TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2023133873
公報種別
公開特許公報(A)
公開日
2023-09-27
出願番号
2022039113
出願日
2022-03-14
発明の名称
自動運搬システム
出願人
トヨタ自動車株式会社
代理人
個人
主分類
B61B
13/00 20060101AFI20230920BHJP(鉄道)
要約
【課題】荷台の脚の間隔よりも大きい幅を有する自律移動ロボットを荷台に潜り込ませることができる自動運搬システムを提供する。
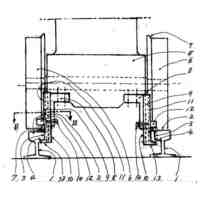
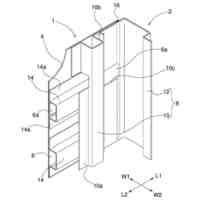
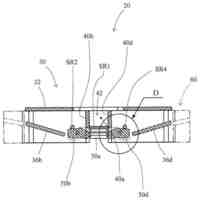
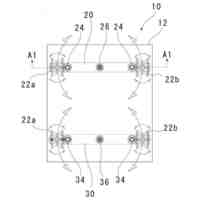
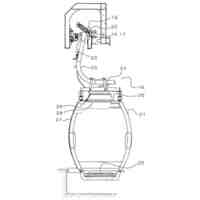
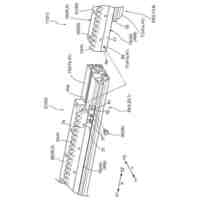
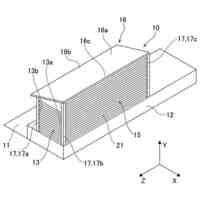
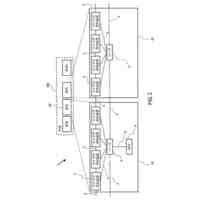
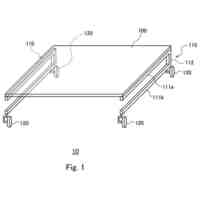
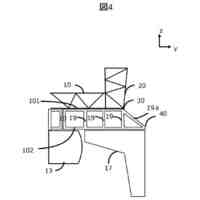
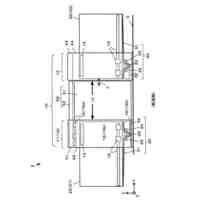
【解決手段】自動運搬システムは、荷台10の下方に自律移動ロボット20が進入することにより、前記荷台10を搬送する自動運搬システムであって、前記荷台10は、底面のサイドに複数の脚部を有し、前記複数の脚部の少なくとも一つは、U字型部材110を有し、前記U字型部材110は、前記U字型部材110の開口側の2つの端部が鉛直方向に並ぶように設置されている。
【選択図】図1
特許請求の範囲
【請求項1】
荷台の下方に自律移動ロボットが進入することにより、前記荷台を搬送する自動運搬システムであって、
前記荷台は、底面のサイドに複数の脚部を有し、
前記複数の脚部の少なくとも一つは、U字型部材を有し、
前記U字型部材は、前記U字型部材の開口側の2つの端部が鉛直方向に並ぶように設置されている
自動運搬システム。
続きを表示(約 670 文字)
【請求項2】
前記U字型部材を有する前記脚部が、前記底面の両サイドにそれぞれ設けられている
請求項1に記載の自動運搬システム。
【請求項3】
前記底面の両サイドの2つの前記U字型部材は、開口する方向が同じとなるように設けられている
請求項2に記載の自動運搬システム。
【請求項4】
前記底面の両サイドの2つの前記U字型部材は、開口する方向が逆になるように設けられている
請求項2に記載の自動運搬システム。
【請求項5】
前記底面の一方のサイドに前記U字型部材を有する前記脚部が設けられ、前記底面の他方のサイドにリング型部材を有する前記脚部が設けられている
請求項1に記載の自動運搬システム。
【請求項6】
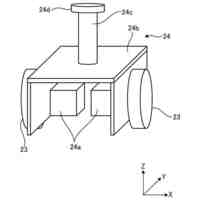
前記自律移動ロボットは、前記U字型部材に挿入されるプレートを有し、
前記プレートの端部にセンサが設けられている
請求項1乃至5のいずれか一項に記載の自動運搬システム。
【請求項7】
前記自律移動ロボットは、前記U字型部材に挿入される第1のプレートと、前記第1のプレートの端に立設された第2のプレートとを有する
請求項1乃至6のいずれか一項に記載の自動運搬システム。
【請求項8】
前記自律移動ロボットは、前記U字型部材に挿入されるプレートを有し、
前記プレートの端部の下方に、前記自律移動ロボットの車輪が設けられている
請求項3に記載の自動運搬システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は自動運搬システムに関し、特に自律移動ロボットによる運搬に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
近年、工場や倉庫などにおいて、自律移動ロボットにより物を運搬するための技術が開発されている。例えば、特許文献1は、周囲の空間をセンシングしてセンサデータを取得するための外界センサを備えたAGVが、荷台の下に潜り込んで、荷台を運搬する技術について開示している。
【先行技術文献】
【特許文献】
【0003】
特開2019-148871号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
一般的には、特許文献1に開示されているように、荷台を運搬するためにロボットが荷台の下に潜り込む場合、荷台の脚の間隔よりも狭い幅のロボットを用いる必要がある。
【0005】
本開示は、上記した事情を背景としてなされたものであり、荷台の脚の間隔よりも大きい幅を有する自律移動ロボットを荷台に潜り込ませることができる自動運搬システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
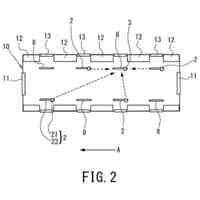
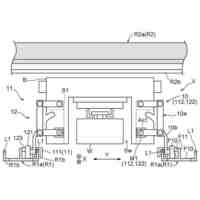
上記目的を達成するための本開示の一態様は、荷台の下方に自律移動ロボットが進入することにより、前記荷台を搬送する自動運搬システムであって、前記荷台は、底面のサイドに複数の脚部を有し、前記複数の脚部の少なくとも一つは、U字型部材を有し、前記U字型部材は、前記U字型部材の開口側の2つの端部が鉛直方向に並ぶように設置されている自動運搬システムである。
この自動運搬システムによれば、荷台にU字型部材が設けられているため、荷台の脚の間隔より大きい幅を有する自律移動ロボットを荷台に潜り込ませることができる。このため、使用するロボットの選択における自由度が向上する。
【0007】
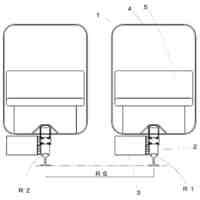
上記の一態様において、前記U字型部材を有する前記脚部が、前記底面の両サイドにそれぞれ設けられていてもよい。
このような構成によれば、両サイドにおいて自律移動ロボットが荷台からはみ出ることが可能であるため、より大きい幅を有する自律移動ロボットを荷台に潜り込ませることができる。
【0008】
上記の一態様において、前記底面の両サイドの2つの前記U字型部材は、開口する方向が同じとなるように設けられていてもよい。
このような構成によれば、開口の方向が同じであるため、開口する方向が同じでない場合に比べて、自律移動ロボットは容易に荷台に潜り込むことができる。
【0009】
上記の一態様において、前記底面の両サイドの2つの前記U字型部材は、開口する方向が逆になるように設けられていてもよい。
このような構成によれば、自律移動ロボットは2つの方向から荷台に潜り込むことができる。
【0010】
上記の一態様において、前記底面の一方のサイドに前記U字型部材を有する前記脚部が設けられ、前記底面の他方のサイドにリング型部材を有する前記脚部が設けられていてもよい。
このような構成によれば、両サイドにおいて自律移動ロボットが荷台からはみ出ることが可能であるため、より大きい幅を有する自律移動ロボットを荷台に潜り込ませることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
鉄道車両の脱線防止の構造
2か月前
株式会社リコー
運搬装置
7か月前
株式会社リコー
自動搬送車
7か月前
KYB株式会社
シリンダ装置
8か月前
個人
車両間乗降システム
1か月前
日本信号株式会社
地上子
2か月前
近畿車輌株式会社
鉄道車両の構体
8か月前
個人
磁気誘導路の移動体車両の自動運転
7か月前
株式会社ソラリス
管内検査ロボット
3か月前
オムロン株式会社
転落検知システム
15日前
株式会社ダイフク
搬送車
3か月前
日本信号株式会社
信号システム
2か月前
愛知機械テクノシステム株式会社
台車
1か月前
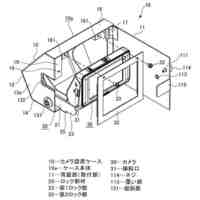
コイト電工株式会社
カメラ設置ケース
3か月前
株式会社ロッソ
移動体および移動体群
7か月前
株式会社椿本チエイン
牽引装置
5か月前
日本ケーブル株式会社
索道の空調装置付搬器
2か月前
日本信号株式会社
制動支援装置
8か月前
株式会社 空スペース
跨座式モノレール車両
1か月前
日本信号株式会社
列車検知装置
2か月前
株式会社ダイフク
レール
2か月前
公益財団法人鉄道総合技術研究所
上屋
2か月前
近畿車輌株式会社
鉄道車両の側壁構造
7か月前
大同信号株式会社
レール破断検知装置
4か月前
株式会社MCS
車両監視システム
7か月前
トヨタ自動車株式会社
自動運搬システム
7か月前
個人
線路上落とし物回収バネ、粘着付きポール
2か月前
株式会社MCS
車両監視システム
7か月前
株式会社日立製作所
鉄道車両
5か月前
株式会社京三製作所
地上子
16日前
株式会社ダイフク
走行設備
5か月前
日本製鉄株式会社
鉄道車両
1か月前
株式会社京三製作所
ホーム柵
16日前
株式会社京三製作所
ホーム柵
16日前
オークラ輸送機株式会社
無人搬送車
1か月前
ナブテスコ株式会社
ホームドア装置
7か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ