TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025173348
公報種別
公開特許公報(A)
公開日
2025-11-27
出願番号
2024078898
出願日
2024-05-14
発明の名称
通信システム
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
G08G
1/09 20060101AFI20251119BHJP(信号)
要約
【課題】通信システムにおいて、サーバの受信する情報が過度に多くなってしまうことを抑制する。
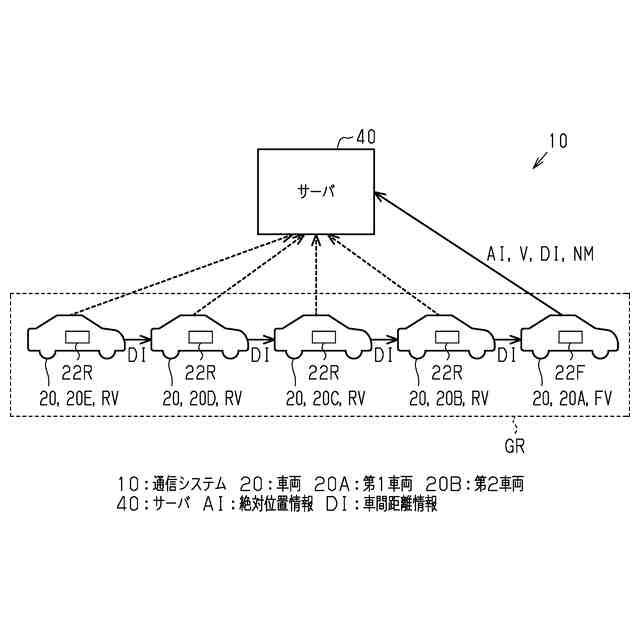
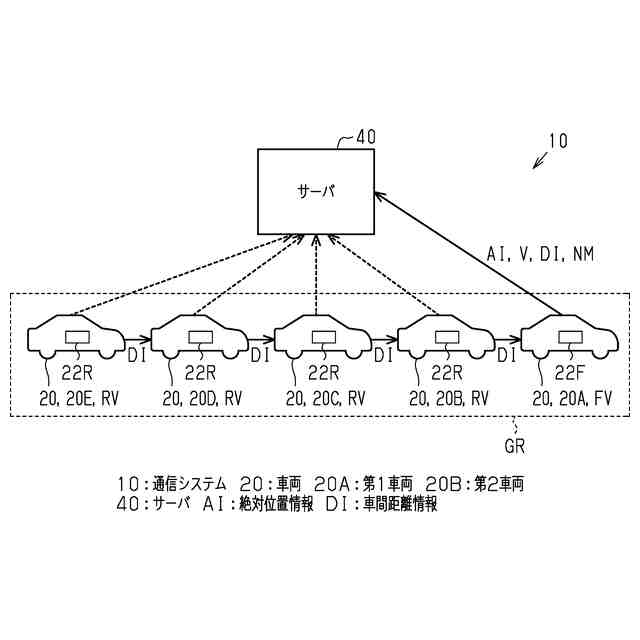
【解決手段】通信システム10は、第1車両20A及び第2車両20Bを含む複数の車両20と、複数の車両20と通信可能なサーバ40と、を備える。第2車両20Bが第1車両20Aと追従関係で走行しているとき、第1車両20Aは、第1車両20Aが位置する緯度及び経度の座標値を含む第1車両20Aの絶対位置情報AI及び第2車両20Bの車間距離情報DIを、サーバ40へ送信する。第2車両20Bは、第2車両20Bの絶対位置情報AIをサーバ40へ送信しない。サーバ40は、第1車両20Aの絶対位置情報AI及び第2車両20Bの車間距離情報DIに基づいて、第2車両20Bの絶対位置を算出する。
【選択図】図6
特許請求の範囲
【請求項1】
第1車両及び第2車両を含む複数の車両と、複数の前記車両と通信可能なサーバと、を備える通信システムであって、
前記第2車両が前記第1車両と追従関係で走行しているとき、
前記第1車両は、
前記第1車両が位置する緯度及び経度の座標値を含む前記第1車両の絶対位置情報を取得し、
前記第1車両と前記第2車両との間の距離である車間距離を示す前記第2車両の車間距離情報を取得し、
前記第1車両の絶対位置情報及び前記第2車両の車間距離情報を前記サーバへ送信し、
前記第2車両は、前記第2車両が位置する緯度及び経度の座標値を含む前記第2車両の絶対位置情報を前記サーバへ送信せず、
前記サーバは、前記第1車両の絶対位置情報及び前記第2車両の車間距離情報に基づいて、前記第2車両が位置する緯度及び経度の座標値を算出する
通信システム。
続きを表示(約 690 文字)
【請求項2】
前記第2車両が前記第1車両と前記追従関係で走行しているとき、
前記第1車両は、前記第1車両の車速を示す情報を前記サーバへ送信し、
前記第2車両は、前記第2車両の車速を示す情報を前記サーバへ送信せず、
前記サーバは、前記第2車両の車速を前記第1車両の車速を示す情報が示す車速と推定する
請求項1に記載の通信システム。
【請求項3】
前記サーバは、
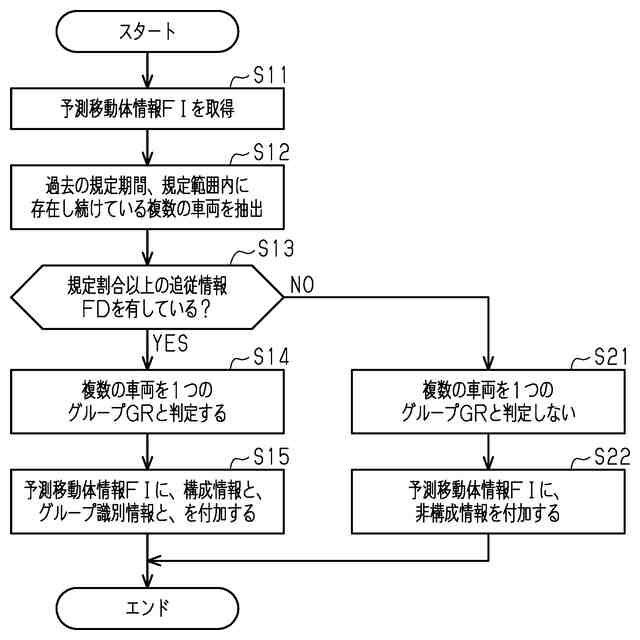
前記第1車両が位置する緯度及び経度の座標値及び前記第2車両が位置する緯度及び経度の座標値に基づいて、予測移動体情報を生成し、
前記予測移動体情報に基づいて、前記第2車両が第1車両と前記追従関係で走行しているか否かを判定し、
前記第2車両が前記第1車両と前記追従関係で走行しているとき、前記第2車両へ、前記第2車両の絶対位置情報の送信を停止する要求を送信する
請求項1に記載の通信システム。
【請求項4】
前記第2車両が前記第1車両と前記追従関係で走行していないとき、
前記第2車両は、前記第2車両の絶対位置情報を前記サーバへ送信する
請求項1に記載の通信システム。
【請求項5】
前記第2車両を含む規定数以上の前記車両が前記第1車両を先頭とした後続車両として前記第1車両を追従して走行しているとき、
前記サーバは、
前記後続車両へ、前記後続車両が位置する緯度及び経度の座標値を含む前記後続車両の絶対位置情報を送信する要求を送信する
請求項1に記載の通信システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、通信システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1には、第1車両と、第2車両と、サーバと、を備える通信システムが記載されている。通信システムにおいて、第1車両は、第1車両の位置情報と、第2車両の位置情報と、をサーバへ送信する。位置情報は、緯度及び経度の情報を含んでいる。
【先行技術文献】
【特許文献】
【0003】
特開2016-212610号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載されているような通信システムにおいて、サーバは、第1車両の緯度及び経度の情報と、第2車両の緯度及び経度の情報と、を受信する。そのため、サーバが受信する情報が過度に多くなってしまうおそれがある。
【課題を解決するための手段】
【0005】
上記課題を解決するため、本発明は、第1車両及び第2車両を含む複数の車両と、複数の前記車両と通信可能なサーバと、を備える通信システムであって、前記第2車両が前記第1車両と追従関係で走行しているとき、前記第1車両は、前記第1車両が位置する緯度及び経度の座標値を含む前記第1車両の絶対位置情報を取得し、前記第1車両と前記第2車両との間の距離である車間距離を示す前記第2車両の車間距離情報を取得し、前記第1車両の絶対位置情報及び前記第2車両の車間距離情報を前記サーバへ送信し、前記第2車両は、前記第2車両が位置する緯度及び経度の座標値を含む前記第2車両の絶対位置情報を前記サーバへ送信せず、前記サーバは、前記第1車両の絶対位置情報及び前記第2車両の車間距離情報に基づいて、前記第2車両が位置する緯度及び経度の座標値を算出する通信システムである。
【発明の効果】
【0006】
上記通信システムは、サーバの受信する情報が過度に多くなってしまうことを抑制できる。
【図面の簡単な説明】
【0007】
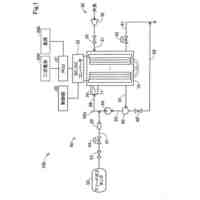
図1は、通信システムの概略図である。
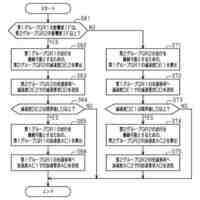
図2は、サーバがグループの判定を行う処理を示すフローチャートである。
図3は、サーバが各車両への要求を行う処理を示すフローチャートである。
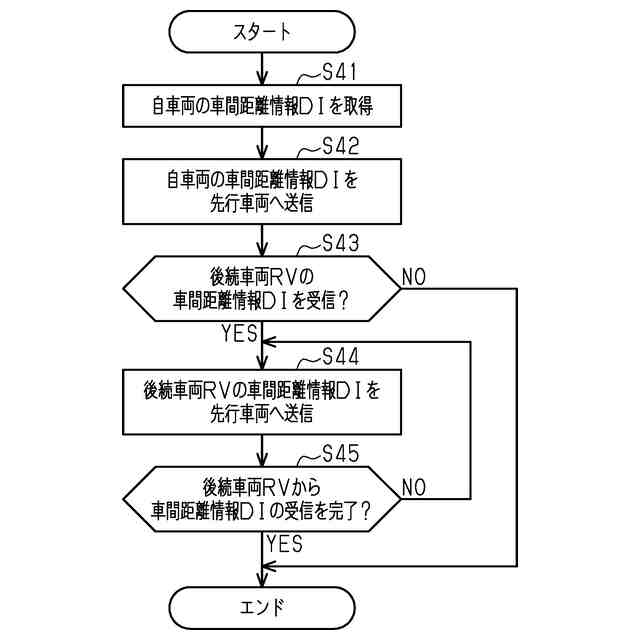
図4は、後続車両が行う送信制御の処理を示すフローチャートである。
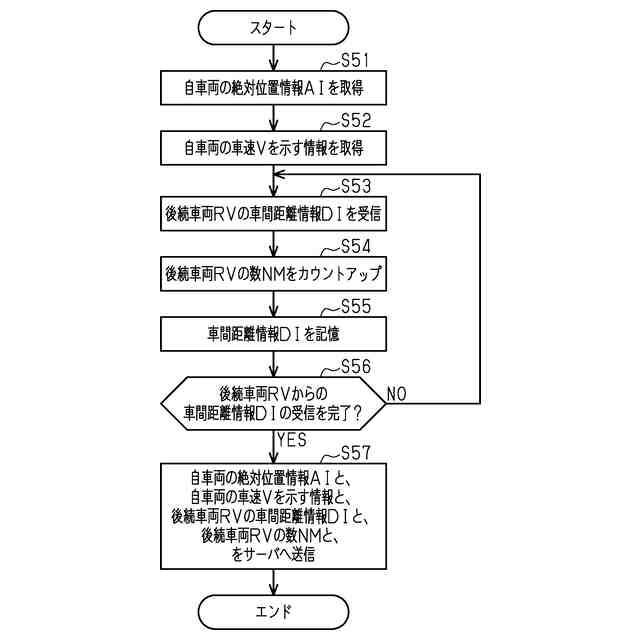
図5は、先頭車両が行う送信制御の処理を示すフローチャートである。
図6は、先頭車両からサーバへ情報が送信されている状況の説明図である。
【発明を実施するための形態】
【0008】
以下、通信システムの一実施形態について図面を参照して説明する。
<通信システムの概略>
図1に示すように、通信システム10は、複数の車両20と、無線通信回線網30と、サーバ40と、を備えている。
【0009】
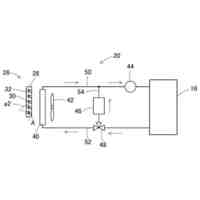
車両20は、車両通信装置21と、車両制御装置22と、複数の情報取得装置23と、を有している。車両通信装置21は、サーバ40と無線通信回線網30を介して無線通信によって通信する。また、車両通信装置21は、他の車両20と車車間通信によって通信する。車両制御装置22は、車両通信装置21の通信を制御する。
【0010】
複数の情報取得装置23は、車両20の各種情報を取得する。複数の情報取得装置23は、GPS受信装置24と、車速センサ25と、車間距離センサ26と、である。GPS受信装置24は、車両20の絶対位置を示す絶対位置情報AIをGPS装置から受信する。絶対位置は、緯度及び経度の座標値で示される位置である。そのため、絶対位置情報AIは、緯度及び経度の情報を含んでいる。車速センサ25は、車両20の走行速度を車速Vとして取得する。車間距離センサ26は、車両20から当該車両20に先行して走行する車両20までの距離である車間距離DVを検出する。車間距離センサ26の一例は、LIDARである。なお、「LIDAR」は、Laser Imaging Detection and Rangingの略称である。各情報取得装置23は、取得した車両20の情報を、車両制御装置22へ出力する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車体
21日前
トヨタ自動車株式会社
治具
29日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
22日前
トヨタ自動車株式会社
電池
22日前
トヨタ自動車株式会社
車両
7日前
トヨタ自動車株式会社
電池
1か月前
トヨタ自動車株式会社
電池
7日前
トヨタ自動車株式会社
車両
21日前
トヨタ自動車株式会社
方法
21日前
トヨタ自動車株式会社
配管
8日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
21日前
トヨタ自動車株式会社
車両
28日前
トヨタ自動車株式会社
車両
28日前
トヨタ自動車株式会社
電池
13日前
トヨタ自動車株式会社
方法
1か月前
トヨタ自動車株式会社
サーバ
1か月前
トヨタ自動車株式会社
電動車
7日前
トヨタ自動車株式会社
ロータ
8日前
トヨタ自動車株式会社
モータ
20日前
トヨタ自動車株式会社
モータ
1か月前
トヨタ自動車株式会社
蓄電池
21日前
トヨタ自動車株式会社
電動車
8日前
トヨタ自動車株式会社
制御装置
8日前
トヨタ自動車株式会社
電動車両
21日前
トヨタ自動車株式会社
エンジン
7日前
トヨタ自動車株式会社
蓄電装置
28日前
トヨタ自動車株式会社
蓄電装置
28日前
トヨタ自動車株式会社
路側装置
20日前
トヨタ自動車株式会社
樹脂外板
21日前
トヨタ自動車株式会社
制御装置
8日前
トヨタ自動車株式会社
路側装置
20日前
トヨタ自動車株式会社
蓄電装置
28日前
トヨタ自動車株式会社
路側装置
20日前
トヨタ自動車株式会社
鋳造装置
20日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ