TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024025191
公報種別
公開特許公報(A)
公開日
2024-02-26
出願番号
2022128433
出願日
2022-08-10
発明の名称
位置制御装置
出願人
オークマ株式会社
代理人
弁理士法人YKI国際特許事務所
主分類
G05D
3/12 20060101AFI20240216BHJP(制御;調整)
要約
【課題】本発明は、スティックスリップを防止する位置制御装置を提供する。
【解決手段】位置制御装置は、速度制御部2に積分時定数を通知する積分時定数演算部5を備える。積分時定数演算部5は、関数発生停止状態において、積分時定数の値の切り替えが連続するスティックスリップが発生した場合には、位置偏差絶対値|ΔP|が切替閾値INPを減少方向に跨いでも前記積分時定数の値を切り替えず、前記位置偏差絶対値|ΔP|が前記切替閾値INPより小さい追加閾値INP1を減少方向に跨いだ際および前記切替閾値INPを増加方向に跨いだ際に前記積分時定数の値を切り替える。
【選択図】図1
特許請求の範囲
【請求項1】
制御対象システムを駆動するモータに対して、指令を行ない、制御対象の位置を制御する位置制御装置において、
位置指令値と前記制御対象の位置帰還とに基づき、位置制御を行なう位置制御部と、
速度指令値と前記制御対象の速度帰還とに基づき、速度制御を行なう速度制御部と、
前記速度制御部に積分時定数を通知する積分時定数演算部であって、前記制御対象の移動の停止指示を受けた状態である関数発生停止状態で、前記位置指令値と前記位置帰還との差である位置偏差の絶対値が、予め規定された切替閾値を跨いだ場合に、前記積分時定数の値を切り替える積分時定数演算部と、
を備え、
前記積分時定数演算部は、前記関数発生停止状態において、前記積分時定数の値の切り替えが連続するスティックスリップが発生した場合には、前記位置偏差の絶対値が前記切替閾値を減少方向に跨いでも前記積分時定数の値を切り替えず、前記位置偏差の絶対値が前記切替閾値より小さい追加閾値を減少方向に跨いだ際および前記切替閾値を増加方向に跨いだ際に前記積分時定数の値を切り替える、
ことを特徴とする位置制御装置。
続きを表示(約 670 文字)
【請求項2】
請求項1に記載の位置制御装置であって、
前記積分時定数演算部は、前記関数発生停止状態となった後、前記位置偏差の絶対値が、前記切替閾値以下になった後、再度、前記切替閾値超過となった場合に、前記スティックスリップが発生したと判断する、ことを特徴とする位置制御装置。
【請求項3】
請求項1に記載の位置制御装置であって、
前記積分時定数演算部は、前記追加閾値を、前記位置偏差の絶対値が前記切替閾値以下の状態で前記制御対象が静止したときの位置帰還と、前記位置偏差の絶対値が前記切替閾値超過の状態で前記制御対象が静止したときの位置帰還と、前記切替閾値と、に基づいて算出する、ことを特徴とする位置制御装置。
【請求項4】
請求項2に記載の位置制御装置であって、
前記積分時定数演算部は、前記追加閾値をINP1、前記位置偏差の絶対値が前記切替閾値以下の状態で前記制御対象が静止したときの位置帰還をP1、前記位置偏差の絶対値が前記切替閾値超過の状態で前記制御対象が静止したときの位置帰還をP2、前記切替閾値をINPとした場合、INP1=INP-|P1-P2|とする、ことを特徴とする位置制御装置。
【請求項5】
請求項1から4のいずれか1項に記載の位置制御装置であって、
前記積分時定数演算部は、前記位置偏差の絶対値が、前記追加閾値以下となった後、再度、前記切替閾値を超過した場合には、前記追加閾値の値をさらに小さい値に切り替える、ことを特徴とする位置制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、サーボモータを用いて工作機械等の送り軸を制御する位置制御装置に関するものである。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
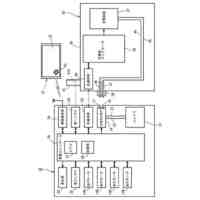
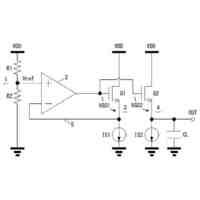
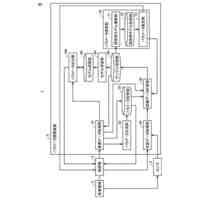
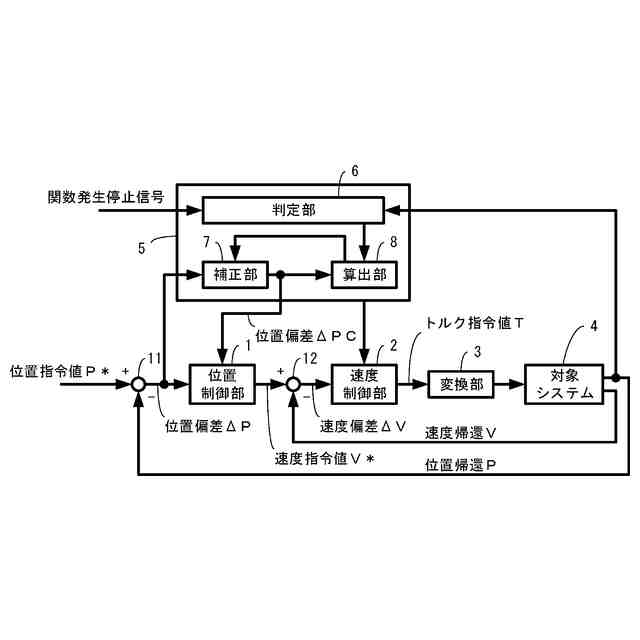
一般的に用いられる位置制御装置の構成と各種信号の流れに関して、図5にて説明する。
【0003】
図示しない上位制御装置より、位置指令値P*が入力される。減算器56は、位置指令値P*から位置帰還Pを減算し、位置偏差ΔP(=P*-P)を算出する。位置帰還Pは、対象システム54の制御対象位置を検出した位置検出信号を示す。位置偏差ΔPは、位置制御部51にて、位置ループゲイン等により比例増幅されて速度指令値V*となる。減算器57は、速度指令値V*から速度帰還Vを減算し、速度偏差ΔV(=V*-V)を算出する。速度帰還Vは、サーボモータに結合された位置検出器(図示しない)の回転角位置の時間微分値、あるいはサーボモータに結合された速度検出器(図示しない)の出力である。
【0004】
積分時定数演算部55は、関数発生停止信号と位置偏差ΔPにより、積分時定数を算出し、速度制御部52へ通知する。
【0005】
速度制御部52は、速度偏差ΔVに対して、積分時定数演算部55から通知された積分時定数によりPI制御等を行ない、トルク指令値Tを算出する。トルク指令値Tは、変換部53にて対象システム54に対する発生トルクとなる。
【0006】
サーボモータを用いた工作機械等の送り軸の位置決め制御では、位置決め時にオーバーシュートが生じることを防止する方法として、位置偏差が「0」近傍になると、速度ループの積分器の値を減らしサーボモータの出力トルクを下げる方法が知られている。この出力トルクを下げる方法として、速度ループの積分器を完全積分と不完全積分にて切り替える、すなわち、積分時定数の切り替えを行なうことが広く用いられている。
【0007】
積分時定数は、通常、第一の積分時定数を使用する。一方、上位制御装置からの移動指令が「0」で、位置偏差が所定の値以下となった場合に限り、第二の積分時定数へ切り替えを行なう。なお、以下では、上位制御装置からの移動指令が「0」となることを「関数発生停止」と記載する。
【0008】
また、特許文献1では、サーボモータがその回転を停止する直前より、速度ループ処理の積分処理を不完全積分にし、通常のサーボモータの駆動中は上記速度ループ処理の積分処理を完全積分することが提案されている。かかる特許文献1の技術によれば、サーボ剛性が保持されるとともに、停止時にオーバーシュートを生じさせることは少なくなる。
【先行技術文献】
【特許文献】
【0009】
特許第3197898号公報
【発明の概要】
【発明が解決しようとする課題】
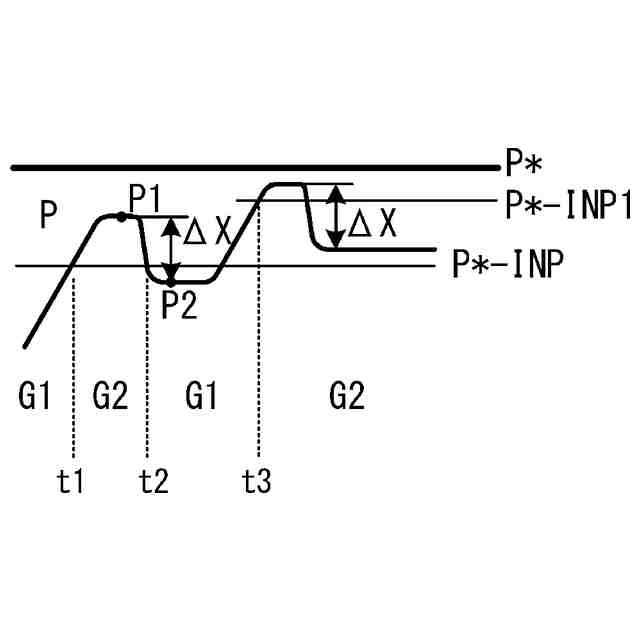
【0010】
積分処理にて、完全積分と不完全積分とを切り替える制御を採用する場合、上位制御装置からの関数発生停止後、位置偏差が所定の値以下となると、積分時定数の値を切り替える。積分時定数の切り替えの一例を図7に示す。図7にて、位置偏差ΔPの絶対値|ΔP|が、規定の切替閾値INP以下となると、積分時定数の値が第二の時定数G2となり、位置偏差絶対値|ΔP|が切替閾値INPより大きくなると、積分時定数の値が第一の時定数G1となる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社豊田自動織機
無人走行体
2か月前
株式会社ディスコ
加工装置
2か月前
株式会社クボタ
作業車
1か月前
川崎重工業株式会社
制御装置
2か月前
アズビル株式会社
流量制御装置
20日前
アズビル株式会社
電圧出力回路
1か月前
ミネベアミツミ株式会社
入力装置
11日前
トヨタ自動車株式会社
自動走行搬送車
19日前
エイブリック株式会社
ボルテージレギュレータ
19日前
株式会社クボタ
故障診断装置
18日前
株式会社クボタ
操作機構及び作業車
1か月前
株式会社デンソー
制御装置
24日前
リックス株式会社
状態検出装置
14日前
日本プラスト株式会社
節度感付加装置
1か月前
株式会社デンソー
制御装置
24日前
株式会社オリジン
電源装置
1か月前
村田機械株式会社
搬送車システム
4日前
CKD日機電装株式会社
むだ時間を用いた高調波除去
2か月前
株式会社オリジン
電源装置
1か月前
株式会社デンソー
減圧弁制御装置
1か月前
株式会社GSユアサ
電力変換装置
27日前
株式会社豊田自動織機
車両用の電動圧縮機
2か月前
株式会社デンソー
電子制御装置
1か月前
THK株式会社
編集装置及び編集方法
1か月前
THK株式会社
編集装置及び編集方法
1か月前
川崎重工業株式会社
要因分析装置及び要因分析方法
24日前
NTN株式会社
情報処理装置
2か月前
株式会社ディスコ
加工装置
1か月前
国立大学法人 名古屋工業大学
パラメータ探索空間算出方法
1か月前
東洋電装株式会社
移動検出装置および鞍乗車両
26日前
村田機械株式会社
搬送車システム
2か月前
株式会社FUJI
暖機運転システムを備えた工作機械
1か月前
村田機械株式会社
走行車システム
1か月前
愛三工業株式会社
弁システム
1か月前
株式会社デンソー
ペダル装置
24日前
株式会社デンソー
ペダル装置
1か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ