TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025176904
公報種別
公開特許公報(A)
公開日
2025-12-05
出願番号
2024083294
出願日
2024-05-22
発明の名称
モータ駆動制御装置及びモータの駆動制御方法
出願人
アズビル株式会社
代理人
個人
主分類
H02P
6/24 20060101AFI20251128BHJP(電力の発電,変換,配電)
要約
【課題】モータの発熱や消費電力と装置の機械的な損傷とを抑える。
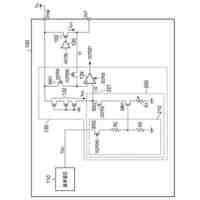
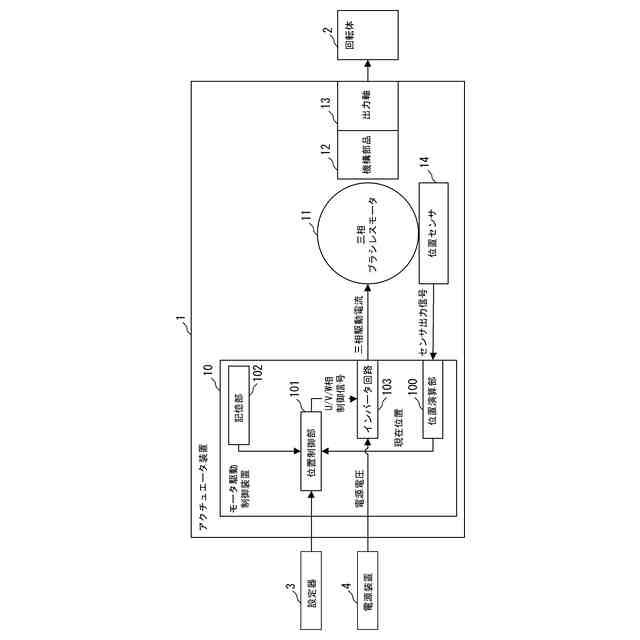
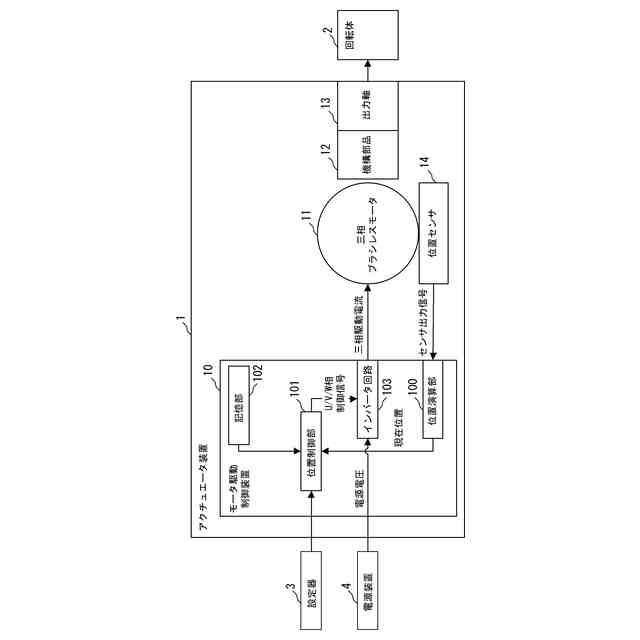
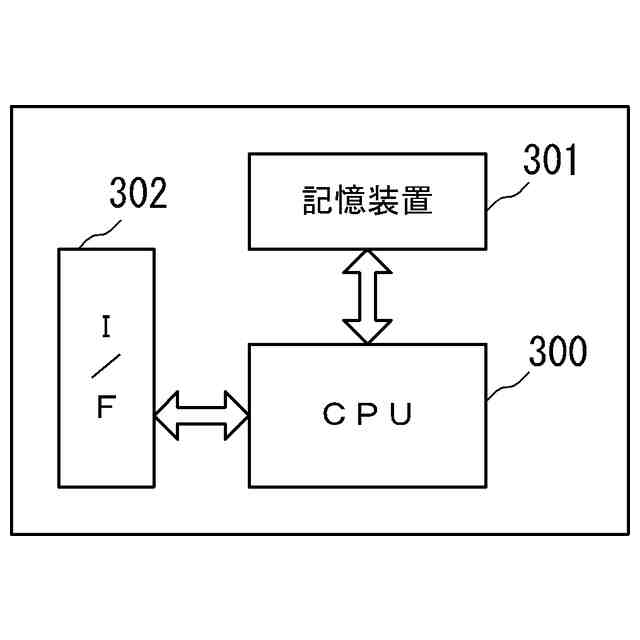
【解決手段】モータ駆動制御装置10は、位置センサ14の出力に基づいてモータ11のロータの現在位置を算出する位置演算部100と、ロータの目標停止位置と位置演算部100によって算出された現在位置との位置ずれ量を算出し、位置ずれ量に基づいてモータ11に流す電流の大きさを決定して、制御信号を出力する位置制御部101と、制御信号に応じてモータ11に電流を供給するインバータ回路103とを備える。位置制御部101は、位置ずれ量が不感帯内の場合には、モータ11に流す電流の大きさを最大許容電流よりも小さい所定値に決定し、位置ずれ量が不感帯から外れた場合には、モータ11に流す電流の大きさを位置ずれ量の大きさに応じた値に決定する。
【選択図】 図1
特許請求の範囲
【請求項1】
モータに取り付けられた位置センサの出力に基づいて前記モータのロータの現在位置を算出するように構成された位置演算部と、
前記ロータの目標停止位置と前記位置演算部によって算出された現在位置との位置ずれ量を算出し、算出した位置ずれ量に基づいて前記モータに流す電流の大きさを決定して、制御信号を出力するように構成された位置制御部と、
前記制御信号に応じて前記モータに電流を供給するように構成されたインバータ回路とを備え、
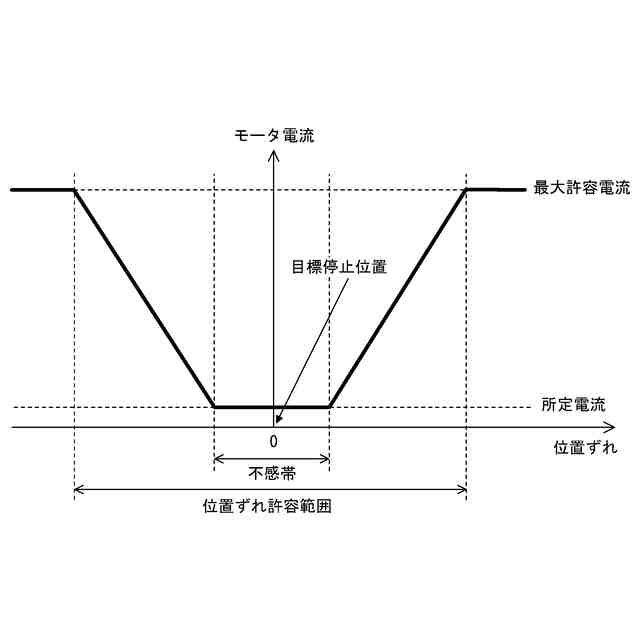
前記位置制御部は、前記位置ずれ量が不感帯内の場合には、前記モータに流す電流の大きさを前記モータの許容可能な最大許容電流よりも小さい所定値に決定し、前記位置ずれ量が前記不感帯から外れた場合には、前記モータに流す電流の大きさを前記位置ずれ量の大きさに応じた値に決定することにより、前記位置ずれ量を位置ずれ許容範囲内に留める制動トルクを発生させることを特徴とするモータ駆動制御装置。
続きを表示(約 1,100 文字)
【請求項2】
請求項1記載のモータ駆動制御装置において、
前記位置制御部は、前記位置ずれ量が前記不感帯から外れた場合には、前記位置ずれ量と前記所定値と前記不感帯と比例係数とによって決まる1次式によって、前記モータに流す電流の大きさを算出し、算出した電流の大きさが前記最大許容電流以上となった時点で、前記モータに流す電流の大きさを前記最大許容電流と等しくなるように制限することを特徴とするモータ駆動制御装置。
【請求項3】
請求項2記載のモータ駆動制御装置において、
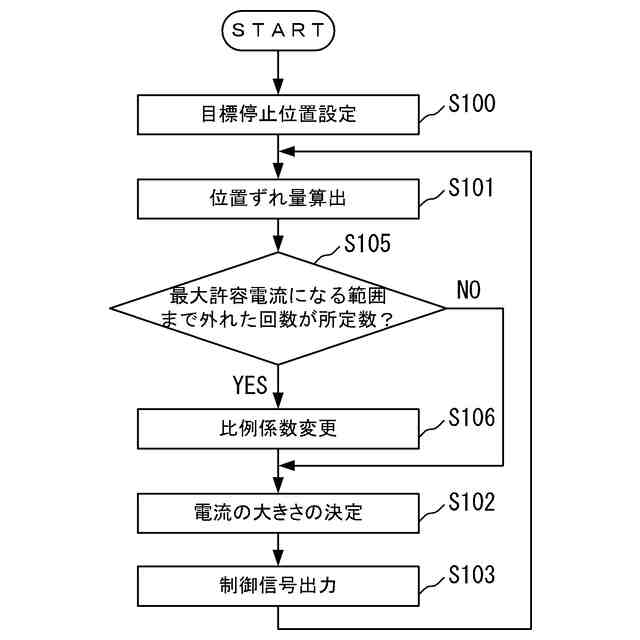
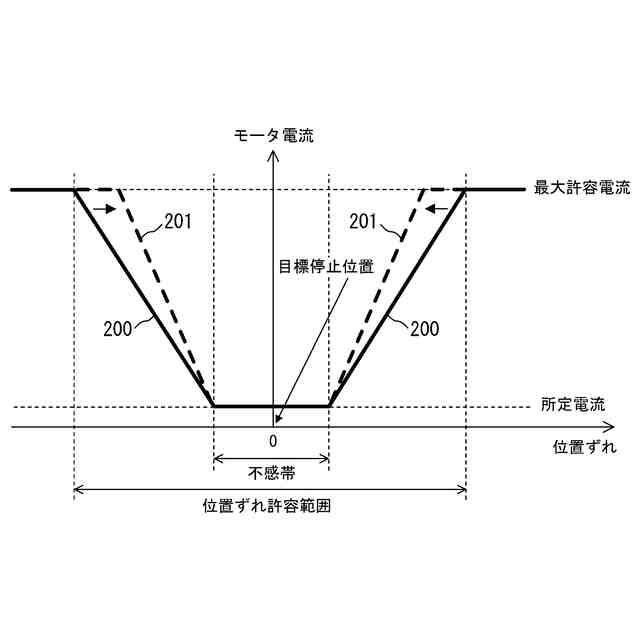
前記位置制御部は、前記位置ずれ量が前記不感帯内に最初に入った後に、前記モータに流す電流が前記最大許容電流になる範囲まで前記位置ずれ量が外れた回数をカウントし、カウントした回数が所定数に達したときに、前記比例係数を所定の変更幅だけ大きくすることを特徴とするモータ駆動制御装置。
【請求項4】
モータに取り付けられた位置センサの出力に基づいて前記モータのロータの現在位置を算出する第1のステップと、
前記ロータの目標停止位置と前記第1のステップで算出した現在位置との位置ずれ量を算出し、算出した位置ずれ量に基づいて前記モータに流す電流の大きさを決定して、制御信号を出力する第2のステップとを含み、
前記第2のステップは、前記位置ずれ量が不感帯内の場合には、前記モータに流す電流の大きさを前記モータの許容可能な最大許容電流よりも小さい所定値に決定し、前記位置ずれ量が前記不感帯から外れた場合には、前記モータに流す電流の大きさを前記位置ずれ量の大きさに応じた値に決定することにより、前記位置ずれ量を前記位置ずれ許容範囲内に留める制動トルクを発生させるステップを含むことを特徴とするモータの駆動制御方法。
【請求項5】
請求項4記載のモータの駆動制御方法において、
前記第2のステップは、前記位置ずれ量が前記不感帯から外れた場合には、前記位置ずれ量と前記所定値と前記不感帯と比例係数とによって決まる1次式によって、前記モータに流す電流の大きさを算出し、算出した電流の大きさが前記最大許容電流以上となった時点で、前記モータに流す電流の大きさを前記最大許容電流と等しくなるように制限するステップを含むことを特徴とするモータの駆動制御方法。
【請求項6】
請求項5記載のモータの駆動制御方法において、
前記第2のステップは、前記位置ずれ量が前記不感帯内に最初に入った後に、前記モータに流す電流が前記最大許容電流になる範囲まで前記位置ずれ量が外れた回数をカウントし、カウントした回数が所定数に達したときに、前記比例係数を所定の変更幅だけ大きくするステップを含むことを特徴とするモータの駆動制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータ駆動制御装置及びモータの駆動制御方法に関するものである。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
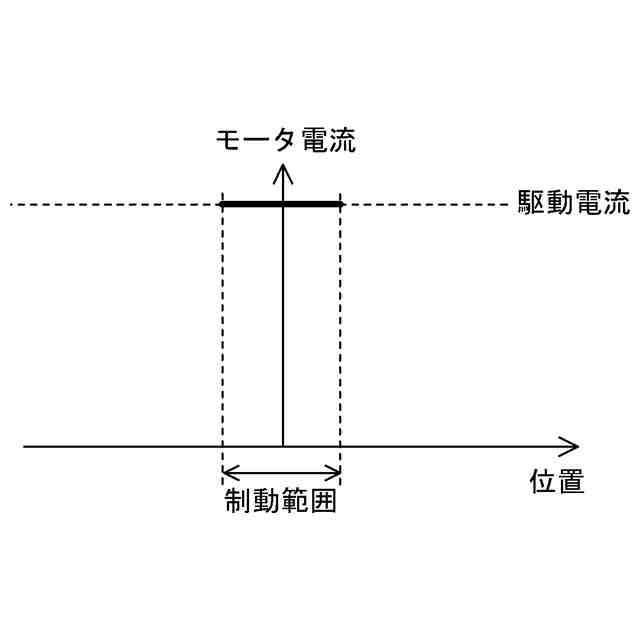
モータのロータを目標停止位置に停止させる技術についての研究、開発が行われている。三相ブラシレスのモータを制御する制御装置において、モータのロータを目標停止位置まで回転させる制御を行った後、モータのU相、V相、W相のうちのいずれか一相のみへ通電を行う一相通電により、ロータの回転位置が動かないように保持する技術が提案されている(特許文献1参照)。ここで、一相通電とは、通電ブレーキのことである。一相通電は、図7に示すように目標停止位置を中心とする制動範囲内においてモータのU相、V相、W相のうちのいずれか一相のみに駆動電流を流して制御力を発生させる。
【0003】
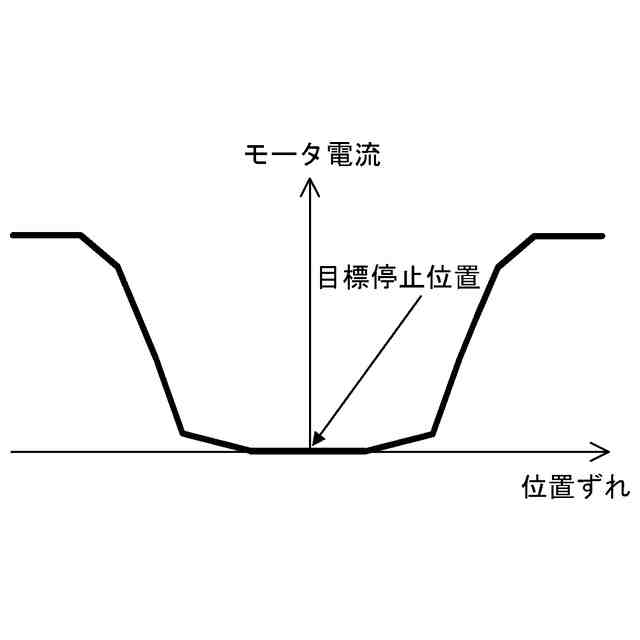
一方、特許文献2には、モータのロータを目標停止位置まで回転させる制御を行った後、目標停止位置からずれていない場合は電流を流さず、目標停止位置からずれた場合はずれをもたらした負荷に応じた電流を流してロータの位置を保持する制御装置が開示されている(図8)。図8の例では、目標停止位置を中心とする所定の範囲内ではモータに電流が流れない。
【0004】
特許文献1に開示された技術では、ロータの位置を保持できるものの、最も大きい外力を考慮した駆動電流を流すため、モータの発熱や消費電力が大きくなるという課題があった。
特許文献2に開示された技術では、ロータの位置ずれを検知してから電流を流すため、位置ずれを検知できるまでは制動力を発生させることができず、位置ずれ検知分解能以下のロータの移動を抑制することができないという課題があった。また、特許文献2に開示された技術では、位置ずれとトルクとを対応付けたテーブルに基づいてモータに電流を流すため、テーブル作成のために事前に各ポイントでデータ取得が必要になるという課題があった。さらに、特許文献2に開示された技術では、制動トルクゼロの状態から急に電流を流してトルクを発生させるため、設定によっては急激なトルク発生により衝撃が発生する可能性があった。
【先行技術文献】
【特許文献】
【0005】
特開2021-075376号公報
国際公開WO2023/276593
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、上記課題を解決するためになされたもので、モータの発熱や消費電力と装置の機械的な損傷とを抑えることができるモータ駆動制御装置及びモータの駆動制御方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明のモータ駆動制御装置は、モータに取り付けられた位置センサの出力に基づいて前記モータのロータの現在位置を算出するように構成された位置演算部と、前記ロータの目標停止位置と前記位置演算部によって算出された現在位置との位置ずれ量を算出し、算出した位置ずれ量に基づいて前記モータに流す電流の大きさを決定して、制御信号を出力するように構成された位置制御部と、前記制御信号に応じて前記モータに電流を供給するように構成されたインバータ回路とを備え、前記位置制御部は、前記位置ずれ量が不感帯内の場合には、前記モータに流す電流の大きさを前記モータの許容可能な最大許容電流よりも小さい所定値に決定し、前記位置ずれ量が前記不感帯から外れた場合には、前記モータに流す電流の大きさを前記位置ずれ量の大きさに応じた値に決定することにより、前記位置ずれ量を位置ずれ許容範囲内に留める制動トルクを発生させることを特徴とするものである。
【0008】
また、本発明のモータ駆動制御装置の1構成例において、前記位置制御部は、前記位置ずれ量が前記不感帯から外れた場合には、前記位置ずれ量と前記所定値と前記不感帯と比例係数とによって決まる1次式によって、前記モータに流す電流の大きさを算出し、算出した電流の大きさが前記最大許容電流以上となった時点で、前記モータに流す電流の大きさを前記最大許容電流と等しくなるように制限することを特徴とするものである。
また、本発明のモータ駆動制御装置の1構成例において、前記位置制御部は、前記位置ずれ量が前記不感帯内に最初に入った後に、前記モータに流す電流が前記最大許容電流になる範囲まで前記位置ずれ量が外れた回数をカウントし、カウントした回数が所定数に達したときに、前記比例係数を所定の変更幅だけ大きくすることを特徴とするものである。
【0009】
また、本発明のモータの駆動制御方法は、モータに取り付けられた位置センサの出力に基づいて前記モータのロータの現在位置を算出する第1のステップと、前記ロータの目標停止位置と前記第1のステップで算出した現在位置との位置ずれ量を算出し、算出した位置ずれ量に基づいて前記モータに流す電流の大きさを決定して、制御信号を出力する第2のステップとを含み、前記第2のステップは、前記位置ずれ量が不感帯内の場合には、前記モータに流す電流の大きさを前記モータの許容可能な最大許容電流よりも小さい所定値に決定し、前記位置ずれ量が前記不感帯から外れた場合には、前記モータに流す電流の大きさを前記位置ずれ量の大きさに応じた値に決定することにより、前記位置ずれ量を前記位置ずれ許容範囲内に留める制動トルクを発生させるステップを含むことを特徴とするものである。
【0010】
また、本発明のモータの駆動制御方法の1構成例において、前記第2のステップは、前記位置ずれ量が前記不感帯から外れた場合には、前記位置ずれ量と前記所定値と前記不感帯と比例係数とによって決まる1次式によって、前記モータに流す電流の大きさを算出し、算出した電流の大きさが前記最大許容電流以上となった時点で、前記モータに流す電流の大きさを前記最大許容電流と等しくなるように制限するステップを含むことを特徴とするものである。
また、本発明のモータの駆動制御方法の1構成例において、前記第2のステップは、前記位置ずれ量が前記不感帯内に最初に入った後に、前記モータに流す電流が前記最大許容電流になる範囲まで前記位置ずれ量が外れた回数をカウントし、カウントした回数が所定数に達したときに、前記比例係数を所定の変更幅だけ大きくするステップを含むことを特徴とするものである。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
アズビル株式会社
間欠動作制御回路
1か月前
アズビル株式会社
制御装置、および、制御方法
1日前
アズビル株式会社
情報処理装置および情報処理方法
8日前
アズビル株式会社
制御装置、制御方法及び制御システム
8日前
アズビル株式会社
モータ駆動制御装置及びモータの駆動制御方法
1日前
アズビル株式会社
情報処理装置、情報処理方法及び情報処理プログラム
1か月前
アズビル株式会社
直線変位検知システム、バルブポジショナ、バルブ開度計
10日前
アズビル株式会社
生産スケジューリング装置、生産スケジューリング方法および生産スケジューリングプログラム
29日前
個人
電気を重力で発電装置
1か月前
個人
高圧電気機器の開閉器
17日前
キヤノン電子株式会社
モータ
29日前
キヤノン電子株式会社
モータ
1か月前
株式会社アイドゥス企画
減反モータ
17日前
トヨタ自動車株式会社
モータ
29日前
株式会社デンソー
端子台
10日前
株式会社デンソー
回転電機
1日前
株式会社ダイヘン
送配電装置
1日前
富士電機株式会社
電力変換装置
1日前
株式会社不二越
空冷式油圧装置
1日前
富士電機株式会社
電力変換装置
1日前
本田技研工業株式会社
回転電機
3日前
ローム株式会社
半導体集積回路
8日前
株式会社日立製作所
回転電機
8日前
矢崎総業株式会社
電源回路
16日前
矢崎総業株式会社
給電装置
9日前
株式会社TMEIC
制御装置
9日前
ローム株式会社
モータドライバ回路
24日前
日産自動車株式会社
ロータシャフト
24日前
個人
非対称鏡像力を有する4層PWB電荷搬送体
24日前
大和ハウス工業株式会社
敷設用機器
9日前
株式会社イノコンバンク
無線給電システム
1日前
日産自動車株式会社
ロータシャフト
24日前
トヨタ自動車株式会社
ステータの製造装置
1か月前
株式会社アイシン
電力変換装置
29日前
サンデン株式会社
モータ
2日前
トヨタ自動車株式会社
可変界磁ロータ
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ