TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024057899
公報種別
公開特許公報(A)
公開日
2024-04-25
出願番号
2022164879
出願日
2022-10-13
発明の名称
移動体システム
出願人
株式会社アイティーコスモス
代理人
個人
主分類
B64U
20/80 20230101AFI20240418BHJP(航空機;飛行;宇宙工学)
要約
【課題】災害時など地上に倒壊した建物などの障害物が存在する場合であっても追尾対象を追尾できる移動体システムを提供する。
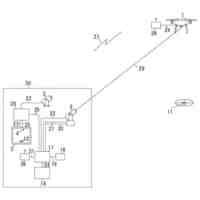
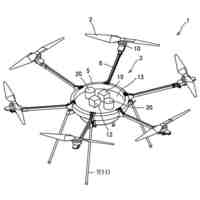
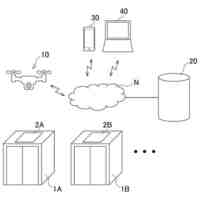
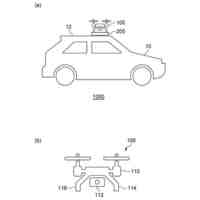
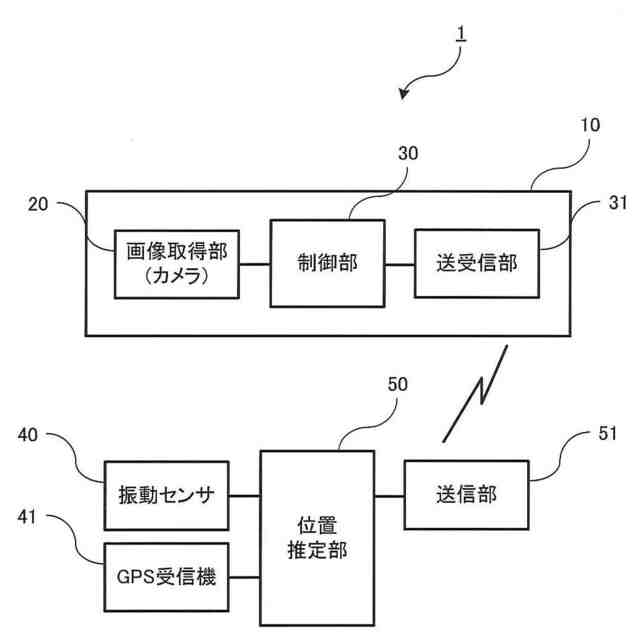
【解決手段】移動体であるドローン10と、ドローン10に搭載され、地上の画像を取得するカメラ20と、地上に配置された3個以上の振動センサ40のうち3個の振動センサ40で取得した振動とその3個の振動センサ40の位置に基づいて、追尾対象の位置を推定する位置推定部50と、カメラ20で取得した画像から追尾対象を抽出し、抽出した追尾対象及び位置推定部50で推定した追尾対象の位置に基づき、追尾対象を追尾するようにドローン10の飛行制御を行う制御部30と、を備えた移動体システム1。
【選択図】図1
特許請求の範囲
【請求項1】
移動体と、
前記移動体に搭載され、地上の画像を取得する画像取得部と、
地上に配置された複数の位置取得用センサと、
前記複数の位置取得用センサで取得した位置推定用データに基づいて、前記追尾対象の位置を推定する位置推定部と、
前記画像取得部で取得した画像から追尾対象を抽出し、該抽出した追尾対象及び前記位置推定部で推定した前記追尾対象の位置に基づき、前記追尾対象を追尾するように前記移動体を制御する制御部と、
を備えたことを特徴とする移動体システム。
続きを表示(約 200 文字)
【請求項2】
請求項1に記載の移動体システムにおいて、
前記位置推定用センサは、振動センサであり、
前記位置推定用データは、振動データであることを特徴とする移動体システム。
【請求項3】
請求項1に記載の移動体システムにおいて、
前記位置推定用センサは、音響センサであり、
前記位置推定用データは、音響データであることを特徴とする移動体システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、地上に障害物があっても追尾対象を確実に追尾できる移動体システムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、搭載したカメラで撮影した画像から追尾対象を特定するとともに、撮影した画像に含まれる追尾対象のピクセル数に基づいて、画像内における追尾対象の奥行きを算出し、算出した奥行きに基づいて追尾対象とドローンとの距離を適切に保ちつつ追尾対象の追尾を行うことができるドローンがあった(例えば、特許文献1参照)。
【0003】
このドローンによれば、追尾対象との距離を計測するためのステレオカメラ等を搭載する必要がないため、ドローンの製造コストをより低く抑えることができることとなる。
【先行技術文献】
【特許文献】
【0004】
特開2020-087074号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところが、上記従来のドローンでは、カメラで撮影した画像を画像処理することによりドローンの追尾制御を行うことはできるが、災害時など地上に倒壊した建物などの障害物が存在する場合には、人など地上を移動する追尾対象を追尾する際、障害物によって追尾対象の画像が撮影できない場合がある。つまりカメラで撮影した画像だけでは追尾対象を追尾できない場合が発生するという課題がある。
【0006】
本発明は、こうした課題に鑑みなされたもので、災害時など地上に倒壊した建物などの障害物が存在する場合であっても追尾対象を追尾できる移動体システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の適用例として実現することが可能である。なお、本欄における括弧内の参照符号や補足説明等は、本発明の理解を助けるために、後述する実施形態との対応関係を示したものであって、本発明を何ら限定するものではない。
【0008】
[適用例1]
適用例1に記載の発明は、
移動体(10)と、
前記移動体(10)に搭載され、地上の画像を取得する画像取得部(20)と、
地上に配置された複数の位置推定用センサ(40)と、
前記複数の位置推定用センサ(40)で取得した位置推定用データに基づいて、前記追尾対象の位置を推定する位置推定部(50)と、
前記画像取得部(20)で取得した画像から追尾対象を抽出し、該抽出した追尾対象及び前記位置推定部(50)で推定した前記追尾対象の位置に基づき、前記追尾対象を追尾するように前記移動体(10)を制御する制御部(30)と、
を備えたことを要旨とする移動体システム(1)である。
【0009】
このような移動体システム(1)では、移動体(10)に搭載された画像取得部(20)で取得された地上の画像から追尾対象が抽出され、地上に配置した複数の位置推定用センサ(40)から得られる位置推定用データから追尾対象の位置が推定される。
【0010】
そして、抽出された画像と推定された追尾対象の位置とに基づいて、追尾対象を追尾するように移動体(10)の制御が行われる。
一般的に、移動体(10)が追尾対象の追尾を行う場合、画像取得部(20)により取得した画像から追尾対象を抽出し、抽出した追尾対象を追尾するように移動体(10)の制御を行う。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行体
25日前
個人
ドローン係留装置
3か月前
個人
推進力発生具
12か月前
個人
ドローンの計測飛行方法
5か月前
個人
低空&水中客室ドローン
12か月前
個人
マルチコプター
10か月前
個人
マルチコプター型電気飛行機
19日前
個人
自由落下運航システム
1か月前
合同会社アドエア
飛行体落下補助装置
8か月前
合同会社アドエア
飛行体落下補助装置
13か月前
合同会社アドエア
飛行体落下補助装置
2か月前
河村電器産業株式会社
設備点検システム
5か月前
個人
気球及び温暖化防止システム
11か月前
株式会社FINEMECH
回転翼航空機
10か月前
株式会社FINEMECH
回転翼航空機
10か月前
株式会社中北製作所
羽ばたき装置
4日前
個人
飛行体
3か月前
個人
インフレータブル構造のクレーン。
12か月前
個人
転落・墜落時事故防止用エアバッグ
11か月前
国立大学法人九州大学
飛行体
1か月前
中国電力株式会社
物資運搬ドローン
8か月前
個人
チップジェットヘリコプターの回転翼
13か月前
京セラ株式会社
発着装置
6か月前
個人
チップジェット式ヘリコプターの回転翼
13か月前
SkyDeer株式会社
衛星制御方法
1か月前
株式会社E・C・R
無人飛翔体
11か月前
CAPXLE株式会社
緊急避難用気球
5か月前
CAPXLE株式会社
緊急避難用気球
5か月前
CAPXLE株式会社
緊急避難用気球
5か月前
株式会社FINEMECH
連結型回転翼航空機
5か月前
株式会社JVCケンウッド
撮像システム
5か月前
個人
ドローン
11か月前
東光鉄工株式会社
緊急発進ドローン装置
12か月前
株式会社デンソー
推進装置
3か月前
個人
ドローン
8か月前
トヨタ自動車株式会社
飛行体
7か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ