TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024021118
公報種別
公開特許公報(A)
公開日
2024-02-16
出願番号
2022123716
出願日
2022-08-03
発明の名称
垂直離着陸飛行体
出願人
株式会社アイティーコスモス
代理人
個人
主分類
B64C
29/02 20060101AFI20240208BHJP(航空機;飛行;宇宙工学)
要約
【課題】垂直離陸から水平飛行への移行時及び水平飛行から垂直着陸への移行時に推進力の向きを変化させる必要がなく移行可能であり、主翼取付角度を変更することができる垂直離着陸飛行体を提供する。
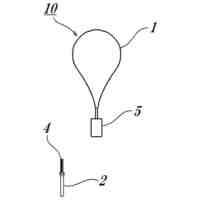
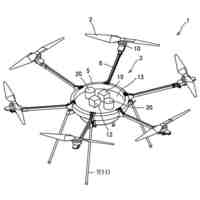
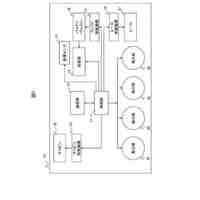
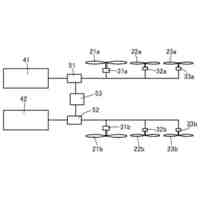
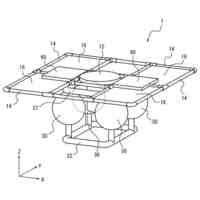
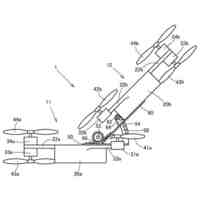
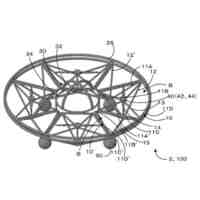
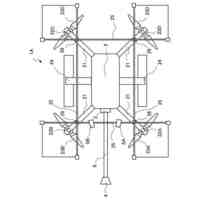
【解決手段】胴体10と、胴体10軸に対して左右に取り付けられた水平飛行用の主翼20と、推進力を個別に制御することができる3以上の推進部40と、3以上の推進部40のうち、任意の2つの推進部40を含む胴体10軸と平行な平面内に、残りの1以上の推進部40が含まれないような位置関係で、胴体10を地面に対してほぼ垂直にした際に、胴体10の軸方向上方に推進力を与える向きになるように推進部40を胴体10に取り付けるアーム50と、を備えることを特徴とする垂直離着陸飛行体1。
【選択図】図1
特許請求の範囲
【請求項1】
胴体と、
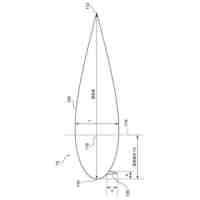
前記胴体軸に対して左右に取り付けられた主翼と、
推進力を個別に制御することができる3以上の推進部と、
3以上の前記推進部のうち、任意の2つの推進部を含む前記胴体軸と平行な平面内に、残りの1以上の推進部が含まれないような位置関係で、前記胴体を地面に対してほぼ垂直にした際に、前記胴体の軸方向上方に推進力を与える向きになるように前記推進部を前記胴体に取り付けるアームと、
を備えることを特徴とする垂直離着陸飛行体。
続きを表示(約 100 文字)
【請求項2】
請求項1に記載の垂直離着陸飛行体において、
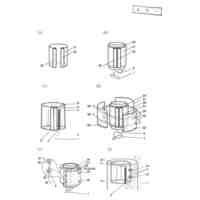
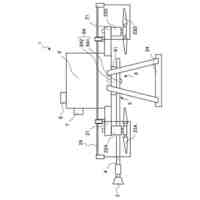
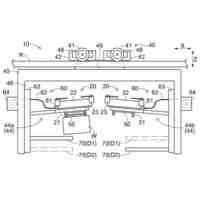
前記胴体の軸に対する主翼の取付角度を変化させることができる主翼取付角駆動部を備えることを特徴とする垂直離着陸飛行体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、垂直離着陸ができ、かつ、高速に水平飛行ができる垂直離着陸飛行体に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、複数の水平飛行用主翼と、垂直尾翼を有し、上昇前進兼用プロペラを、複数の水平飛行用主翼に固定し、この水平飛行用主翼を、上昇下降時はほぼ垂直に向くよう回転させて上昇下降し、水平飛行時は、迎え角で固定し水平飛行することを特徴とする飛行体があった(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2022-16568号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところが、このような飛行体では、垂直離陸から水平飛行への移行時及び水平飛行から垂直着陸への移行時に、推進力を発生するプロペラが固定された主翼の向きを変化させなければならない。
【0005】
このため、主翼を動かすための複雑な機構が必要となり、メンテナンスに手間がかかり、故障の可能性も増加し、コストも増加するという課題があった。
さらに、このような飛行体では、推進力を発生するプロペラが主翼に固定されているので、主翼を後退させたり、展開させたりさせることができず、離着陸時には主翼が干渉しないような広い空間が必要となる課題があった。
【0006】
本発明は、こうした課題に鑑みなされたもので、垂直離陸から水平飛行への移行時及び水平飛行から垂直着陸への移行時に推進力の向きを変化させる必要がなく、主翼取付角度を変更することができる垂直離着陸飛行体を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の適用例として実現することが可能である。なお、本欄における括弧内の参照符号や補足説明等は、本発明の理解を助けるために、後述する実施形態との対応関係を示したものであって、本発明を何ら限定するものではない。
【0008】
[適用例1]
適用例1に記載の発明は、
胴体(10)と、
前記胴体(10)軸に対して左右に取り付けられた主翼(20)と、
推進力を個別に制御することができる3以上の推進部(40)と、
3以上の前記推進部(40)のうち、任意の2つの推進部(40)を含む前記胴体(10)軸と平行な平面内に、残りの1以上の推進部(40)が含まれないような位置関係で、前記胴体(10)を地面に対してほぼ垂直にした際に、前記胴体(10)の軸方向上方に推進力を与える向きになるように前記推進部(40)を前記胴体(10)に取り付けるアーム(50)と、
を備えることを要旨とする垂直離着陸飛行体(1)である。
【0009】
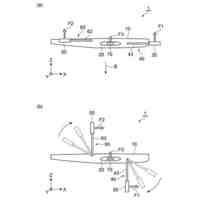
このような垂直離着陸飛行体(1)では、胴体(10)を地面に対してほぼ垂直にした状態から垂直に離陸することができる。垂直離陸時には、主翼(20)は垂直揚力には寄与せず、推進力が垂直上方となるように、アーム(50)を介して胴体(10)に取り付けられた複数の推進部(40)により上方に離陸する。
【0010】
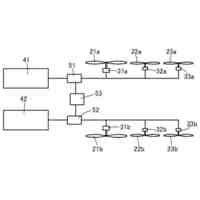
さらに、複数の推進部(40)の推進力を個別に制御することにより、推進部(40)の推進力だけにより垂直離着陸飛行体(1)の姿勢を概ね垂直方向から、概ね水平方向に変化させ、水平飛行を行うことができる。
水平飛行においては、主翼(20)が揚力を発生させ、複数の推進部(40)が垂直離着陸飛行体(1)を前方に推進させるように推進力を発生する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行体
1か月前
個人
ドローン係留装置
3か月前
個人
ドローンの計測飛行方法
6か月前
個人
自由落下運航システム
1か月前
個人
マルチコプター
11か月前
個人
マルチコプター型電気飛行機
1か月前
個人
人工衛星推進材循環エンジン
8日前
合同会社アドエア
飛行体落下補助装置
8か月前
合同会社アドエア
飛行体落下補助装置
3か月前
個人
飛行体
3か月前
株式会社中北製作所
羽ばたき装置
15日前
個人
気球及び温暖化防止システム
12か月前
河村電器産業株式会社
設備点検システム
5か月前
株式会社FINEMECH
回転翼航空機
10か月前
個人
転落・墜落時事故防止用エアバッグ
11か月前
株式会社FINEMECH
回転翼航空機
10か月前
国立大学法人九州大学
飛行体
2か月前
中国電力株式会社
物資運搬ドローン
8か月前
CAPXLE株式会社
緊急避難用気球
5か月前
CAPXLE株式会社
緊急避難用気球
5か月前
京セラ株式会社
発着装置
7か月前
SkyDeer株式会社
衛星制御方法
2か月前
CAPXLE株式会社
緊急避難用気球
5か月前
個人
ドローン
9か月前
株式会社デンソー
推進装置
4か月前
株式会社JVCケンウッド
撮像システム
6か月前
株式会社FINEMECH
連結型回転翼航空機
6か月前
個人
ドローン
11か月前
株式会社エムアイエー
機体フレーム
3か月前
トヨタ自動車株式会社
飛行体
7か月前
旭ビルウォール株式会社
移動システム
4か月前
日鉄テクノロジー株式会社
ドローン測定装置
5か月前
日鉄テクノロジー株式会社
ドローン測定装置
5か月前
株式会社ダイフク
搬送システム
1か月前
株式会社アイティーコスモス
移動体システム
20日前
株式会社デンソー
飛行制御装置
12か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ