TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025179290
公報種別
公開特許公報(A)
公開日
2025-12-10
出願番号
2024085931
出願日
2024-05-28
発明の名称
情報処理装置及び情報処理方法
出願人
アズビル株式会社
代理人
弁理士法人山王内外特許事務所
主分類
G01B
11/00 20060101AFI20251203BHJP(測定;試験)
要約
【課題】従来よりもワークの移動距離の算出結果の精度を向上させることができる情報処理装置及び情報処理方法を提供する。
【解決手段】情報処理装置(100)は、ワーク(W1)の第2方向(D2)に沿った1次元の光学情報を取得する光学情報取得部(10)と、互いに異なる2つの時刻に取得された光学情報の相関を示す相関値を算出する相関値算出部(20)と、相関値算出部(20)によって算出された相関値に基づいて、第1方向(D1)と第2方向(D2)との成す角度を推定する角度推定部(30)と、を備えた。
【選択図】図1
特許請求の範囲
【請求項1】
第1方向に移動するワークからの光に基づいて、前記ワークの第2方向に沿った1次元の光学情報を取得する光学情報取得部と、
前記光学情報取得部によって互いに異なる2つの時刻に取得された光学情報の相関を示す相関値を算出する相関値算出部と、
前記相関値算出部によって算出された相関値に基づいて、前記第1方向と前記第2方向との成す角度を推定する角度推定部と、を備えた
ことを特徴とする情報処理装置。
続きを表示(約 1,100 文字)
【請求項2】
前記角度推定部は、前記第1方向と前記第2方向との成す角度が第1角度である状態で前記相関値算出部によって算出された第1相関値と、前記第1方向と前記第2方向との成す角度が前記第1角度とは異なる第2角度である状態で前記相関値算出部によって算出された第2相関値と、前記第1方向と前記第2方向との成す角度が第3角度である状態で前記相関値算出部によって算出された第3相関値と、に基づいて前記第3角度を推定する
ことを特徴とする請求項1記載の情報処理装置。
【請求項3】
前記角度推定部は、前記第1相関値及び前記ワークの前記第2方向への移動距離との関係を示す第1関数と、前記第2相関値及び前記ワークの前記第2方向への移動距離との関係を示す第2関数と、前記第3相関値及び前記ワークの前記第2方向への移動距離との関係を示す第3関数と、を回帰分析によって算出し、前記第1角度、前記第2角度、前記第1関数、前記第2関数、前記第3関数に基づいて、前記第3角度を推定する
ことを特徴とする請求項2記載の情報処理装置。
【請求項4】
前記角度推定部は、前記第1関数、前記第2関数及び前記第3関数を線形回帰分析によって算出する
ことを特徴とする請求項3記載の情報処理装置。
【請求項5】
前記光学情報取得部によって取得された光学情報に基づいて前記ワークの前記第2方向への移動距離を算出し、かつ前記ワークの前記第2方向への移動距離と、前記角度推定部によって推定された角度と、に基づいて、前記ワークの前記第1方向への移動距離を算出する移動距離算出部を備えた
ことを特徴とする請求項1から4のいずれか1項記載の情報処理装置。
【請求項6】
前記移動距離算出部は、前記ワークの前記第2方向への移動距離と前記第3角度とに基づいて、前記ワークの前記第1方向への移動距離を算出する
ことを特徴とする請求項5記載の情報処理装置。
【請求項7】
光学情報取得部と、相関値算出部と、角度推定部と、移動距離算出部と、を備えた装置が行う情報処理方法であって、
前記光学情報取得部が、第1方向に移動するワークからの光に基づいて、前記ワークの第2方向に沿った1次元の光学情報を取得するステップと、
前記相関値算出部が、前記光学情報取得部によって互いに異なる2つの時刻に取得された光学情報の相関を示す相関値を算出するステップと、
前記角度推定部が、前記相関値算出部によって算出された相関値に基づいて、前記第1方向と前記第2方向との成す角度を推定するステップと、を備えた
ことを特徴とする情報処理方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、情報処理装置及び情報処理方法に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
従来、搬送装置で搬送される測定対象物(ワーク)からの反射光を検出するラインセンサからの1次元の情報に基づいて、測定対象物の変位(移動距離)を計測する変位計が開示されている(例えば、特許文献1参照)。この変位計は、ラインセンサにより異なるタイミングで検出された複数の画像の相互相関関数の極値(ピーク)を検出し、検出結果に基づいて測定対象物の変位量を算出している。
【先行技術文献】
【特許文献】
【0003】
特開2022-170550号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、移動するワークの表面の情報を1次元の光学情報として取得し、取得された複数の1次元の光学情報の相関に基づいてワークの移動距離を算出する場合において、ワークの移動方向と当該1次元の光学情報を取得する方向とを完全に平行にすることは難しい。また、ワークの移動方向と当該1次元の光学情報を取得する方向とが平行でない場合、移動距離の算出結果には、ワークの移動方向と当該1次元の光学情報を取得する方向との成す角度に応じた誤差が含まれるため、移動距離の算出結果の精度を向上させることが難しいという課題がある。
【0005】
本開示は、上記課題の認識を契機としてなされたものであって、従来よりもワークの移動距離の算出結果の精度を向上させることができる情報処理装置及び情報処理方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示に係る情報処理装置は、第1方向に移動するワークからの光に基づいて、ワークの第2方向に沿った1次元の光学情報を取得する光学情報取得部と、光学情報取得部によって互いに異なる2つの時刻に取得された光学情報の相関を示す相関値を算出する相関値算出部と、相関値算出部によって算出された相関値に基づいて、第1方向と第2方向との成す角度を推定する角度推定部と、を備えたことを特徴とする。
【発明の効果】
【0007】
本開示によれば、従来よりもワークの移動距離の算出結果の精度を向上させることができる。
【図面の簡単な説明】
【0008】
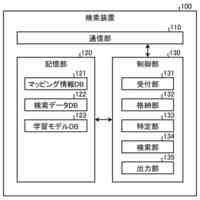
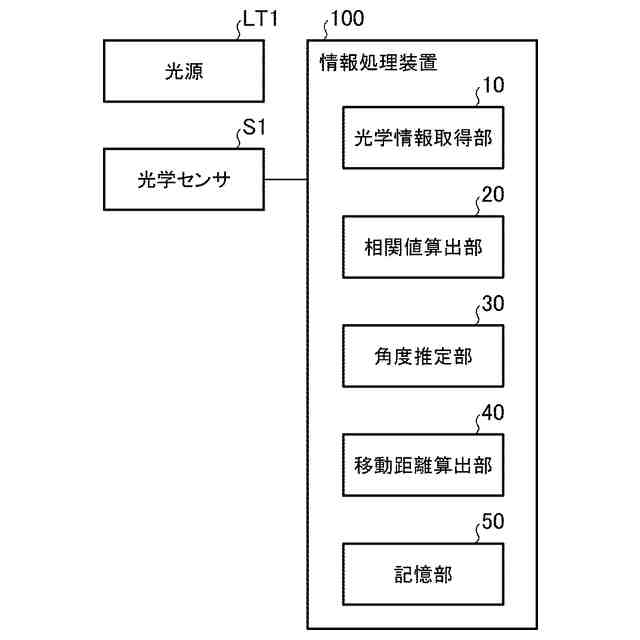
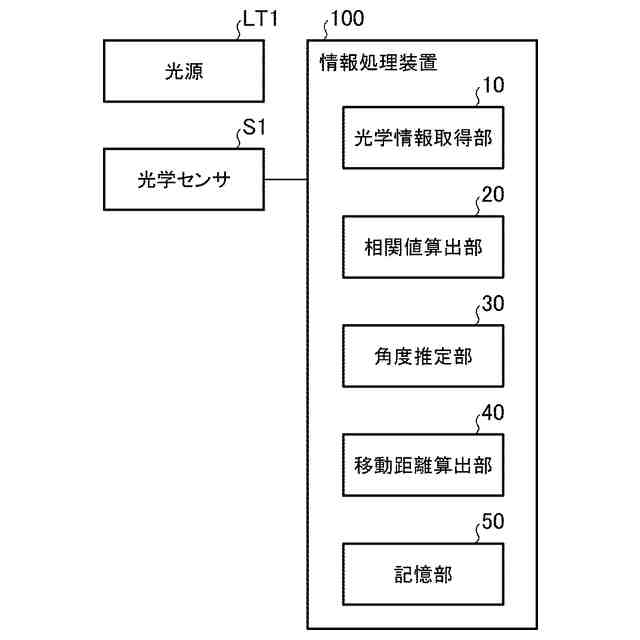
実施の形態1に係る情報処理システムの概略構成を示すブロック図である。
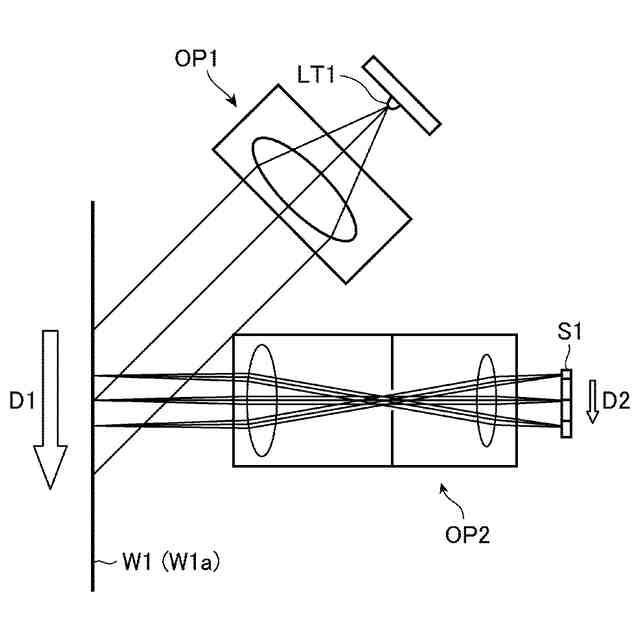
実施の形態1に係る光学系を示す模式図である。
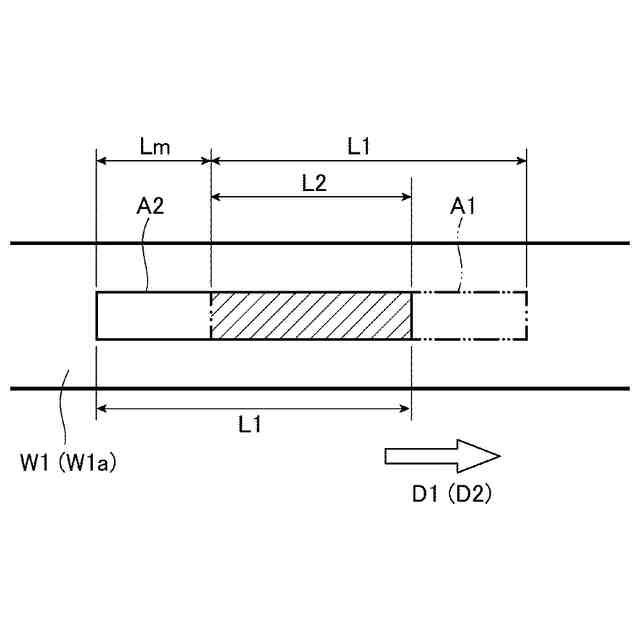
実施の形態1に係る光学センサによって、移動方向と測定方向とが平行である状態で取得された光学情報を示すワークの表面に直交する方向から視た模式図である。
実施の形態1に係る情報処理装置によって取得された光学情報を示すグラフである。
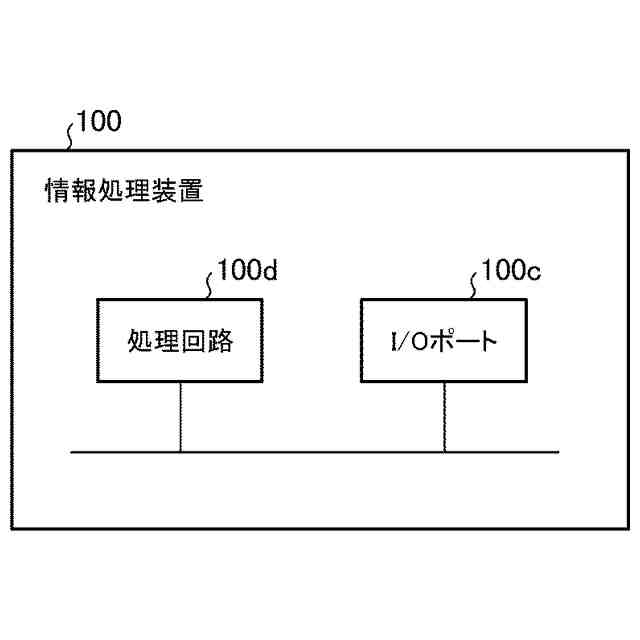
実施の形態1に係る情報処理装置のハードウェア構成の一例を示す図である。
実施の形態1に係る情報処理装置のハードウェア構成の一例を示す図である。
実施の形態1に係る情報処理装置が行う回帰関数算出処理を示すフローチャートである。
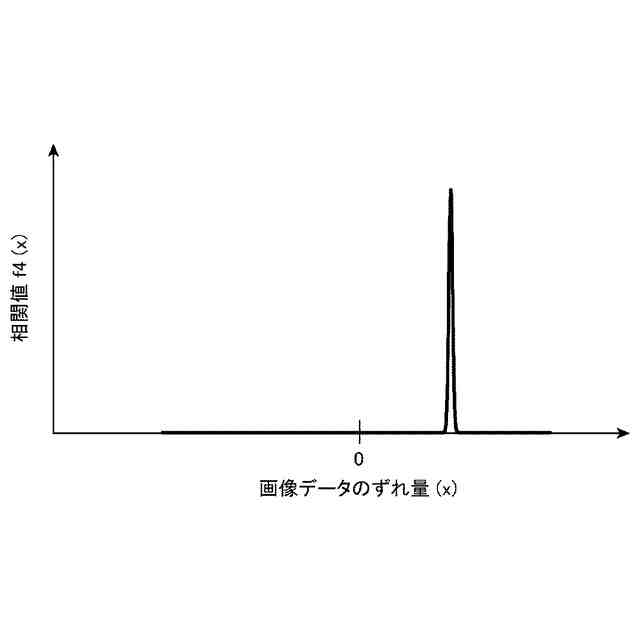
実施の形態1に係る情報処理装置が算出する相関値と光学情報のずれ量との関係を示すグラフである。
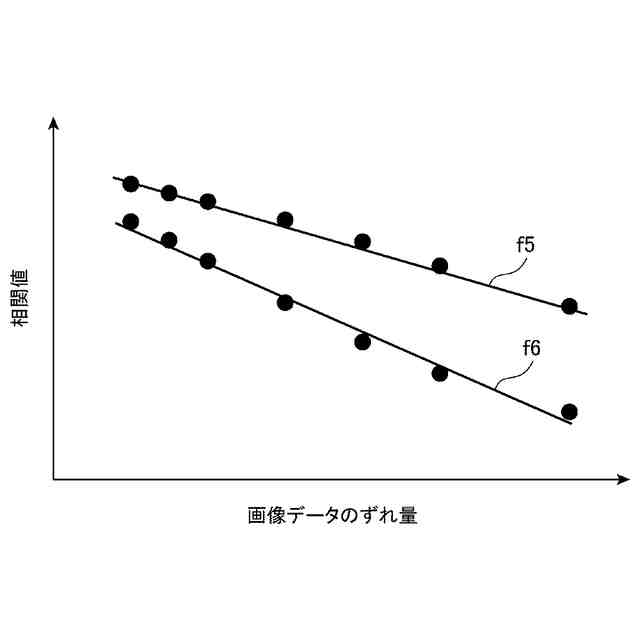
実施の形態1に係る情報処理装置が算出する回帰関数を示すグラフである。
実施の形態1に係る情報処理装置によって、移動方向と測定方向とが平行でない状態で取得された光学情報を示すワークの表面に直交する方向から視た模式図である。
実施の形態1に係る情報処理装置が行う移動距離算出処理を示すフローチャートである。
実施の形態1の変形例に係る情報処理装置が行う角度推定処理を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、本開示に係る実施の形態について図面を参照しながら詳細に説明する。
実施の形態1.
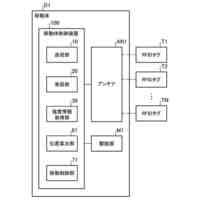
まず、図1及び図2を参照して、実施の形態1に係る情報処理システムの構成について説明する。図1は、実施の形態1に係る情報処理システムを示す模式図である。実施の形態1に係る情報処理システムは、光学センサS1からの光学情報に基づいて移動するワークW1の移動距離を算出することで、ワークW1の移動距離を測定するためのシステムである。例えば、測定対象物であるワークW1は、シート状に形成されており、ロール状に巻き取られた状態から引出されながら、又はロール状に巻き取られながら、ロールの回転に伴って一方向に移動する。図1に示すように、実施の形態1に係る情報処理システムは、光源LT1及び光学センサS1を備える光学系と、情報処理装置100と、を備えており、光学センサS1から情報処理装置100へ情報を通信可能になるように有線又は無線によって電気的に接続されて構成されている。
【0010】
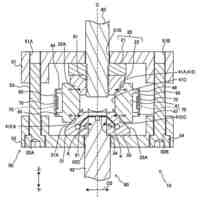
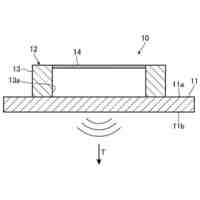
図2は、実施の形態1に係る光学系を示す模式図である。図2に示すように、実施の形態1に係る光学系は、例えば、光源LT1、集光レンズOP1、結像レンズOP2、及び光学センサS1を備えている。光源LT1は、例えば、LED(Light-Emitting Diode)又はハロゲンランプ等によって構成されており、電力の供給によって発光する。集光レンズOP1は、単レンズ又は複合レンズによって構成されており、光源LT1からの光をワークW1に集光し、ワークW1の表面W1aを照明する。結像レンズOP2は、単レンズ又は複合レンズによって構成されており、ワークW1の表面W1aからの反射光を光学センサS1に結像する。例えば、結像レンズOP2は、ワークW1の表面W1aからの反射光を光学センサS1に結像するテレセントリックレンズによって構成されている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
アズビル株式会社
連結装置
2日前
アズビル株式会社
連結装置
2日前
アズビル株式会社
圧力センサ
2か月前
アズビル株式会社
電磁流量計
1か月前
アズビル株式会社
ケージ調整弁
2日前
アズビル株式会社
間欠動作制御回路
1か月前
アズビル株式会社
動粘度測定システム
2か月前
アズビル株式会社
電磁流量計の励磁回路
1日前
アズビル株式会社
位置計測装置および方法
1か月前
アズビル株式会社
タービン式流量制御装置
1日前
アズビル株式会社
制御装置および制御方法
1か月前
アズビル株式会社
熱式流量計および補正方法
2か月前
アズビル株式会社
情報処理システムおよび方法
2か月前
アズビル株式会社
制御装置、および、制御方法
6日前
アズビル株式会社
情報処理装置及び情報処理方法
1日前
アズビル株式会社
換気制御装置及び換気制御方法
2か月前
アズビル株式会社
空調制御装置及び空調制御方法
1か月前
アズビル株式会社
情報処理装置及び情報処理方法
2日前
アズビル株式会社
情報処理装置および情報処理方法
13日前
アズビル株式会社
ビル管理装置、及び、プログラム
1か月前
アズビル株式会社
移動体制御装置及び移動体制御方法
2日前
アズビル株式会社
ディスパッチ計画作成装置および方法
1か月前
アズビル株式会社
連結装置、及び、連結装置の製造方法
2日前
アズビル株式会社
制御装置、制御方法及び制御システム
13日前
アズビル株式会社
処理装置、処理方法、及び、プログラム
2か月前
アズビル株式会社
移動速度演算装置及び移動速度演算方法
2日前
アズビル株式会社
超音波トランスデューサ及び超音波流量計
2日前
アズビル株式会社
分割装置、分割方法、および分割プログラム
2か月前
アズビル株式会社
検索装置、検索方法、および検索プログラム
2か月前
アズビル株式会社
超音波流量計及び超音波流量計の取り付け方法
1か月前
アズビル株式会社
モータ駆動制御装置及びモータの駆動制御方法
6日前
アズビル株式会社
情報処理装置、情報処理方法及び情報処理プログラム
1か月前
アズビル株式会社
電極材料選定装置および方法ならびに電極選定支援装置
2か月前
アズビル株式会社
情報処理装置、情報処理方法および情報処理プログラム
2か月前
アズビル株式会社
直線変位検知システム、バルブポジショナ、バルブ開度計
2日前
アズビル株式会社
直線変位検知システム、バルブポジショナ、バルブ開度計
15日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ