TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2023176402
公報種別
公開特許公報(A)
公開日
2023-12-13
出願番号
2022088663
出願日
2022-05-31
発明の名称
AMPパラレルロボット
出願人
学校法人近畿大学
代理人
個人
主分類
B25J
11/00 20060101AFI20231206BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
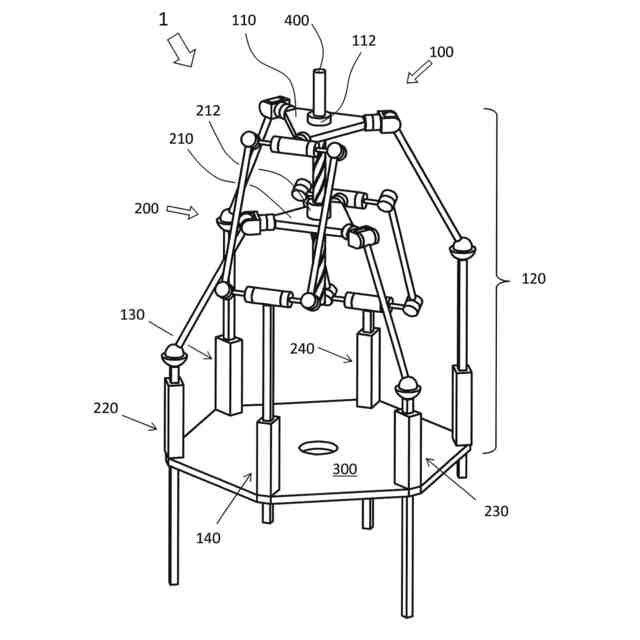
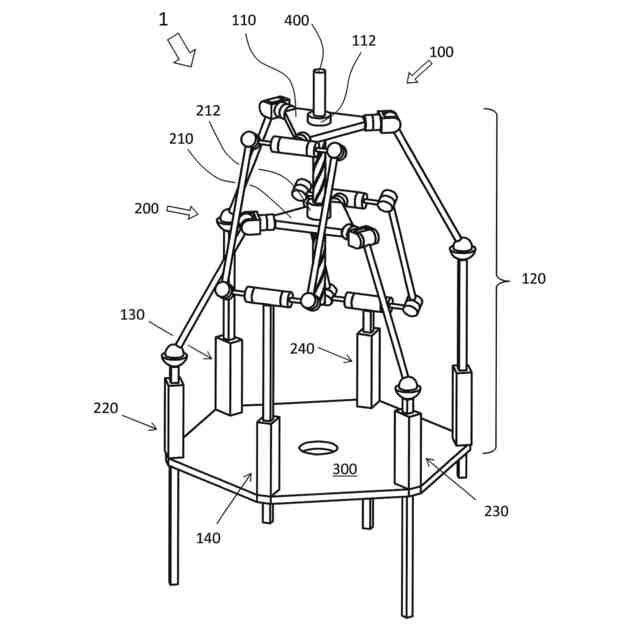
【課題】DELAT機構ロボットを2台用いて、出力節が6自由度を有するロボットを提供する。
【解決手段】ベースに対して自由度5に拘束された第1の可動プラットフォームを有する第1のパラレルロボットと、
前記ベースに対して自由度5拘束された第2の可動プラットフォームを有する第2のパラレルロボットを有し、
前記第1の可動プラットフォームと、前記第2の可動プラットフォームが並進・回転変換機構で連結されたAMPパラレルロボット。
【選択図】図1
特許請求の範囲
【請求項1】
ベースに対して自由度5に拘束された第1の可動プラットフォームを有する第1のパラレルロボットと、
前記ベースに対して自由度5に拘束された第2の可動プラットフォームを有する第2のパラレルロボットを有し、
前記第1の可動プラットフォームと、前記第2の可動プラットフォームが並進・回転変換機構で連結されたAMPパラレルロボット。
続きを表示(約 230 文字)
【請求項2】
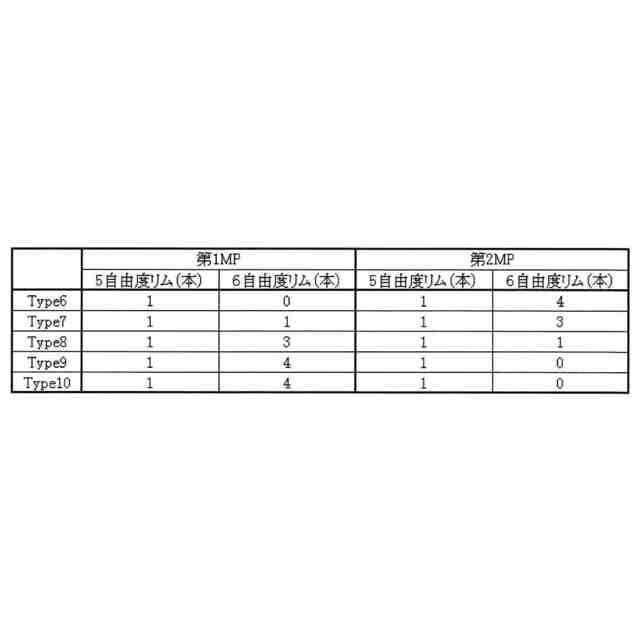
前記第1のパラレルロボットと前記第2のパラレルロボットは、それぞれ自由度5のリムを1本有し、
前記第1のパラレルロボットと前記第2のパラレルロボットで合わせて4本の自由度6のリムを有する請求項1に記載されたAMPパラレルロボット。
【請求項3】
前記第1のパラレルロボットと前記第2のパラレルロボットは、それぞれ自由度5のリムが1本と、自由度6のリムが2本で構成された請求項2に記載されたAMPパラレルロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は6自由度の可動節を有する改良型W-DELTA型ロボットに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
一般的なパラレルロボットとして、よく知られているものにDELTA型ロボットがある(特許文献1)。このタイプのロボットは、1つの可動プラットフォーム(Moving Platform、以下、「MP」とする。)を出力節とし、複数のリムを用いてMPの位置と姿勢を制御する。DELTA型ロボットは、重量の大きいモータをベース側に配置することで可動部であるMPが軽量となり、出力節が高速・高精度で動かせるという特長を有する。一方で、DELTA型ロボットは、リム間の機械的干渉により出力節の回転動作範囲が制限される問題がある。
【0003】
そこで、近年、2個のパラレル機構を用いて、その2個のMPをラック・ピニオン、プーリ、ギア、ネジなどの並進運動を回転運動に変換する機構で連結し、出力節の回転動作範囲を拡大するArticulated Moving Platform(AMPと略す)パラレルロボットの研究が盛んである。
【0004】
最近では6自由度運動を対象とするAMPパラレルロボットが提案されている。6自由度運動を実現するAMPパラレルロボットの研究の多くは、3自由度DELTA機構を2個用いて、2個のMP間に並進-回転変換機構を内在させる設計思想が採用されている。
【先行技術文献】
【特許文献】
【0005】
米国特許第4976582号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら3自由度DELTA機構のMPはベースと平行となる制約があるために、平行なMPに対して出力節を傾かせるための別の機構が必要となり、機構設計が複雑となりロボット機構が大型化してしまうという問題点を有していた。
【課題を解決するための手段】
【0007】
本発明は上記の課題に鑑みて想到されたものであり、MP自体の自由度を高め、MPに出力節を傾かせるための別の機構を施すことなく6自由度AMPパラレルロボットを提供する。
【0008】
具体的に本発明に係るAMPパラレルロボットは、
ベースに対して自由度5に拘束された第1の可動プラットフォームを有する第1のパラレルロボットと、
前記ベースに対して自由度5拘束された第2の可動プラットフォームを有する第2のパラレルロボットを有し、
前記第1の可動プラットフォームと、前記第2の可動プラットフォームが並進・回転変換機構で連結されたことを特徴とする。
【発明の効果】
【0009】
本発明に係るAMPパラレルロボットは、ベースに対して自由度5で拘束された可動プラットフォームを2台有するので、それぞれのMPに出力節を傾かせる別の機構(ユニバーサルジョイントなどの自由度2の対偶等)を施すことなく、MP間で保持された出力節(並進・回転変換機構)を6自由度で可動させることができる。このため、MPを軽量で構成することができ、高速の動作が可能となる。その結果、MP間に配置された出力節も高速に動作させることができる。
【図面の簡単な説明】
【0010】
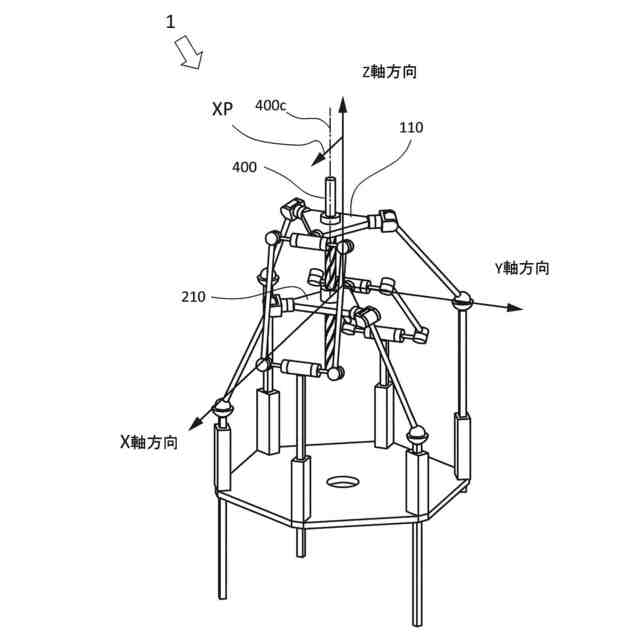
本発明に係るAMPパラレルロボットの構成を示す図である。
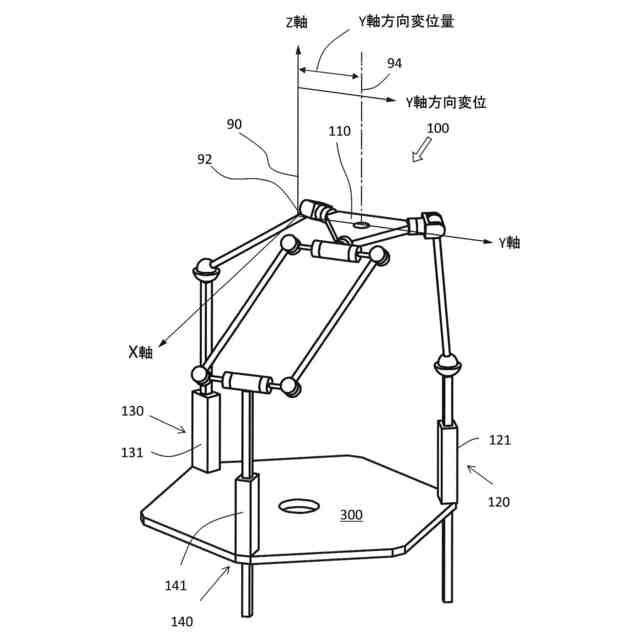
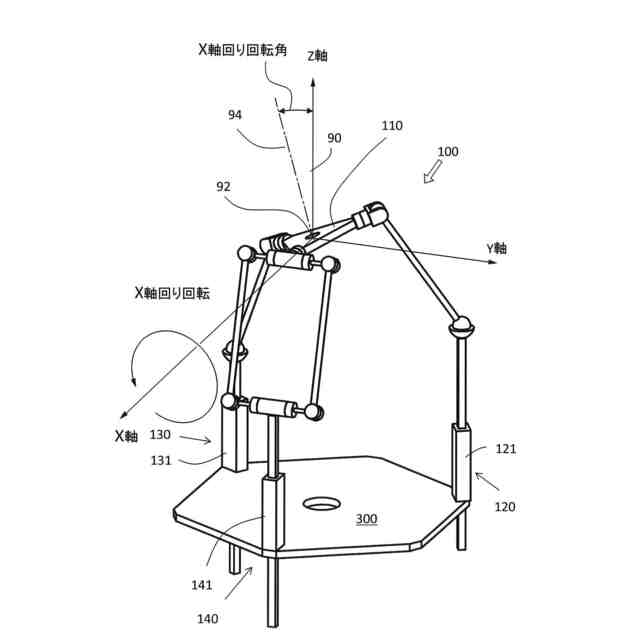
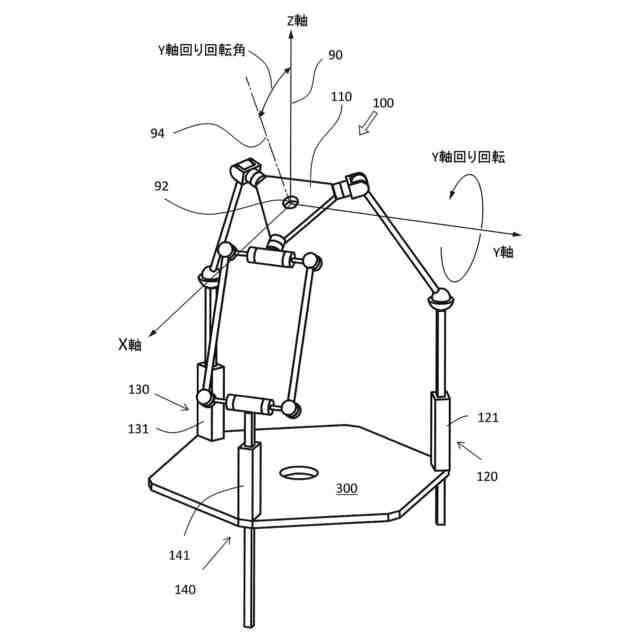
AMPパラレルロボットのサブメカニズムである第1のパラレルロボットの構成を示す図である。
第1のパラレルロボットの可動プラットフォームがX軸方向に並進運動している場合を示す図である。
第1のパラレルロボットの可動プラットフォームがY軸方向に並進運動している場合を示す図である。
第1のパラレルロボットの可動プラットフォームがZ軸方向に並進運動している場合を示す図である。
第1のパラレルロボットの可動プラットフォームがX軸回りに回転運動している場合を示す図である。
第1のパラレルロボットの可動プラットフォームがY軸回りに回転運動している場合を示す図である。
AMPパラレルロボットの出力節がX軸方向に並進運動している場合を示す図である。
AMPパラレルロボットの出力節がY軸方向に並進運動している場合を示す図である。
AMPパラレルロボットの出力節がZ軸方向に並進運動している場合を示す図である。
AMPパラレルロボットの出力節がX軸回りに回転運動している場合を示す図である。
AMPパラレルロボットの出力節がY軸回りに回転運動している場合を示す図である。
AMPパラレルロボットの出力節がZ軸回りに回転運動している場合を示す図である。
Type1のAMPパラレルロボットのリンク図である。
Type2のAMPパラレルロボットのリンク図である。
Type3のAMPパラレルロボットのリンク図である。
Type4のAMPパラレルロボットのリンク図である。
Type5のAMPパラレルロボットのリンク図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
5か月前
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
18日前
株式会社ツノダ
挟持工具
2か月前
株式会社ツノダ
挟持工具
1か月前
個人
ペットボトル用蓋開け具。
6か月前
UTM株式会社
搬送装置
5か月前
川崎重工業株式会社
ハンド
2か月前
株式会社右川ゴム製造所
把持装置
27日前
個人
ロボットシステム
4か月前
トヨタ自動車株式会社
関節機構
4か月前
株式会社不二越
ロボット
6か月前
学校法人立命館
ロボットハンド
1か月前
株式会社不二越
ロボット
4か月前
学校法人立命館
グリッパ
1か月前
トヨタ自動車株式会社
関節機構
5か月前
個人
作業台
5か月前
オムロン株式会社
ロボットハンド
6か月前
個人
プーリーキー抜き治具
1か月前
株式会社不二越
予測システム
2か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社ダイヘン
情報処理装置
27日前
株式会社ダイヘン
画像生成装置
27日前
工機ホールディングス株式会社
作業機
4か月前
株式会社ダイヘン
画像生成装置
27日前
国立大学法人東北大学
剛性可変連結体
5か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
2か月前
小倉クラッチ株式会社
ロボットハンド
4か月前
株式会社中村製作所
トルクドライバー
1か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社共和製作所
ロボット用アーム
5日前
工機ホールディングス株式会社
作業機
3か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ


































