TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025178985
公報種別
公開特許公報(A)
公開日
2025-12-09
出願番号
2024085913
出願日
2024-05-27
発明の名称
ロボットシステム、ロボット制御方法及びロボット制御プログラム
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B25J
9/10 20060101AFI20251202BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットアームの柔軟な移動とリンクの位置及び姿勢の精度の向上とを両立させる。
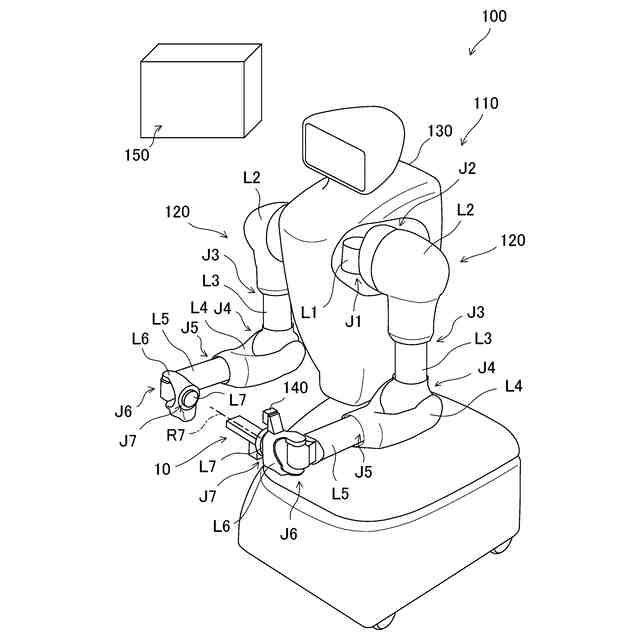
【解決手段】ロボットシステム100は、ロボット110と制御装置150とを備えている。ロボットアーム120は、複数のリンクL及び複数のリンクLを連結する複数の関節Jを有している。複数のリンクLは、ベース130から順番に並ぶ第1リンクL1から第nリンクLn(nは、2以上の整数)を含む。複数の関節Jは、ベース130から順番に並ぶ第1関節J1から第n関節Jnを含む。制御装置150は、第1関節J1から第n関節Jnの回転角を制御して第nリンクLnを目標位置及び目標姿勢に移動させる第1制御と、第1関節J1から第(n-i)関節Jn-iの回転角(iは、1以上の整数)を制御して第(n-i)リンクLn-iを目標位置及び目標姿勢に移動させる第2制御とを実行する。
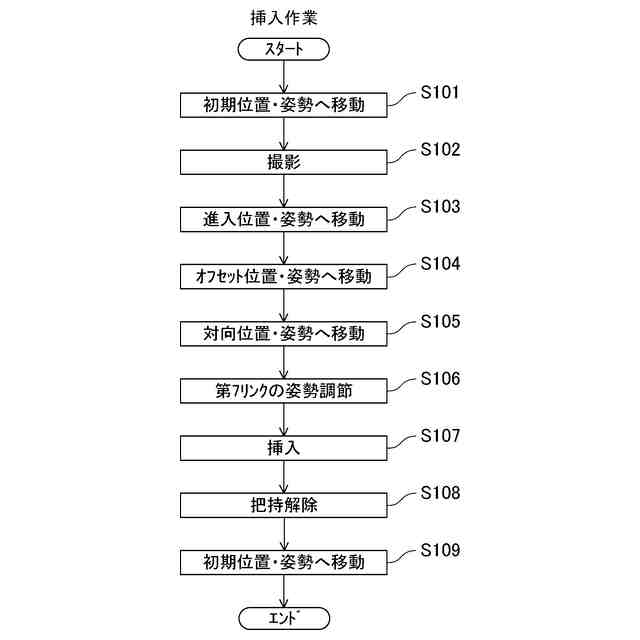
【選択図】図11
特許請求の範囲
【請求項1】
ベースと前記ベースに連結されたロボットアームとを有するロボットと、
前記ロボットを制御する制御装置とを備えたロボットシステムであって、
前記ロボットアームは、複数のリンク及び前記複数のリンクを連結する複数の関節を有し、
前記複数のリンクは、前記ベースから順番に並ぶ第1リンクから第nリンク(nは、2以上の整数)を含み、
前記複数の関節は、前記ベースから順番に並ぶ第1関節から第n関節を含み、
前記制御装置は、前記第1関節から前記第n関節の回転角を制御して前記第nリンクを目標位置及び目標姿勢に移動させる第1制御と、前記第1関節から第(n-i)関節の回転角(iは、1以上の整数)を制御して第(n-i)リンクを目標位置及び目標姿勢に移動させる第2制御とを実行するロボットシステム。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載のロボットシステムにおいて、
前記第(n-i)リンクに配置された撮像装置をさらに備えるロボットシステム。
【請求項3】
請求項2に記載のロボットシステムにおいて、
前記制御装置は、前記第2制御において、前記第(n-i)リンクが目標位置及び目標姿勢に移動するように前記撮像装置の撮影画像に基づいてフィードバック制御を実行するロボットシステム。
【請求項4】
請求項1に記載のロボットシステムにおいて、
前記制御装置は、前記目標位置及び目標姿勢に対応する前記複数の関節の回転角を逆運動学計算によって求めるロボットシステム。
【請求項5】
請求項1に記載のロボットシステムにおいて、
nは、前記第nリンクの位置及び姿勢の自由度よりも大きいロボットシステム。
【請求項6】
請求項1に記載のロボットシステムにおいて、
前記ロボットアームは、垂直多関節型のロボットアームであり、
nは、7以上の整数であり、
n-iは、6以下の整数であるロボットシステム。
【請求項7】
請求項1乃至6の何れか1つに記載のロボットシステムにおいて、
iは、1であるロボットシステム。
【請求項8】
ベースと、前記ベースから順番に並ぶ第1リンクから第nリンク(nは、2以上の整数)の複数のリンク及び前記複数のリンクを連結し且つ前記ベースから順番に並ぶ第1関節から第n関節の複数の関節を有し、前記ベースに連結されたロボットアームとを備えるロボットのロボット制御方法であって、
前記第1関節から前記第n関節の回転角を制御して前記第nリンクを目標位置及び目標姿勢に移動させる第1制御を実行することと、
前記第1関節から第(n-i)関節の回転角(iは、1以上の整数)を制御して第(n-i)リンクを目標位置及び目標姿勢に移動させる第2制御を実行することとを含むロボット制御方法。
【請求項9】
ベースと、前記ベースから順番に並ぶ第1リンクから第nリンク(nは、2以上の整数)の複数のリンク及び前記複数のリンクを連結し且つ前記ベースから順番に並ぶ第1関節から第n関節の複数の関節を有し、前記ベースに連結されたロボットアームとを備えるロボットを制御するためにコンピュータに、
前記第1関節から第n関節の回転角を制御して前記第nリンクを目標位置及び目標姿勢に移動させる第1制御と、
前記第1関節から第(n-i)関節の回転角(iは、1以上の整数)を制御して第(n-i)リンクを目標位置及び目標姿勢に移動させる第2制御とを実行させるロボット制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
ここに開示された技術は、ロボットシステム、制御方法及び制御プログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来より、複数のリンク及び複数の関節を有するロボットアームを備えたロボットが知られている。このようなロボットにおいては、各関節の回転角を制御することによってロボットアームが目標位置及び目標姿勢に移動させられる。
【先行技術文献】
【特許文献】
【0003】
特開2017-47478号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
前述のようなロボットアームにおいては、関節の個数が多くなるほどロボットアームを柔軟に移動させることができる。その反面、各リンクが柔軟に移動できるので、各リンクの位置及び姿勢の制御が難しくもなる。
【0005】
ここに開示された技術は、かかる点に鑑みてなされたものであり、その目的とするところは、ロボットアームの柔軟な移動とリンクの位置及び姿勢の精度の向上とを両立させることにある。
【課題を解決するための手段】
【0006】
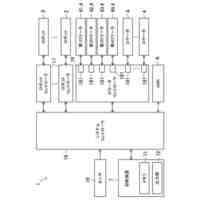
本開示のロボットシステムは、ベースと前記ベースに連結されたロボットアームとを有するロボットと、前記ロボットを制御する制御装置とを備えたロボットシステムであって、前記ロボットアームは、複数のリンク及び前記複数のリンクを連結する複数の関節を有し、前記複数のリンクは、前記ベースから順番に並ぶ第1リンクから第nリンク(nは、2以上の整数)を含み、前記複数の関節は、前記ベースから順番に並ぶ第1関節から第n関節を含み、前記制御装置は、前記第1関節から前記第n関節の回転角を制御して前記第nリンクを目標位置及び目標姿勢に移動させる第1制御と、前記第1関節から第(n-i)関節の回転角(iは、1以上の整数)を制御して第(n-i)リンクを目標位置及び目標姿勢に移動させる第2制御とを実行する。
【0007】
本開示のロボット制御方法は、ベースと、前記ベースから順番に並ぶ第1リンクから第nリンク(nは、2以上の整数)の複数のリンク及び前記複数のリンクを連結し且つ前記ベースから順番に並ぶ第1関節から第n関節の複数の関節を有し、前記ベースに連結されたロボットアームとを備えるロボットのロボット制御方法であって、前記第1関節から前記第n関節の回転角を制御して前記第nリンクを目標位置及び目標姿勢に移動させる第1制御を実行することと、前記第1関節から第(n-i)関節の回転角(iは、1以上の整数)を制御して第(n-i)リンクを目標位置及び目標姿勢に移動させる第2制御を実行することとを含む。
【0008】
本開示のロボット制御プログラムは、ベースと、前記ベースから順番に並ぶ第1リンクから第nリンク(nは、2以上の整数)の複数のリンク及び前記複数のリンクを連結し且つ前記ベースから順番に並ぶ第1関節から第n関節の複数の関節を有し、前記ベースに連結されたロボットアームとを備えるロボットを制御するためにコンピュータに、前記第1関節から第n関節の回転角を制御して前記第nリンクを目標位置及び目標姿勢に移動させる第1制御と、前記第1関節から第(n-i)関節の回転角(iは、1以上の整数)を制御して第(n-i)リンクを目標位置及び目標姿勢に移動させる第2制御とを実行させる。
【発明の効果】
【0009】
前記ロボットシステムによれば、ロボットアームの柔軟な移動とリンクの位置及び姿勢の精度の向上とを両立させることができる。
【0010】
前記ロボット制御方法によれば、ロボットアームの柔軟な移動とリンクの位置及び姿勢の精度の向上とを両立させることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
寝台
6日前
川崎重工業株式会社
圧縮機
4日前
川崎重工業株式会社
ハンド
2か月前
川崎重工業株式会社
圧縮機
4日前
川崎重工業株式会社
ロボット
2か月前
川崎重工業株式会社
ロボット
2か月前
川崎重工業株式会社
断熱配管
2か月前
川崎重工業株式会社
ダクト継手
2か月前
川崎重工業株式会社
水中構造体
1か月前
川崎重工業株式会社
監視システム
2か月前
川崎重工業株式会社
塗装システム
2か月前
川崎重工業株式会社
遠心ターボ機械
2か月前
川崎重工業株式会社
ゼオライト触媒
2か月前
川崎重工業株式会社
配管の支持構造
2か月前
川崎重工業株式会社
遠心式ターボ機械
1か月前
川崎重工業株式会社
ロボットシステム
2か月前
川崎重工業株式会社
ロボットシステム
2か月前
川崎重工業株式会社
液化空気保護装置
11日前
川崎重工業株式会社
ロボットシステム
4日前
川崎重工業株式会社
基板搬送システム
4日前
川崎重工業株式会社
多段遠心ターボ機械
1か月前
川崎重工業株式会社
バーナおよび燃焼器
1か月前
川崎重工業株式会社
寝台及び寝台セット
4日前
川崎重工業株式会社
ダイクッション装置
1か月前
川崎重工業株式会社
ワーク搬送ロボット
2か月前
川崎重工業株式会社
廃棄物処理システム
1か月前
川崎重工業株式会社
締結方法及び締結装置
2か月前
川崎重工業株式会社
極低温流体用配管設備
2か月前
川崎重工業株式会社
多段ラジアルタービン
1か月前
川崎重工業株式会社
ガスタービンエンジン
1か月前
川崎重工業株式会社
ロボットの診断システム
2か月前
川崎重工業株式会社
環状フレームの成形方法
2か月前
川崎重工業株式会社
航空機の電気機械システム
1か月前
川崎重工業株式会社
支援システムおよび支援方法
2か月前
株式会社キッツ
逆流防止弁
2か月前
川崎重工業株式会社
カーボンリサイクルシステム
5日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ