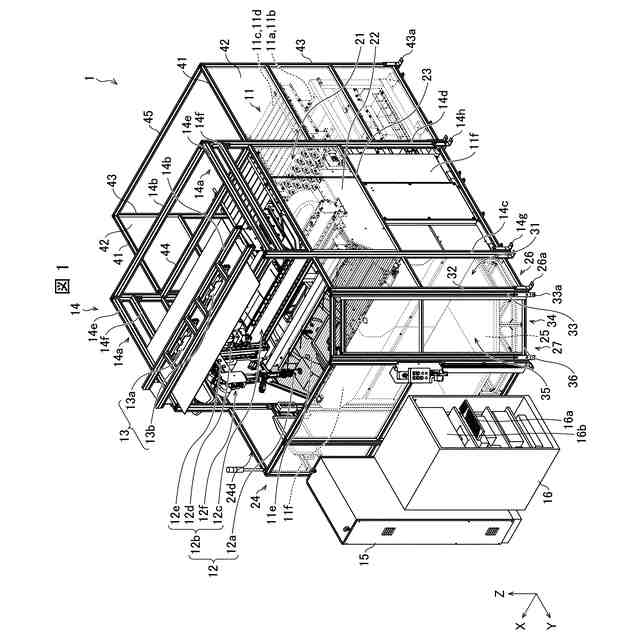
本発明の一実施形態に係る移載システムの概要を示す斜視図である。
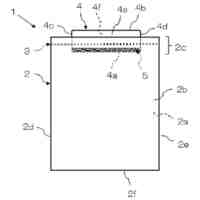
上記移載システムの概要を示す平面図である。
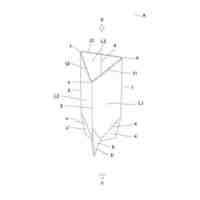
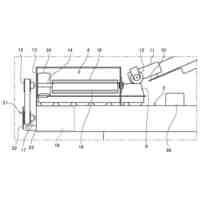
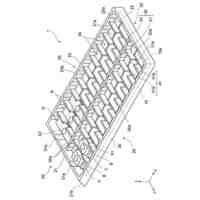
上記移載システムにおける搬送部および移載部による動作の一例を示す図である。
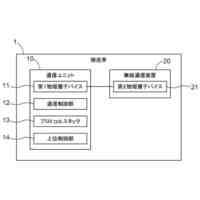
上記移載システムの概要を示すブロック図である。
上記移載システムの制御部における自動移載の処理の一例を示すフローチャートである。
上記制御部における手動移載の処理の一例を示すフローチャートである。
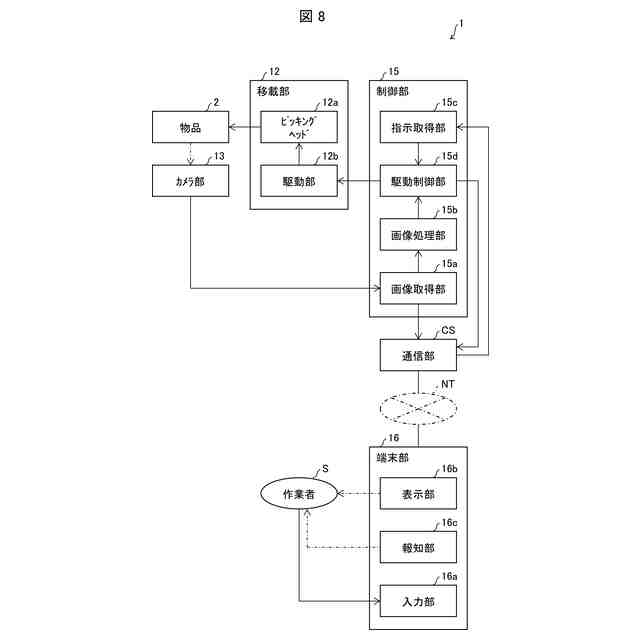
本発明の別の実施形態に係る移載システムの概要を示すブロック図である。
本発明の他の実施形態に係る移載システムの概要を示すブロック図である。
【発明を実施するための形態】
【0010】
以下、本発明の実施の形態について、詳細に説明する。なお、説明の便宜上、各実施形態に示した部材と同一の機能を有する部材については、同一の符号を付記し、適宜その説明を省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ダイフク
組立棚
12日前
株式会社ダイフク
物品搬送設備
5日前
株式会社ダイフク
データ作成装置
5日前
株式会社ダイフク
走行台車、搬送システム
12日前
個人
構造体
2か月前
個人
開封用カッター
21日前
個人
折りたたみコップ
1か月前
個人
チャック付き袋体
1か月前
個人
パウチ容器
1か月前
三甲株式会社
容器
3か月前
個人
チャック付き保存袋
19日前
個人
伸縮するゴミ収納器
1か月前
三甲株式会社
容器
3か月前
個人
プラスチックバッグ
2か月前
個人
開口しやすいレジ袋
2か月前
個人
穿孔紐通し結束器具
3か月前
三甲株式会社
容器
3か月前
個人
装飾品展示台兼梱包箱
22日前
有限会社 薩摩農機
梱包装置
3か月前
株式会社共走
保冷容器
1か月前
株式会社エフピコ
蓋体
2か月前
有限会社芳美商事
封筒
21日前
株式会社藤田
シュート
2か月前
株式会社トーモク
包装箱
2か月前
株式会社ナベル
ラベル貼付け機
2か月前
株式会社バンダイ
物品収容容器
2か月前
株式会社コジット
結束具
3か月前
花王株式会社
容器
2か月前
有限会社山中紙工所
紙袋
13日前
株式会社トーモク
包装箱
2か月前
株式会社イシダ
ラベルプリンタ
1か月前
株式会社トーモク
包装箱
2か月前
ダイワ包材株式会社
袋体
3か月前
NISSHA株式会社
収納容器
2か月前
株式会社トーモク
包装箱
1か月前
株式会社常光
収納トレイ
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ