TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2023175293
公報種別
公開特許公報(A)
公開日
2023-12-12
出願番号
2022087667
出願日
2022-05-30
発明の名称
ロボット
出願人
株式会社デンソーウェーブ
代理人
個人
,
個人
主分類
B25J
19/00 20060101AFI20231205BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】先端アームの組み付けの際に、配線や配管の噛み込みや折れが発生するのを抑制することができるロボットを提供する。
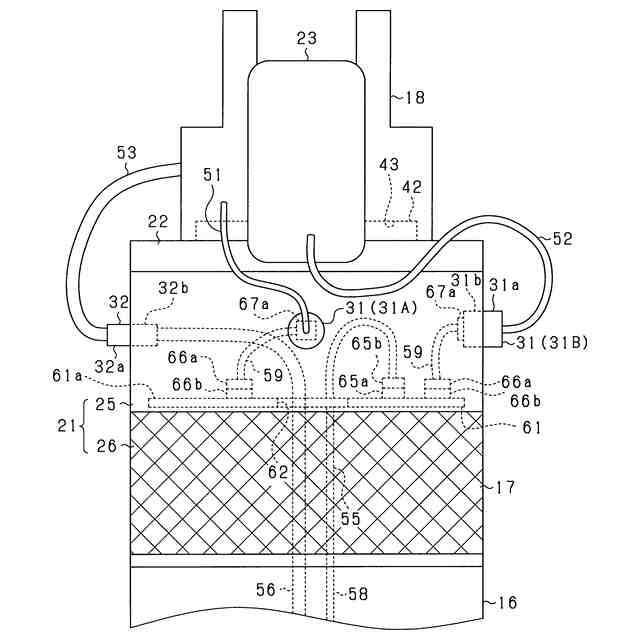
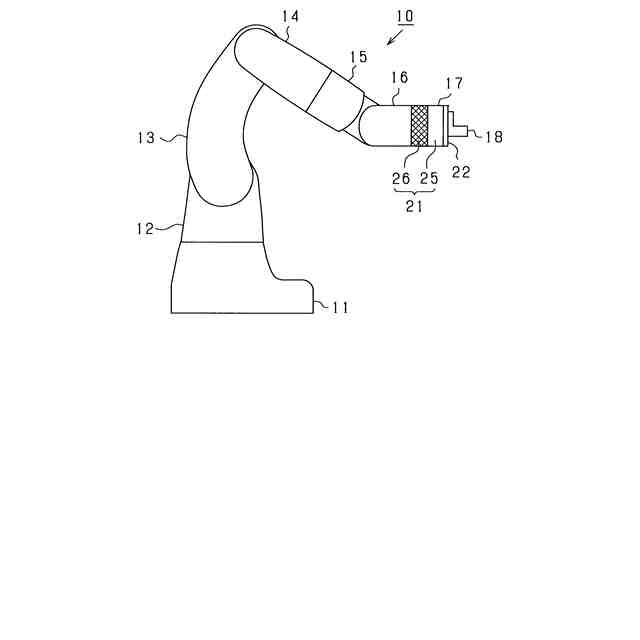
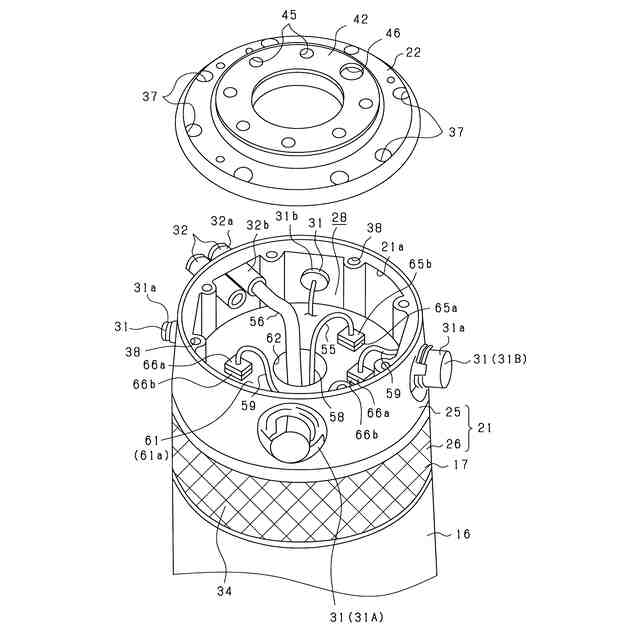
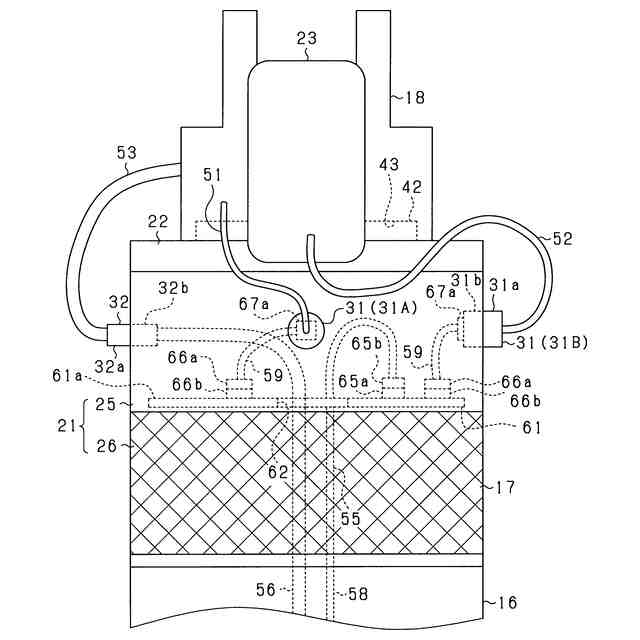
【解決手段】ロボットが備える複数のアームには、ハンド18が取り付けられる有底筒状の第6アーム17と、第6アーム17に隣接する第5アーム16とが含まれている。第6アーム17は、第5アーム16に連結された筒状体21と、筒状体21の先端開口を塞いだ状態で設けられ、ハンド18が取り付けられる蓋部22とを有する。筒状体21には、配線コネクタ31と配管コネクタ32とが設けられている。各コネクタ31,32には、ハンド18から延びる配線51及び配管53をそれぞれ接続可能となっているとともに、第5アーム16の内部から第6アーム17の内部へ延びる内部配線部55及び内部配管部56がそれぞれ接続されている。また、筒状体21と蓋部22とは互いに別体として形成され、ボルトを用いて互いに固定されている。
【選択図】図4
特許請求の範囲
【請求項1】
互いに連結された複数のアームを備え、
前記複数のアームには、エンドエフェクタが取り付けられる有底筒状の先端アームと、前記先端アームに隣接する隣接アームとが含まれており、
前記先端アームには、配線部又は配管部のいずれかである線状部が接続される接続部が設けられ、
前記接続部には、前記エンドエフェクタ側から延びる前記線状部が接続可能とされているとともに、前記隣接アームの内部から前記先端アームの内部へ延びる前記線状部が内部線状部として接続されるロボットであって、
前記先端アームは、
前記隣接アームに連結され、前記接続部が設けられた筒状体と、
前記筒状体の先端開口を塞ぎ、前記エンドエフェクタが取り付けられる蓋部とを有し、
前記筒状体と前記蓋部とは、互いに別体として形成され、固定具を用いて互いに固定されている、ロボット。
続きを表示(約 690 文字)
【請求項2】
前記筒状体は、その軸線方向に分割されているとともに、互いに結合された第1筒状部及び第2筒状部を有しており、
前記第1筒状部及び前記第2筒状部のうち、前記第1筒状部にのみ前記接続部が設けられている、請求項1に記載のロボット。
【請求項3】
前記第2筒状部の外周面には、滑り止め構造が設けられている、請求項2に記載のロボット。
【請求項4】
前記筒状体には、前記接続部として、配線接続用の配線接続部が複数設けられており、
それら複数の配線接続部には、前記内部線状部としての内部配線部が接続されており、
前記筒状体の内側空間には、その内側空間を前記筒状体の軸線方向に仕切るように基板が設けられており、
前記内部配線部は、
前記隣接アームの内部から前記内側空間に入り込み、前記基板に接続された第1配線と、
前記配線接続部ごとに設けられ、前記基板と前記配線接続部とにそれぞれ接続された複数の第2配線と、を有しており、
前記複数の配線接続部は、前記軸線方向において前記基板よりも前記蓋部側に配置されている、請求項1に記載のロボット。
【請求項5】
前記基板には、前記第1配線を挿通させる挿通部が形成され、
前記第1配線は、前記挿通部を通じて前記基板よりも前記蓋部側に導かれ、前記基板に前記蓋部側から接続されている、請求項4に記載のロボット。
【請求項6】
前記蓋部は、前記筒状体に着脱可能に固定されている、請求項1に記載のロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
互いに連結された複数のアームを備える多関節型のロボットでは、複数のアームのうち先端に位置する先端アームに把持部(ハンド)等のエンドエフェクタが取り付けられる(例えば特許文献1参照)。先端アームは有底の筒状(容器状)をなしており、その先端側となる底部にエンドエフェクタが取り付けられるようになっている。また、先端アームは、例えば金属材料により一体形成されている。
【先行技術文献】
【特許文献】
【0003】
特開2005-131761号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ロボットには、エンドエフェクタから延びる配線や配管(以下、エンドエフェクタ用の配線・配管という)が接続されるコネクタが設けられている。エンドエフェクタ用の配線・配管はロボット外部を通って配設されるため、例えば人と協働する協働ロボットでは、配線・配管が長いと人と干渉するおそれがある。そのため、エンドエフェクタ用の配線・配管はできるだけ短くするのが望ましい。
【0005】
そこで、上記のコネクタを、エンドエフェクタが取り付けられる先端アームに設けることにより、エンドエフェクタ用の配線・配管を短くすることが考えられる。この場合、ロボットには、各アーム内を通じて先端アームの内部まで延びる内部配線や内部配管を配設しておき、その内部配線・内部配管をコネクタに先端アーム内から接続しておくことになる。この場合、コネクタを介して内部配線とエンドエフェクタ用の配線とが接続され、内部配管とエンドエフェクタ用の配管とが接続されることになる。
【0006】
ここで、上記の構成において、先端アームを、先端アームの隣のアームに組み付ける際には、まず先端アームのコネクタに内部配線・内部配管を接続し、その後、先端アームを隣のアームに組み付けることになる。しかしながら、かかる組付方法では、先端アームを隣のアームに組み付ける際、内部配線・内部配管の状態を目視で確認するのが困難である。そのため、内部配線・内部配管が先端アームと隣のアームとの間に噛み込んだり、折れ曲がったりするおそれがある。
【0007】
また、先端アームのコネクタに内部配線・内部配管を接続する際には、先端アームを隣のアームからある程度離しておく必要がある。そのため、内部配線・内部配管の長さはある程度長めに設定しておく必要がある。しかしながら、内部配線・内部配管の長さが長いと、先端アームを隣のアームに組み付ける際に、内部配線・内部配管が大きく折れ曲がり易く、そのため噛み込みも生じ易いと考えられる。
【0008】
本発明は、上記事情に鑑みてなされたものであり、先端アームの組み付けの際に、配線や配管の噛み込みや折れが発生するのを抑制することができるロボットを提供することを主たる目的とするものである。
【課題を解決するための手段】
【0009】
上記課題を解決すべく、第1の発明は、互いに連結された複数のアームを備え、前記複数のアームには、エンドエフェクタが取り付けられる有底筒状の先端アームと、前記先端アームに隣接する隣接アームとが含まれており、前記先端アームには、配線部又は配管部のいずれかである線状部が接続される接続部が設けられ、前記接続部には、前記エンドエフェクタ側から延びる前記線状部が接続可能とされているとともに、前記隣接アームの内部から前記先端アームの内部へ延びる前記線状部が内部線状部として接続されるロボットであって、前記先端アームは、前記隣接アームに連結され、前記接続部が設けられた筒状体と、前記筒状体の先端開口を塞ぎ、前記エンドエフェクタが取り付けられる蓋部とを有し、前記筒状体と前記蓋部とは、互いに別体として形成され、固定具を用いて互いに固定されている。
【0010】
第1の発明によれば、先端アームが、先端アームに隣接する隣接アームに連結された筒状体と、筒状体の先端開口を塞ぐ蓋部とを有している。蓋部にはエンドエフェクタが取り付けられ、筒状体にはエンドエフェクタ側から延びる線状部(配線部又は配管部)を接続可能な接続部が設けられている。また、接続部には、隣接アームの内部から先端アームの内部へ延びる内部線状部が接続される。なお、「エンドエフェクタ側から延びる線状部」には、エンドエフェクタから延びる線状部に加え、エンドエフェクタに付随する機器から延びる線状部が含まれる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
5か月前
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
18日前
株式会社ツノダ
挟持工具
2か月前
株式会社ツノダ
挟持工具
1か月前
個人
ペットボトル用蓋開け具。
6か月前
UTM株式会社
搬送装置
5か月前
川崎重工業株式会社
ハンド
2か月前
株式会社右川ゴム製造所
把持装置
27日前
個人
ロボットシステム
4か月前
トヨタ自動車株式会社
関節機構
4か月前
株式会社不二越
ロボット
6か月前
学校法人立命館
ロボットハンド
1か月前
株式会社不二越
ロボット
4か月前
学校法人立命館
グリッパ
1か月前
トヨタ自動車株式会社
関節機構
5か月前
個人
作業台
5か月前
オムロン株式会社
ロボットハンド
6か月前
個人
プーリーキー抜き治具
1か月前
株式会社不二越
予測システム
2か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社ダイヘン
情報処理装置
27日前
株式会社ダイヘン
画像生成装置
27日前
工機ホールディングス株式会社
作業機
4か月前
株式会社ダイヘン
画像生成装置
27日前
国立大学法人東北大学
剛性可変連結体
5か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
2か月前
小倉クラッチ株式会社
ロボットハンド
4か月前
株式会社中村製作所
トルクドライバー
1か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社共和製作所
ロボット用アーム
5日前
工機ホールディングス株式会社
作業機
3か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ


































