TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024040262
公報種別
公開特許公報(A)
公開日
2024-03-25
出願番号
2024016154,2023547715
出願日
2024-02-06,2023-03-08
発明の名称
電動弁の制御装置、電動弁及びそれを用いた電動弁ユニット
出願人
株式会社不二工機
代理人
弁理士法人第一国際特許事務所
主分類
F16K
31/04 20060101AFI20240315BHJP(機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段)
要約
【課題】ヒステリシス量に応じてステッピングモータの制御を変更することにより、適切な流量制御を行える電動弁の制御装置、電動弁及びそれを用いた電動弁ユニットを提供する。
【解決手段】弁座に対して接近する方向または離間する方向に移動可能な弁体と、駆動パルスを入力することにより動作するステッピングモータと、前記ステッピングモータから出力された駆動力によって前記弁体を駆動する駆動機構と、ヒステリシス量を記憶する不揮発性の記憶部と、外部から入力された動作指示情報に応じて前記ステッピングモータを駆動する制御部と、を備える。前記制御部は、外部から入力された動作指示情報に基づき、前記弁体を直前の移動方向とは異なる方向に移動させるときは、前記記憶部に記憶された前記ヒステリシス量に対応したパルス数を、前記弁体の目標移動量に対応した目標パルス数に加算した実効パルス数の駆動パルスを、前記ステッピングモータに入力する。
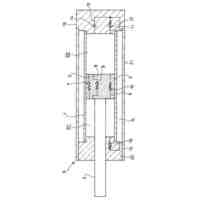
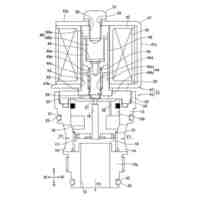
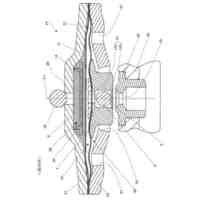
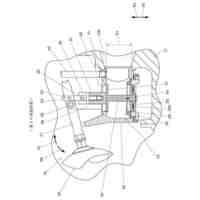
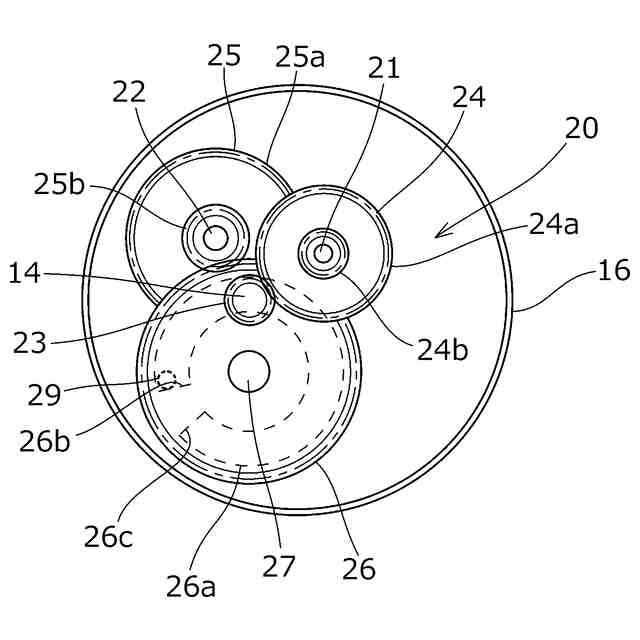
【選択図】図1
特許請求の範囲
【請求項1】
弁座に対して接近する方向または離間する方向に移動可能な弁体と、駆動パルスを入力することにより動作するステッピングモータと、前記ステッピングモータから出力された駆動力によって前記弁体を駆動する駆動機構と、不揮発性の記憶部と、外部から入力された動作指示情報に応じて前記ステッピングモータを駆動する制御部と、を備えた電動弁の制御装置であって、
前記記憶部はヒステリシス量を記憶し、
前記制御部は、外部から入力された動作指示情報に基づき、前記弁体を直前の移動方向とは異なる方向に移動させるときは、前記記憶部に記憶された前記ヒステリシス量に対応したパルス数を、前記弁体の目標移動量に対応した目標パルス数に加算した実効パルス数の駆動パルスを、前記ステッピングモータに入力し、
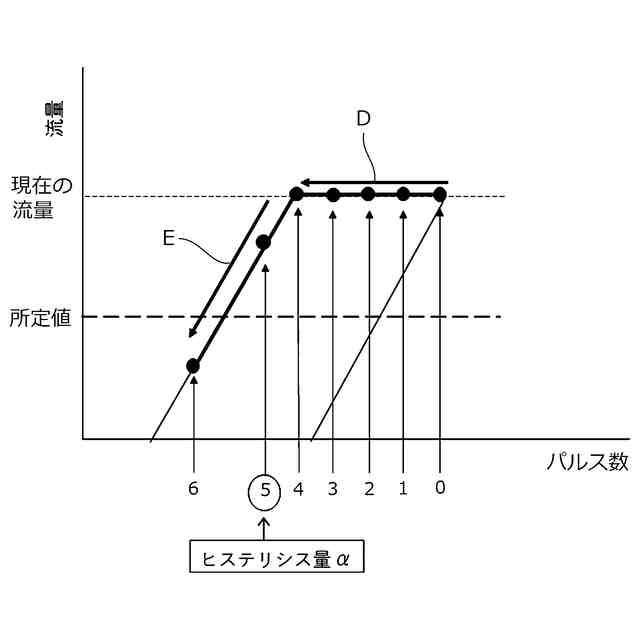
前記制御部は、前記弁体を一方向に移動させたのちに前記ステッピングモータを静止させ、そのときに前記弁体と前記弁座の間を通過する流体の流量を初期流量として求め、その後他方向に移動させるために前記ステッピングモータに入力する駆動パルスのパルス数を増大するごとに前記流体の流量を求め、前記初期流量に対して変化した流量が初めて所定量以上となった時点のパルス数-1を、前記ヒステリシス量として前記記憶部に記憶する、
ことを特徴とする電動弁の制御装置。
続きを表示(約 1,100 文字)
【請求項2】
前記制御部は、外部から入力された動作指示情報に基づき、前記弁体を直前の移動方向と同じ方向に移動させるときは、前記目標パルス数の駆動パルスを前記ステッピングモータに入力する、
ことを特徴とする請求項1に記載の電動弁の制御装置。
【請求項3】
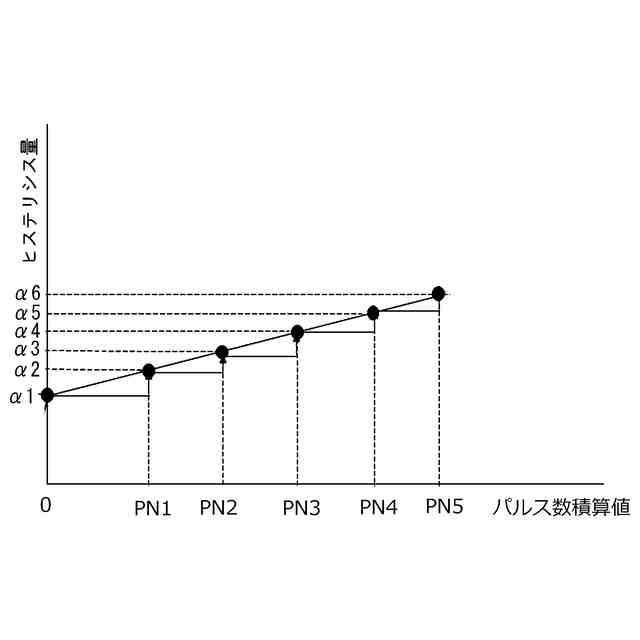
前記電動弁に入力される駆動パルスのパルス数の積算値に応じて、前記ヒステリシス量を変化させる、
ことを特徴とする請求項1に記載の電動弁の制御装置。
【請求項4】
現在値に前記実効パルス数を加算した値が規定値を超えるか、または現在値から前記実効パルス数を減算した値が規定値を下回ったときは、前記規定値の駆動パルスを前記ステッピングモータに入力する、
ことを特徴とする請求項1に記載の電動弁の制御装置。
【請求項5】
現在値から前記実効パルス数を減算した値が規定値を下回ったときは、前記規定値を超え前記規定値に閉弁押圧量に相当するパルス数を付加した値以下となる駆動パルスを前記ステッピングモータに入力する、
ことを特徴とする請求項1に記載の電動弁の制御装置。
【請求項6】
弁座に対して接近する方向または離間する方向に移動可能な弁体と、駆動パルスを入力することにより動作するステッピングモータと、前記ステッピングモータから出力された駆動力によって前記弁体を駆動する駆動機構と、不揮発性の記憶部と、外部から入力された動作指示情報に応じて前記ステッピングモータを駆動する制御部と、を備え、
前記記憶部はヒステリシス量を記憶し、
前記制御部は、外部から入力された動作指示情報に基づき、前記弁体を直前の移動方向とは異なる方向に移動させるときは、前記記憶部に記憶された前記ヒステリシス量に対応したパルス数を、前記弁体の目標移動量に対応した目標パルス数に加算した実効パルス数の駆動パルスを、前記ステッピングモータに入力し、
前記制御部は、前記弁体を一方向に移動させたのちに前記ステッピングモータを静止させ、そのときに前記弁体と前記弁座の間を通過する流体の流量を初期流量として求め、その後他方向に移動させるために前記ステッピングモータに入力する駆動パルスのパルス数を増大するごとに前記流体の流量を求め、前記初期流量に対して変化した流量が初めて所定量以上となった時点のパルス数-1を、前記ヒステリシス量として前記記憶部に記憶する、
ことを特徴とする電動弁。
【請求項7】
請求項1~5のいずれかに一項に記載の制御装置と、電動弁とを備えた、
ことを特徴とする電動弁ユニット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電動弁の制御装置、電動弁及びそれを用いた電動弁ユニットに関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
従来、空調機や冷蔵・冷凍ショーケース等に使用される冷凍サイクルシステムにおいては、冷房能力を安定させ、過熱度を一定にして効率良く運転するなどの目的から、ステッピングモータにより弁体を動作させる電動弁を用いて循環冷媒の流量調整を行っている。
【0003】
このような電動弁の制御にあたっては、通常、電源を投入したときなどにイニシャライズ処理(原点位置出し、基点位置出し、又は初期化などともいう)を実行し、弁体の位置出しを行ってから開度の制御を開始するようにしている(例えば、特許文献1参照)。ここで、イニシャライズ処理とは、全開位置から全閉位置又は全閉位置から全開位置に至るまでの全ストロークを超えるパルス数だけ、詳しくは、例えばステッピングモータのロータが確実にストッパと呼ばれる回り止めに衝突して回転を停止するパルス数だけ、ステッピングモータを閉弁方向又は開弁方向に十分に回転させる処理であり、これにより電動弁の0パルス又は最大パルスの初期位置を確定することができる。
【先行技術文献】
【特許文献】
【0004】
特許第4032993号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、一般的な電動弁は、ステッピングモータのロータの回転移動を軸線方向移動に変換して、弁体を軸線方向に駆動する。また、ロータの回転移動をギヤを用いて減速したのち、軸線方向移動に変換して弁体を駆動する電動弁もある。このような電動弁においては、開弁から閉弁に、又は閉弁から開弁に回転方向が逆転する場合に、動力伝達経路に存在するバックラッシに起因するヒステリシスにより、弁体を目標位置に精度良く到達させることができないという問題がある。弁体を目標位置に対して精度良く到達させるためには、ヒステリシス量を求めて駆動パルス数の補正を行う必要があるが、ヒステリシス量を高い精度で取得することが困難という実情がある。
【0006】
本発明は、ヒステリシス量に応じてステッピングモータの制御を変更することにより、適切な流量制御を行える電動弁の制御装置、電動弁及びそれを用いた電動弁ユニットを提供すること目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明による電動弁の制御装置は、
弁座に対して接近する方向または離間する方向に移動可能な弁体と、駆動パルスを入力することにより動作するステッピングモータと、前記ステッピングモータから出力された駆動力によって前記弁体を駆動する駆動機構と、不揮発性の記憶部と、外部から入力された動作指示情報に応じて前記ステッピングモータを駆動する制御部と、を備えた電動弁の制御装置であって、
前記記憶部はヒステリシス量を記憶し、
前記制御部は、外部から入力された動作指示情報に基づき、前記弁体を直前の移動方向とは異なる方向に移動させるときは、前記記憶部に記憶された前記ヒステリシス量に対応したパルス数を、前記弁体の目標移動量に対応した目標パルス数に加算した実効パルス数の駆動パルスを、前記ステッピングモータに入力し、
前記制御部は、前記弁体を一方向に移動させたのちに前記ステッピングモータを静止させ、そのときに前記弁体と前記弁座の間を通過する流体の流量を初期流量として求め、その後他方向に移動させるために前記ステッピングモータに入力する駆動パルスのパルス数を増大するごとに前記流体の流量を求め、前記初期流量に対して変化した流量が初めて所定量以上となった時点のパルス数-1を、前記ヒステリシス量として前記記憶部に記憶する、ことを特徴とする。
【0008】
本発明による電動弁は、
弁座に対して接近する方向または離間する方向に移動可能な弁体と、駆動パルスを入力することにより動作するステッピングモータと、前記ステッピングモータから出力された駆動力によって前記弁体を駆動する駆動機構と、不揮発性の記憶部と、外部から入力された動作指示情報に応じて前記ステッピングモータを駆動する制御部と、を備え、
前記記憶部はヒステリシス量を記憶し、
前記制御部は、外部から入力された動作指示情報に基づき、前記弁体を直前の移動方向とは異なる方向に移動させるときは、前記記憶部に記憶された前記ヒステリシス量に対応するパルス数を、前記弁体の目標移動量に対応した目標パルス数に加算した実効パルス数の駆動パルスを、前記ステッピングモータに入力し、
前記制御部は、前記弁体を一方向に移動させたのちに前記ステッピングモータを静止させ、そのときに前記弁体と前記弁座の間を通過する流体の流量を初期流量として求め、その後他方向に移動させるために前記ステッピングモータに入力する駆動パルスのパルス数を増大するごとに前記流体の流量を求め、前記初期流量に対して変化した流量が初めて所定量以上となった時点のパルス数-1を、前記ヒステリシス量として前記記憶部に記憶する、ことを特徴とする。
上記した本発明による電動弁は、いわゆるプロダクト・バイ・プロセス形式により、物の発明が特定されているという見方もできる。ここで、ヒステリシス量を記憶した電動弁を、製品から判別することが困難な場合がある。したがって、物をその構造又は特性により直接特定することが不可能であるか、又はおよそ実際的でないという事情(「不可能・非実際的事情」)が存在するものである。
【発明の効果】
【0009】
本発明によれば、ヒステリシス量に応じてステッピングモータの制御を変更することにより、適切な流量制御を行える電動弁の制御装置、電動弁及びそれを用いた電動弁ユニットを提供することができる。
【図面の簡単な説明】
【0010】
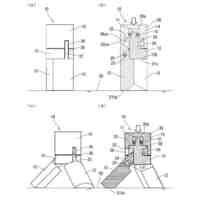
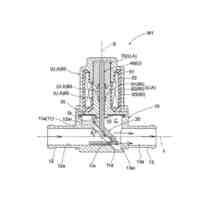
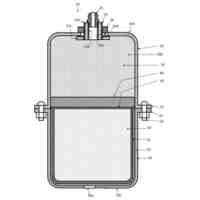
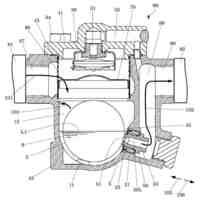
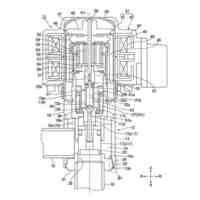
図1は、本実施の形態にかかる電動弁の閉弁状態を示す縦断面図に、制御装置及び検査装置の概略構成を加えた図である。
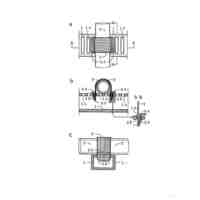
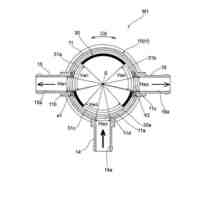
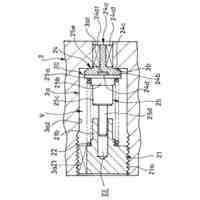
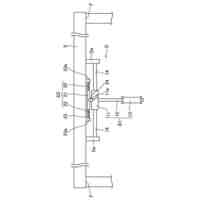
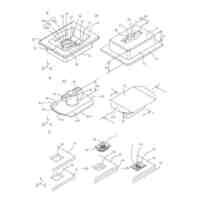
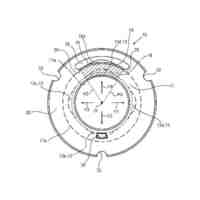
図2は、電動弁の減速部を平面視した図である。
図3は、電動弁のヒステリシス量を測定するフローを示すフローチャートである。
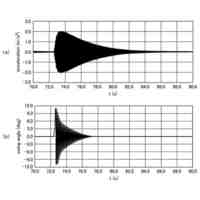
図4は、電動弁のステッピングモータに入力される駆動パルスと流量との関係を示すヒステリシス線図である。
図5は、電動弁のステッピングモータに入力される駆動パルスと流量との関係を示すヒステリシス線図である。
図6は、電動弁のステッピングモータに入力される駆動パルスと流量との関係を示すヒステリシス線図である。
図7は、駆動パルスの積算値とヒステリシス量とを対応付けて示すグラフである。
図8は、本実施形態の変形例にかかるヒステリシス線図である。
図9は、本実施形態の変形例にかかるヒステリシス線図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
脚装置
2か月前
個人
配管固定金具
3か月前
個人
ポール制振装置
3か月前
個人
家具
1か月前
個人
ジャイロの軸受装置
1か月前
個人
アンカーボルト
22日前
株式会社ミクニ
弁装置
2か月前
カヤバ株式会社
緩衝器
2か月前
株式会社ミクニ
弁装置
2か月前
マフレン株式会社
自動給脂器
2か月前
株式会社フジキン
バルブ装置
22日前
日東精工株式会社
シールねじ
3か月前
株式会社ミクニ
弁装置
2か月前
株式会社テイエルブイ
自動弁
27日前
株式会社ジェイテクト
玉軸受
3か月前
カヤバ株式会社
ダンパ
1か月前
カヤバ株式会社
バルブ
1か月前
個人
圧入成形物の製造法
1か月前
イワブチ株式会社
締結具
3か月前
株式会社不二工機
電磁弁
2か月前
株式会社不二工機
電動弁
1か月前
株式会社奥村組
制振機構
3か月前
株式会社奥村組
制振機構
3か月前
日星電気株式会社
多層チューブ
2か月前
株式会社ナジコ
自在継手
1か月前
株式会社テイエルブイ
熱応動弁
2か月前
ヒロホー株式会社
締結構造
今日
個人
穴なしナットと芯なしボルト
3か月前
株式会社テイエルブイ
複座弁装置
2か月前
個人
束ねばね
22日前
日本精工株式会社
ボールねじ装置
7日前
株式会社エステック
減速機
1か月前
井関農機株式会社
作業車両
1か月前
株式会社伊藤製作所
連結具
1か月前
明正工業株式会社
ねじ部材
3か月前
日本精工株式会社
転動装置
3か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ