TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025177040
公報種別
公開特許公報(A)
公開日
2025-12-05
出願番号
2024083528
出願日
2024-05-22
発明の名称
基板搬送システム
出願人
川崎重工業株式会社
代理人
弁理士法人前田特許事務所
主分類
H01L
21/677 20060101AFI20251128BHJP(基本的電気素子)
要約
【課題】搬送される基板に関する情報を取得する基板搬送システムを提供する。
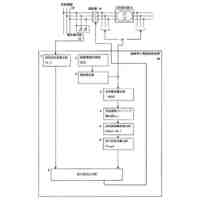
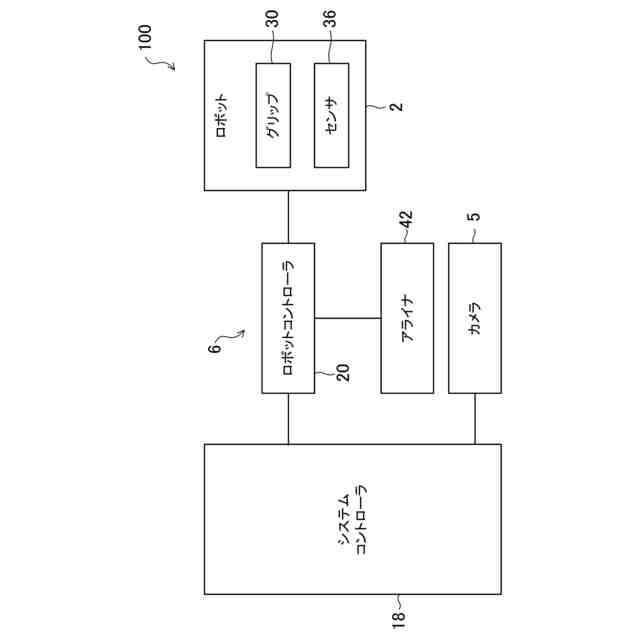
【解決手段】基板搬送システム1において、ロボットシステム6は、基板9を保持するハンド3及びアーム22を含むマニピュレータ200を有して基板を搬送する水平多関節型ロボット2と、基板を撮影するカメラ5と、カメラの撮影データを受けて、基板の色、温度又は表面の濡れを検出するシステムコントローラ及びロボットコントローラを有する。これにより、色を検知し基板の種類を検知し、温度を検知することで搬送の無駄な待機時間を削減し、濡れを検知することで搬送エラーを未然に防止する。
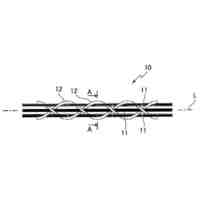
【選択図】図1
特許請求の範囲
【請求項1】
基板を保持するハンドを有しかつ前記基板を搬送する水平多関節型ロボットと、
前記基板を撮影するカメラと、
前記カメラの撮影データを受けて、前記基板の色を検出するコントローラと、
を備える、基板搬送システム。
続きを表示(約 1,200 文字)
【請求項2】
請求項1に記載の基板搬送システムにおいて、
前記水平多関節型ロボットは、前記ハンドに保持されている前記基板に照射された光の反射光を受ける光学式の基板検出センサを有し、
前記コントローラは、前記撮影データに基づいて検出した前記基板の色に基づいて、前記基板検出センサの受光量に係るしきい値を設定する、基板搬送システム。
【請求項3】
基板を保持するハンドを有しかつ前記基板を搬送する水平多関節型ロボットと、
前記基板を撮影するカメラと、
前記カメラの撮影データを受けて、前記基板の温度を検出するコントローラと、
を備える、基板搬送システム。
【請求項4】
請求項3に記載の基板搬送システムにおいて、
前記コントローラは、前記基板の温度が所定以上の場合に、異常と判断する、基板搬送システム。
【請求項5】
請求項3に記載の基板搬送システムにおいて、
前記カメラは、サーモグラフィーカメラであり、
前記コントローラは、前記カメラの撮影データを受けて、前記基板の表面の温度分布を検出する、基板搬送システム。
【請求項6】
請求項5に記載の基板搬送システムにおいて、
前記ハンドは、前記基板の外周縁に係合するエッジガイドを有するエッジグリップハンドであり、
前記コントローラは、検出した前記基板の表面の温度分布に基づいて、前記基板において前記エッジガイドが係合する箇所の温度が許容温度以下の場合に、前記水平多関節型ロボットに前記基板の保持を許可し、許容温度を超える場合に、前記水平多関節型ロボットに前記基板の保持を禁止する、基板搬送システム。
【請求項7】
基板を保持するハンドを有しかつ前記基板を搬送する水平多関節型ロボットと、
前記基板を撮影するカメラと、
前記カメラの撮影データを受けて、前記基板の表面の濡れを検出するコントローラと、
を備える、基板搬送システム。
【請求項8】
請求項7に記載の基板搬送システムにおいて、
前記コントローラは、前記基板の表面が濡れている場合に、異常と判断する、基板搬送システム。
【請求項9】
請求項7に記載の基板搬送システムにおいて、
前記ハンドは、前記基板の外周縁に係合するエッジガイドと、前記基板を挟んで前記エッジガイドとは逆側において前記基板に対し近接及び離間する第2ガイドとを有するエッジグリップハンドであり、
前記コントローラは、検出した前記基板の表面が濡れている場合に、前記第2ガイドの前記基板への接近動作を変更する、基板搬送システム。
【請求項10】
請求項1乃至9のいずれか1項に記載の基板搬送システムにおいて、
前記カメラは、前記ハンドに保持された前記基板を撮影する、基板搬送システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
ここに開示する技術は、基板搬送システムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
特許文献1には、従来の基板搬送システムが記載されている。基板搬送システムは、水平多関節型のロボットを備える。ロボットのハンドは、基板を保持する。ロボットは、ハンドが保持している基板を搬送する。
【0003】
基板搬送システムは、カメラを有する。カメラは、ハンドに固定される。カメラは、基板を保持していない状態において、ハンドを撮影する。コンピュータを含む診断装置は、カメラによって撮影された画像に基づいて、ハンドに変形が生じていることを判断する。
【先行技術文献】
【特許文献】
【0004】
特許第6718352号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
基板に関する情報は、ロボットを含む基板の搬送システムに利用できる。しかし、従来のシステムは、基板に関する情報を取得できない。
【課題を解決するための手段】
【0006】
ここに開示する技術は、基板搬送システムに係る。基板搬送システムは、
基板を保持するハンドを有しかつ前記基板を搬送する水平多関節型ロボットと、
前記基板を撮影するカメラと、
前記カメラの撮影データを受けて、前記基板の色を検出するコントローラと、
を備える。
【発明の効果】
【0007】
前記の基板搬送システムは、カメラが基板の画像を撮影するから、基板に関する情報を取得できる。
【図面の簡単な説明】
【0008】
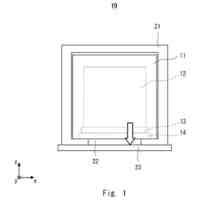
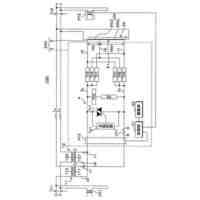
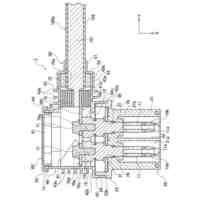
図1は、基板の搬送システムを示す。
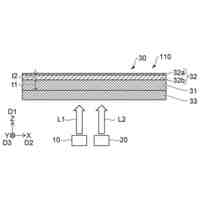
図2は、基板の搬送システムのブロック図である。
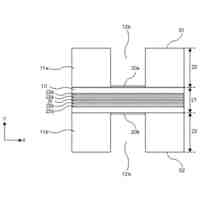
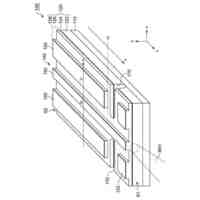
図3は、ロボットのハンドを示す。
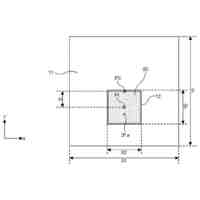
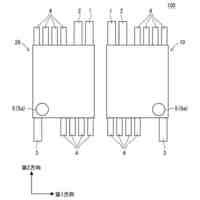
図4は、カメラによって撮影された基板の画像である。
図5は、カメラによって撮影された基板の画像である。
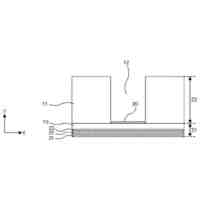
図6は、変形例に係る基板搬送システムを示す。
図7は、変形例に係る基板搬送システムのブロック図である。
【発明を実施するための形態】
【0009】
以下、基板搬送システムの実施形態について、図面を参照しながら説明する。ここで説明する基板搬送システムは例示である。
【0010】
(基板搬送システム)
図1は、基板搬送システム1の平面図である。図2は、基板搬送システム1のブロック図である。基板搬送システム1は、基板9を搬送する。基板9は、半導体ウェハ又はガラス基板である。基板搬送システム1は、例えばEFEM(Equipment Front End Module)である。基板搬送システム1は、例えばソータ(Sorter)である。基板搬送システム1は、例えばストッカ(Stocker)である。ロボットシステム6は、基板搬送システム1に組み込まれる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日機装株式会社
加圧装置
1日前
日新イオン機器株式会社
イオン源
1日前
株式会社トクミ
ケーブル
2日前
株式会社東芝
電子源
1日前
大電株式会社
電線又はケーブル
8日前
個人
電源ボックス及び電子機器
1日前
日本特殊陶業株式会社
アンテナ装置
3日前
日本航空電子工業株式会社
コネクタ
1日前
トヨタ自動車株式会社
蓄電装置構造
2日前
日本特殊陶業株式会社
アンテナ装置
3日前
三菱電機株式会社
半導体装置
1日前
日本特殊陶業株式会社
アンテナ装置
3日前
株式会社興電舎
励磁突入電流抑制方法
1日前
株式会社ダイヘン
電圧調整装置
3日前
TDK株式会社
電子部品
3日前
矢崎総業株式会社
コネクタ
2日前
矢崎総業株式会社
コネクタ
2日前
矢崎総業株式会社
接合装置
1日前
住友電気工業株式会社
半導体装置
2日前
新光電気工業株式会社
半導体装置
1日前
矢崎総業株式会社
ヒューズ接続端子
2日前
Astemo株式会社
電子制御装置
1日前
矢崎総業株式会社
コネクタ
1日前
矢崎総業株式会社
電線固定構造
1日前
日本バイリーン株式会社
電気化学素子用セパレータ
2日前
ウシオ電機株式会社
半導体レーザ素子
8日前
矢崎総業株式会社
端子防水構造
2日前
矢崎総業株式会社
端子防水構造
2日前
三菱電機株式会社
半導体装置の製造方法
8日前
矢崎総業株式会社
充電インレット
8日前
株式会社半導体エネルギー研究所
二次電池の作製方法
8日前
キヤノン電子管デバイス株式会社
電子管
2日前
キヤノン株式会社
発光装置
8日前
矢崎総業株式会社
コネクタ嵌合体
2日前
ソフトバンク株式会社
ベースプレート
1日前
富士電機株式会社
半導体装置
1日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ