TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2023140218
公報種別
公開特許公報(A)
公開日
2023-10-04
出願番号
2022046138
出願日
2022-03-22
発明の名称
自動搬送車
出願人
株式会社リコー
代理人
個人
主分類
B61B
13/00 20060101AFI20230927BHJP(鉄道)
要約
【課題】自身が搬送する台車に応じて、自身の障害物検知範囲を設定することが可能な自動搬送車を提供する。
【解決手段】自動搬送車は、搬送台車と着脱可能に連結されて、自車の周囲の障害物を検知する測域センサと、測域センサの検知結果に基づいて、当該測域センサの障害物検知範囲を変更可能な制御部と、を備える。
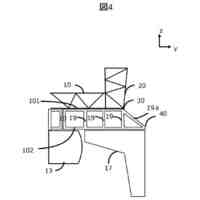
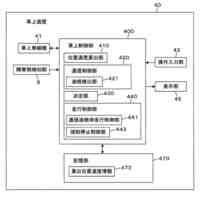
【選択図】図4
特許請求の範囲
【請求項1】
搬送台車と着脱可能に連結されて、自車の周囲の障害物を検知する測域センサと、前記測域センサの検知結果に基づいて、当該測域センサの障害物検知範囲を変更可能な制御部と、を備える、
自動搬送車。
続きを表示(約 240 文字)
【請求項2】
前記搬送台車の底部に潜り込んで、当該搬送台車を持ち上げる昇降部を、更に備える、
請求項1に記載の自動搬送車。
【請求項3】
前記制御部は、予め記憶された、前記搬送台車が有する脚部の位置と当該搬送台車の概形と、前記測域センサが検知した前記搬送台車の脚部の位置と、に基づいて、自車が搬送している搬送台車の種類を推定し、前記搬送台車の推定結果に基づいて、前記測域センサの障害物検知範囲を設定する、
請求項1又は請求項2に記載の自動搬送車。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動搬送車に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
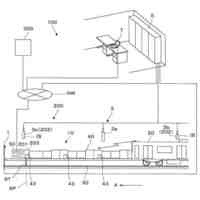
生産ラインや自動倉庫などで使用される搬送システムにおいては、物品の搬送のために、自動搬送車や移動ロボットがしばしば用いられる。また、近年では低床型のAGV(Automatic Guided Vehicle)を用いて台車に潜り込んでの運搬や、AGVの上部にコンベヤやロボットなどの移載部を設け、荷物の運搬や移載をすることも多い。これらの自動搬送車や移動ロボットは、走行時における安全性を考慮して障害物を検知するための検知部や、接触を検知する安全装置などを搭載している。しかし、自動搬送車の搬送物や積み荷の大きさによっては、AGVが搬送する台車やコンベヤなどが車体幅よりも大きくなる場合が多くあり、その際に障害物検知の領域が一部制限されることにより障害物が正しく検知できなくなることや、安全装置の範囲外で周辺の作業者や障害物と接触した場合に周囲に損傷を与える可能性がある。
【0003】
このような課題に対応するため、例えば、特許文献1には、台車に、障害物と接触した際に無人搬送装置の障害物検知範囲に入り込むように可動する可動部を設置した無人搬送装置が開示されている。
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に開示された無人搬送装置では、全ての台車に可動部を設置する必要があるため、コストが上昇するという問題があった。
【0005】
本発明は、上記に鑑みてなされたものであって、自身が搬送する台車に応じて、自身の障害物検知範囲を設定することが可能な自動搬送車を提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、本発明の自動搬送車は、搬送台車と着脱可能に連結される搬送自動車と、周囲の物理的な形状データを計測する測域センサと、当該測域センサの計測結果に基づいて、障害物検知範囲を変更可能な制御部と、を備えることを特徴とする。
【発明の効果】
【0007】
本発明によれば、自身が搬送する台車に応じて、自身の障害物検知範囲を設定することができる。
【図面の簡単な説明】
【0008】
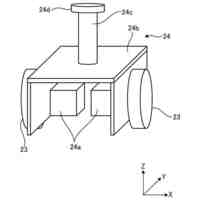
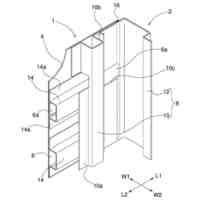
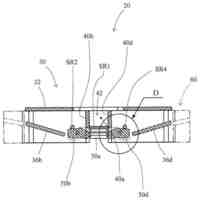
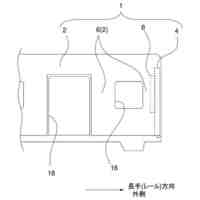
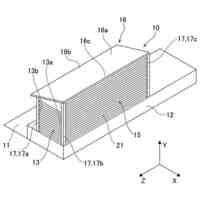
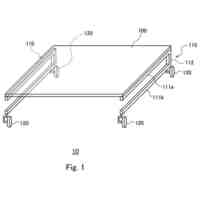
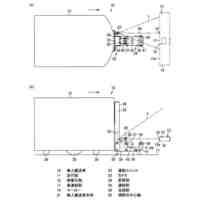
図1Aは、実施形態に係る自動搬送車の概略構成を示す正面図である。
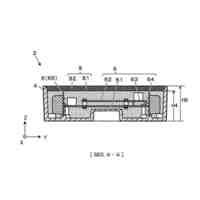
図1Bは、実施形態に係る自動搬送車の概略構成を示す側面図である。
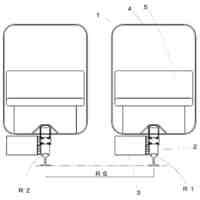
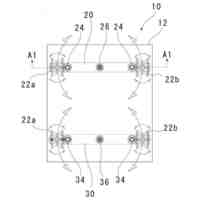
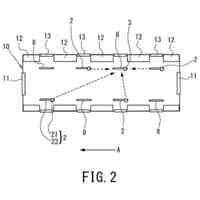
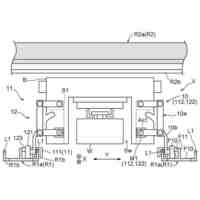
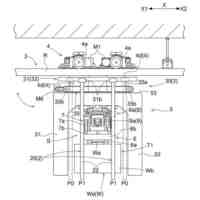
図2Aは、実施形態に係る自動搬送車が搬送台車と連結した状態を示す正面図である。
図2Bは、実施形態に係る自動搬送車が搬送台車と連結した状態を示す側面図である。
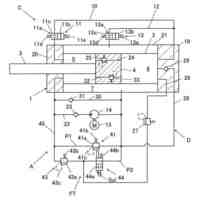
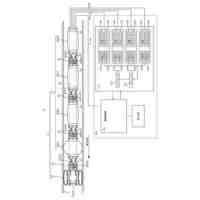
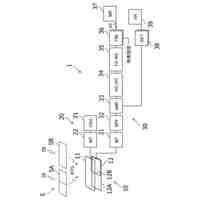
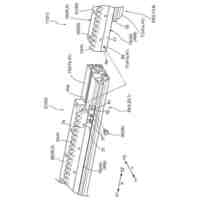
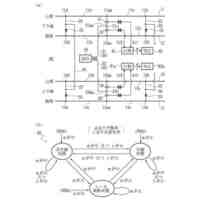
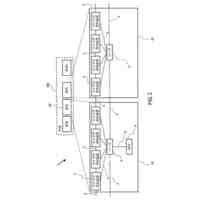
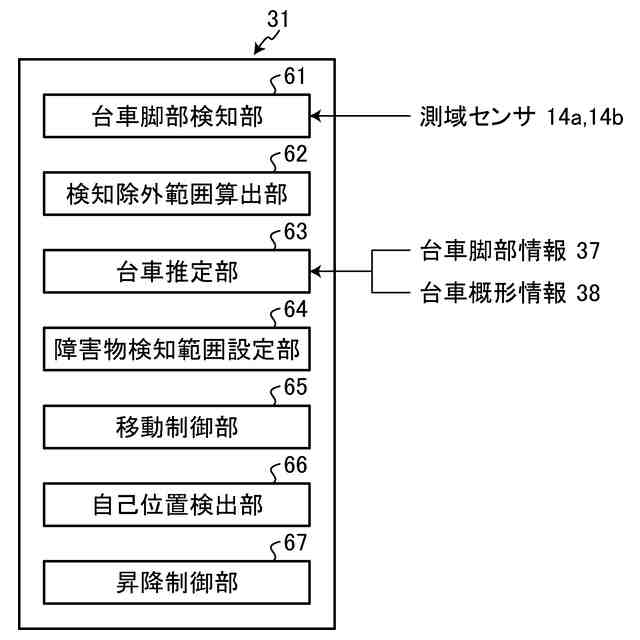
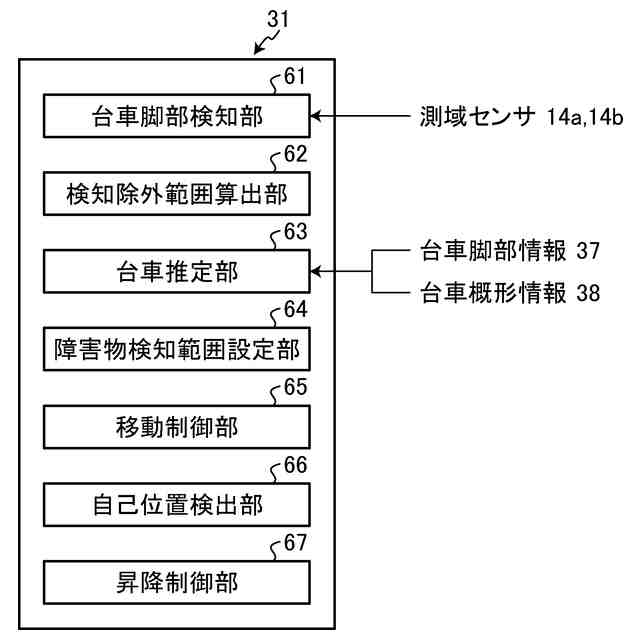
図3は、実施形態に係る自動搬送車のハードウエア構成の一例を示すハードウエアブロック図である。
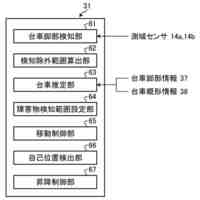
図4は、実施形態に係る自動搬送車の機能構成の一例を示す機能ブロック図である。
図5は、測域センサの障害物検知範囲を説明する図である。
図6Aは、測域センサの障害物検知範囲の中に、搬送台車の脚部が存在する様子の一例を示す図である。
図6Bは、図6Aの状態において、測域センサが出力する出力信号の一例を示す図である。
図7は、自動搬送車が搬送台車を連結した際に検知される脚部の配置の一例を示す図である。
図8は、図7の状態にある場合に、本実施形態に係る自動搬送車が設定する障害物検知除外範囲の一例を示す図である。
図9は、自動搬送車が行う障害物検知範囲設定処理の流れの一例を示すフローチャートである。
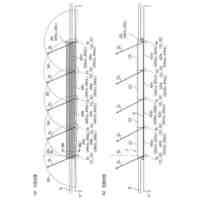
図10Aは、実施形態に係る自動搬送車が前進している際の、障害物検知範囲及び障害物検知除外範囲の移動状態の一例を示す図である。
図10Bは、実施形態に係る自動搬送車が旋回している際の、障害物検知範囲及び障害物検知除外範囲の移動状態の一例を示す図である。
【発明を実施するための形態】
【0009】
以下に添付図面を参照して、自動搬送車の実施形態を詳細に説明する。
【0010】
(自動搬送車の概略構成)
図1A,図1Bを用いて、本実施形態に係る自動搬送車10の概略構成を説明する。図1Aは、実施形態に係る自動搬送車の概略構成を示す正面図である。図1Bは、実施形態に係る自動搬送車の概略構成を示す側面図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社リコー
運搬装置
7か月前
個人
鉄道車両の脱線防止の構造
2か月前
株式会社リコー
自動搬送車
7か月前
KYB株式会社
シリンダ装置
8か月前
日本信号株式会社
地上子
2か月前
個人
車両間乗降システム
1か月前
近畿車輌株式会社
鉄道車両の構体
8か月前
個人
磁気誘導路の移動体車両の自動運転
7か月前
株式会社ソラリス
管内検査ロボット
3か月前
オムロン株式会社
転落検知システム
15日前
株式会社椿本チエイン
牽引装置
5か月前
愛知機械テクノシステム株式会社
台車
1か月前
日本信号株式会社
列車検知装置
2か月前
日本信号株式会社
信号システム
2か月前
日本ケーブル株式会社
索道の空調装置付搬器
2か月前
近畿車輌株式会社
鉄道車両の側壁構造
7か月前
株式会社 空スペース
跨座式モノレール車両
1か月前
株式会社ダイフク
レール
2か月前
コイト電工株式会社
カメラ設置ケース
3か月前
公益財団法人鉄道総合技術研究所
上屋
2か月前
株式会社ロッソ
移動体および移動体群
7か月前
大同信号株式会社
レール破断検知装置
4か月前
株式会社ダイフク
搬送車
3か月前
日本信号株式会社
制動支援装置
8か月前
株式会社MCS
車両監視システム
7か月前
株式会社京三製作所
地上子
16日前
株式会社MCS
車両監視システム
7か月前
トヨタ自動車株式会社
自動運搬システム
7か月前
個人
線路上落とし物回収バネ、粘着付きポール
2か月前
株式会社ダイフク
走行設備
5か月前
株式会社日立製作所
鉄道車両
5か月前
三菱電機株式会社
無線通信システム
5か月前
オークラ輸送機株式会社
無人搬送車
1か月前
株式会社京三製作所
車上装置
4か月前
ナブテスコ株式会社
ホームドア装置
7か月前
株式会社ダイフク
物品搬送車
3か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ