TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025169824
公報種別
公開特許公報(A)
公開日
2025-11-14
出願番号
2024074993
出願日
2024-05-02
発明の名称
移動体制御システム
出願人
CMN株式会社
,
個人
,
個人
代理人
個人
,
個人
,
個人
主分類
G01C
21/28 20060101AFI20251107BHJP(測定;試験)
要約
【課題】移動体の位置推定を安定して実行できる移動体制御システムを提供する。
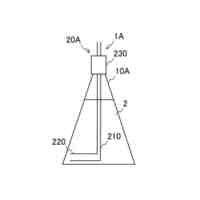
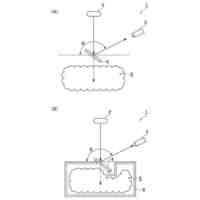
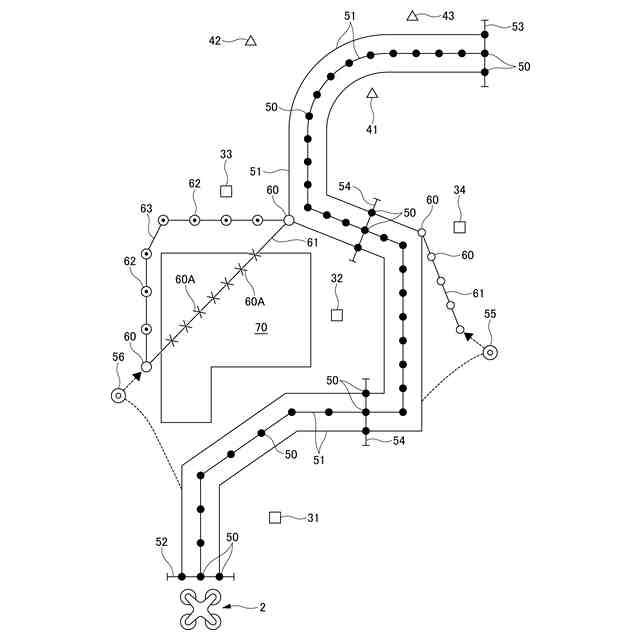
【解決手段】ドローン2の処理装置が移動経路区域位置座標情報を参照し、ドローン2は、移動経路区域位置座標情報に対応する移動経路区域51を移動する。ドローン2が出発して間もない時には、第1の固定基地局31からのLPWA電波に基づいて、ドローン2と第1の固定基地局31との間の距離が算出され、第1の固定基地局31からの赤外線レーザー光線に基づいて、ドローン2から第1の固定基地局31への方向が特定される。距離と方向と第1の固定基地局31の位置座標情報とに基づいて、ドローン2の現在位置座標情報が推定される。現在位置座標情報と移動経路区域位置座標情報とが対比され、両者が一致していないと判定された場合は、第1の現在地55から、目的地53へ近づきながら移動経路区域51へ近づくようドローン2を移動させる制御が行なわれる。
【選択図】図2
特許請求の範囲
【請求項1】
無線電波及び指向性光線を出力可能な出力体が配置された位置座標に関する情報である出力体位置座標情報と、複数の経由点の位置座標情報であり移動体が移動するために参照する情報である移動経路区域位置座標情報を記録可能な記録部と、
前記出力体が出力した前記無線電波に基づいて、同無線電波を受けた移動体と同無線電波を出力した同出力体との間の距離を算出可能な距離算出部と、
前記出力体が出力した前記指向性光線に基づいて、同指向性光線を受けた移動体から同指向性光線を出力した同出力体への方向を特定可能な方向特定部と、
前記距離算出部が算出した距離に関する情報である距離情報と、前記方向特定部が特定した方向に関する情報である方向情報と、前記記録部が記録した、同距離情報と同方向情報の対象となった出力体の出力体位置座標情報とに基づいて、移動体の現在位置座標情報を推定可能な移動体位置推定部と、
該移動体位置推定部が推定した移動体の現在位置座標情報と、前記記録部が記録した前記移動経路区域位置座標情報とを対比して、同現在位置座標情報が同移動経路区域位置座標情報と一致するか否かを判定可能な判定部と、
該判定部が、移動体の前記現在位置座標情報は前記移動経路区域位置座標情報と一致していないと判定した場合に、移動体の現在位置座標情報が移動経路区域位置座標情報と一致するよう移動体を移動させる制御が可能な移動制御部と、を備える
移動体制御システム。
続きを表示(約 1,800 文字)
【請求項2】
前記無線電波はLPWA電波であり、
前記指向性光線は赤外線レーザー光線である
請求項1に記載の移動体制御システム。
【請求項3】
前記移動体位置推定部は、前記距離情報である、移動体と出力体との間の距離に関する距離正規分布と、前記方向情報である、移動体から出力体への方向に関する方向正規分布とを掛け合わせて得られた、距離方向正規分布の平均値、及び同出力体の出力体位置座標情報に基づいて、移動体の現在位置座標情報を推定可能である
請求項1に記載の移動体制御システム。
【請求項4】
前記移動制御部は、移動体の現在位置座標情報に対応する現在地から、前記移動経路区域位置座標情報に含まれる目的地位置座標情報に対応する目的地へ近づきながら同移動経路区域位置座標情報に対応する移動経路区域へ近づくよう、同移動体を移動させる制御が可能である
請求項1に記載の移動体制御システム。
【請求項5】
前記記録部は、進入禁止区域の位置座標情報である進入禁止区域位置座標情報を記録可能であり、
前記判定部は、移動体の現在位置座標情報が前記移動経路区域位置座標情報と一致していないと判定した場合に、移動体の現在位置座標情報に対応する現在地から、同移動経路区域位置座標情報に含まれる目的地位置座標情報に対応する目的地へ近づきながら同移動経路区域位置座標情報に対応する移動経路区域へ近づくよう同移動体が移動するために参照する情報であり、複数の復帰経由点の位置座標情報である復帰経路区域位置座標情報を生成可能であり、
前記判定部は、前記復帰経路区域位置座標情報と、前記記録部が記録した進入禁止区域位置座標情報とを対比して、同進入禁止区域位置座標情報と同じ位置座標情報の前記復帰経由点がある場合、同進入禁止区域位置座標情報と同じ位置座標情報の同復帰経由点を、同進入禁止区域位置座標情報と相違する位置座標情報の修正復帰経由点へ変更して、前記復帰経路区域位置座標情報を修正復帰経路区域位置座標情報へ変更可能であり、
前記移動制御部は、移動体の現在位置座標情報が前記復帰経路区域位置座標情報または前記修正復帰経路区域位置座標情報と一致するよう同移動体を移動させる制御が可能である
請求項1に記載の移動体制御システム。
【請求項6】
移動体の移動速度に関する情報である移動速度情報と、移動体の移動方向に関する情報である移動方向情報を検知可能な移動情報検知部を備え、
前記移動体位置推定部は、
前記移動速度情報である、一の経由点から該一の経由点の次の経由点である他の経由点まで移動するときの移動体の移動速度に関する移動速度正規分布と、前記移動方向情報である、一の同経由点から他の同経由点への同移動体の移動方向に関する移動方向正規分布とを掛け合わせて得られた、移動速度方向正規分布の平均値と、
前記距離情報である、同移動体と出力体との間の距離に関する距離正規分布と、前記方向情報である、同移動体から同出力体への方向に関する方向正規分布とを掛け合わせて得られた距離方向正規分布の平均値と、
前記記録部が記録した同出力体の出力体位置座標情報と、に基づいて同移動体の現在位置座標情報を推定可能である
請求項1に記載の移動体制御システム。
【請求項7】
前記移動体位置推定部は、
移動体と一の出力体との間の距離に関する第1の距離正規分布と、同移動体と他の出力体との間の距離に関する第2の距離正規分布とを比較すると共に、同移動体から一の同出力体への方向に関する第1の方向正規分布と、同移動体から他の同出力体への方向に関する第2の方向正規分布とを比較して、距離正規分布と方向正規分布の両方の信用度が高い方の出力体と移動体との間の距離に関する高信用度距離正規分布と、移動体から、距離正規分布と方向正規分布の両方の信用度が高い方の出力体への方向に関する高信用度方向正規分布とを掛け合わせて得られた、高信用度距離方向正規分布の平均値と、
距離正規分布と方向正規分布の両方の信用度が高い方の出力体の出力体位置座標情報と、に基づいて、移動体の現在位置座標情報を推定可能である
請求項3に記載の移動体制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は移動体制御システムに関する。詳しくは、例えばドローンの自律飛行に関する移動体制御システムに係るものである。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
無人航空機(UAV)例えばドローンは、無人飛行、小型、軽量かつ低コストであることから、高所のインフラ点検、立ち入り困難な被災現場での状況把握、狭所での作業などに利用されている。
【0003】
具体的には、ドローンに荷物を運ばせたり、ドローンに農薬等を搭載して散布させたり、ドローンにカメラを搭載して高所や人では撮影できない場所の映像を入手させたりといった、「運搬」「散布」及び「撮影」に利用されている。
【0004】
ドローンは、遠隔操作だけでなく、GPSの衛星測位情報を利用して自己位置を推定し、あらかじめプログラミングされた飛行ルートに従い人の操縦なしで飛行する「自律飛行」も可能である。
そして、この自律性こそがドローンの有用性であり、様々な自律飛行のための技術が提案されている。
【0005】
例えば特許文献1には、「Visual SLAM」と呼ばれる連続して撮影された画像の複数のフレーム間で複数の特徴点を追跡することにより自己位置とマップの推定を並行して行う技術を利用した、無人航空機の推定位置を修正するシステムが記載されている。
【0006】
すなわち、特許文献1に記載されたシステムは、撮像装置により取得された画像から特徴点を抽出し、特徴点に基づいて自己位置推定しながら飛行する無人航空機であって、橋梁を横断する複数の横断経路の端部を、橋梁の側縁に沿って延びる連結経路を介して相互に連結して形成された飛行計画経路に基づいて、橋梁を橋梁の下方から撮像しながら飛行するときに、無人航空機の推定位置を修正するシステムである。
【先行技術文献】
【特許文献】
【0007】
特開2021-92465号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
「Visual SLAM」は、カメラ映像を基にしているため、HDR(High Dynamic Range)がかなり向上したとはいえ、照明のないところや、屋外夜中の利用は難しい。また、「Visual SLAM」は、正確には距離が測れない夜間や雨天などの悪天候には不向きである。
【0009】
そして、地震などの災害発生時に、ドローンなどの移動体によって物資などを被災地へ運ぶ場合、非常事態であるので夜間でもドローンを飛行させる必要があるが、Visual SLAMによる移動体位置推定を行いながらの自律飛行を前提とした特許文献1に記載の発明では、このような災害発生時に、ドローンの位置推定を安定して実行できず、ドローンを充分に自律飛行させることができないという懸念があった。
【0010】
また、ドローンが、設定された移動経路区域を移動することで、ドローンの管理を行い易い。
一方、悪天候下での強風などによって、設定された移動経路区域からドローンが逸脱してしまうことがあり、その場合には特に、再びドローンを移動経路区域に戻すために、移動経路区域から逸脱したドローンの位置推定が重要となる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
CMN株式会社
移動車両
5か月前
CMN株式会社
移動体制御システム
6日前
個人
採尿及び採便具
21日前
日本精機株式会社
検出装置
15日前
個人
高精度同時多点測定装置
1か月前
個人
計量機能付き容器
10日前
個人
アクセサリー型テスター
1か月前
株式会社カクマル
境界杭
今日
株式会社ミツトヨ
測定器
27日前
甲神電機株式会社
電流検出装置
15日前
アズビル株式会社
電磁流量計
1か月前
大成建設株式会社
風洞実験装置
10日前
トヨタ自動車株式会社
監視装置
1か月前
ダイキン工業株式会社
監視装置
1か月前
日本特殊陶業株式会社
ガスセンサ
8日前
個人
システム、装置及び実験方法
1か月前
ローム株式会社
半導体装置
1か月前
長崎県
形状計測方法
1か月前
個人
計量具及び計量機能付き容器
10日前
日本信号株式会社
距離画像センサ
13日前
ローム株式会社
半導体装置
1か月前
愛知時計電機株式会社
ガスメータ
27日前
TDK株式会社
磁気センサ
1か月前
愛知電機株式会社
軸部材の外観検査装置
24日前
大和製衡株式会社
組合せ計量装置
24日前
大和製衡株式会社
組合せ計量装置
24日前
双庸電子株式会社
誤配線検査装置
16日前
個人
非接触による電磁パルスの測定方法
13日前
キーコム株式会社
画像作成システム
今日
日本特殊陶業株式会社
センサ
1か月前
日本特殊陶業株式会社
センサ
1か月前
日本特殊陶業株式会社
センサ
1か月前
日本特殊陶業株式会社
センサ
1か月前
中国電力株式会社
電柱管理システム
1か月前
ダイハツ工業株式会社
移動支援装置
1か月前
日東精工株式会社
振動波形検査装置
16日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ