TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025161095
公報種別
公開特許公報(A)
公開日
2025-10-24
出願番号
2024064009
出願日
2024-04-11
発明の名称
ロボット装置、ロボットの制御方法、プログラム
出願人
国立大学法人 東京大学
代理人
個人
,
個人
,
個人
,
個人
主分類
G05D
1/242 20240101AFI20251017BHJP(制御;調整)
要約
【課題】水中に設けられる線状構造物を容易に追跡することが可能なロボット装置を提供する。
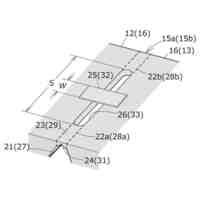
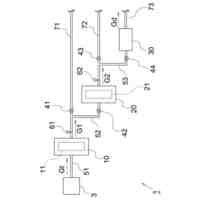
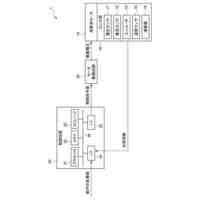
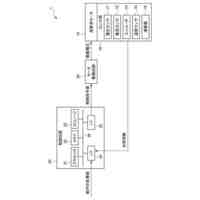
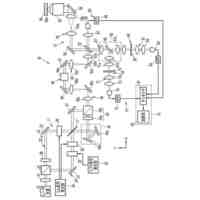
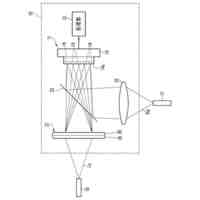
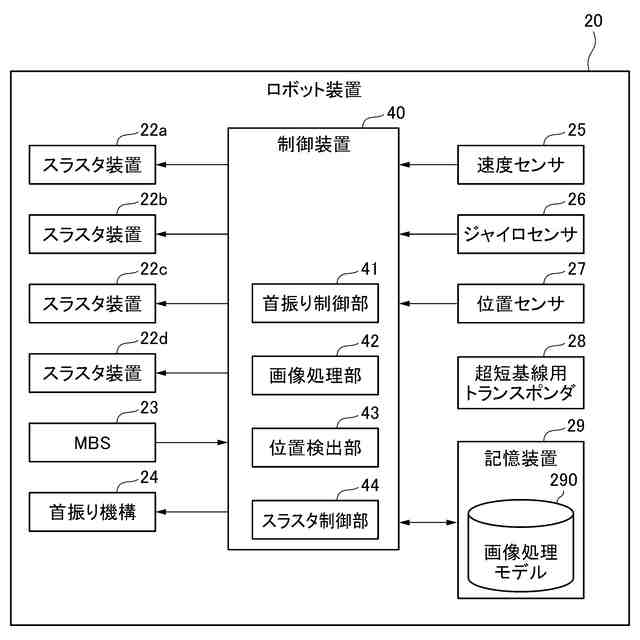
【解決手段】ロボット装置20は、MBS23と、画像処理部42と、位置検出部43と、スラスタ制御部44とを備えている。MBS23は水中の音響画像を生成する。画像処理部42は、音響画像内に含まれている係留索の像を抽出する。位置検出部43は、音響画像及び係留索の像に基づいて、ロボット本体21を基準とした係留索の相対的な位置を検出する。スラスタ制御部44は、位置検出部43により得られた係留索の検出位置に基づいてスラスタ装置22a,22bを制御する。
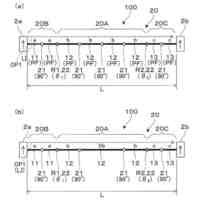
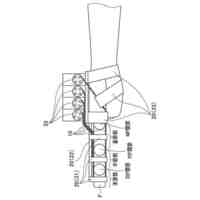
【選択図】図2
特許請求の範囲
【請求項1】
水中を潜航するロボット装置であって、
水中の構造物の配置情報を取得する情報取得部と、
前記水中の構造物の配置情報から線状構造物の配置情報を抽出する情報処理部と、
前記線状構造物の配置情報に基づいて、ロボット本体を基準とした前記線状構造物の相対的な位置を検出する位置検出部と、
前記位置検出部により得られた前記線状構造物の検出位置に基づいて、前記ロボット本体を水中で推進させる推進部を制御する制御部と、を備える
ロボット装置。
続きを表示(約 1,500 文字)
【請求項2】
前記情報取得部は、音波により水中を走査することにより、前記水中の構造物の配置情報を取得する
請求項1に記載のロボット装置。
【請求項3】
前記情報取得部は、音波により水中を走査することにより、前記水中の構造物の配置情報として、水中の音響画像を取得するものであり、
前記情報処理部は、前記音響画像に対して画像処理を施すことにより、前記音響画像から、前記線状構造物の配置情報として、前記音響画像に含まれている前記線状構造物の像を抽出し、
前記位置検出部は、前記音響画像及び前記線状構造物の像に基づいて、前記ロボット本体を基準とした前記線状構造物の相対的な位置を検出する
請求項1に記載のロボット装置。
【請求項4】
前記ロボット本体に対して前記情報取得部を首振り動作させる首振り機構を更に備える
請求項2又は3に記載のロボット装置。
【請求項5】
前記位置検出部は、
前記音響画像及び前記線状構造物の像から、前記情報取得部を基準とした前記線状構造物の相対的な位置を検出し、
前記情報取得部の首振り角度に基づいて、前記情報取得部を基準とした前記線状構造物の位置を、前記ロボット本体を基準とした前記線状構造物の相対的な位置に変換する
請求項4に記載のロボット装置。
【請求項6】
前記位置検出部は、前記水中の構造物の配置情報に基づいて、前記ロボット本体に対する前記線状構造物の位置を複数検出し、
前記制御部は、前記線状構造物の複数の検出位置に基づいて前記推進部を制御する
請求項2又は3に記載のロボット装置。
【請求項7】
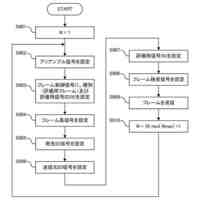
前記位置検出部は、前記線状構造物の複数の検出位置の中から、前記ロボット本体の前後方向における前記線状構造物の基準位置である第1基準位置と、前記ロボット本体の上下方向における前記線状構造物の基準位置である第2基準位置とを設定し、
前記制御部は、前記線状構造物の前記第1基準位置及び前記第2基準位置に基づいて前記推進部を制御する
請求項6に記載のロボット装置。
【請求項8】
前記制御部は、
前記線状構造物の前記第1基準位置及び前記第2基準位置に基づいて、前記ロボット本体の左右方向における前記線状構造物の基準位置である第3基準位置を更に設定し、
前記ロボット本体の前後方向における前記第1基準位置と第1目標位置との第1偏差、前記ロボット本体の左右方向における前記第2基準位置と第2目標位置との第2偏差、及び前記ロボット本体の上下方向における前記第3基準位置と第3目標位置との第3偏差に基づいて前記推進部を制御する
請求項7に記載のロボット装置。
【請求項9】
前記制御部は、
前記第1偏差、前記第2偏差、及び前記第3偏差に基づいて、前記ロボット本体の前後方向の目標速度である第1目標速度、及び前記ロボット本体の左右方向の目標速度である第2目標速度を設定し、
前記ロボット本体の前後方向の速度が前記第1目標速度となり、前記ロボット本体の左右方向の速度が前記第2目標速度となり、前記ロボット本体の上下方向の速度が一定の速度となるように前記推進部を制御する
請求項8に記載のロボット装置。
【請求項10】
前記第1目標速度及び前記第2目標速度には、上限速度及び下限速度の少なくとも一方が設けられている
請求項9に記載のロボット装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット装置、ロボットの制御方法、及びプログラムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来、下記の特許文献1に記載の水中点検装置がある。この水中点検装置は、移動手段及び撮影手段を有する点検装置本体と、この点検装置本体を遠隔操縦する操縦手段とを備えている。
【先行技術文献】
【特許文献】
【0003】
特開平6-94885号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
浮体式洋上風車等を固定するための係留索は、海水による腐食や生物付着等の影響を受けて劣化し易いため、定期的な検査が求められる。このような係留索を点検するために特許文献1に記載の水中点検装置を用いる場合、点検装置本体を操縦手段により遠隔操作する必要があるために、作業効率が悪い。このような事情から、係留索を自動的に追跡することが可能な装置が望まれている。
【0005】
なお、このような課題は、係留索に限らず、例えば水中に設けられるケーブル等の線状構造物に関しても同様に発生し得る。
【0006】
本発明は、こうした実情に鑑みてなされたものであり、その目的は、水中に設けられる線状構造物を容易に追跡することが可能なロボット装置、ロボットの制御方法、及びプログラムを提供することにある。
【課題を解決するための手段】
【0007】
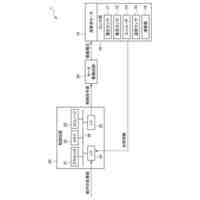
上記課題を解決するロボット装置は、水中を潜航するロボット装置であって、情報取得部と、情報処理部と、位置検出部と、制御部と、を備える。情報取得部は、水中の構造物の配置情報を取得する。情報処理部は、水中の構造物の配置情報から線状構造物の配置情報を抽出する。位置検出部は、線状構造物の配置情報に基づいて、ロボット本体を基準とした線状構造物の相対的な位置を検出する。制御部は、位置検出部により得られた線状構造物の検出位置に基づいて、ロボット本体を水中で推進させる推進部を制御する。
【0008】
上記課題を解決するロボットの制御方法は、水中を潜航するロボット装置の制御方法であって、水中の構造物の配置情報を取得させ、水中の構造物の配置情報から線状構造物の配置情報を抽出させ、線状構造物の配置情報に基づいて、ロボット本体を基準とした線状構造物の相対的な位置を検出させ、線状構造物の検出位置に基づいて、ロボット本体を水中で推進させる推進部を制御させる。
【0009】
上記課題を解決するプログラムは、ロボット装置を水中で潜航させるためのプログラムであって、コンピュータを、水中の構造物の配置情報を取得する情報取得部と、水中の構造物の配置情報から線状構造物の配置情報を抽出する情報処理部と、線状構造物の配置情報に基づいて、ロボット本体を基準とした線状構造物の相対的な位置を検出する位置検出部と、位置検出部により得られた線状構造物の検出位置に基づいて、ロボット本体を水中で推進させる推進部を制御する制御部と、として機能させる。
【0010】
この構成によれば、線状構造物の検出位置に沿うようにロボット本体を潜航させることができるため、水中に設けられる線状構造物を容易に追跡することが可能となる。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
国立大学法人 東京大学
力センサ
11日前
国立大学法人 東京大学
ガス処理方法
1か月前
国立大学法人 東京大学
担持金属触媒
2か月前
国立大学法人 東京大学
せん妄判定方法
3か月前
国立大学法人 東京大学
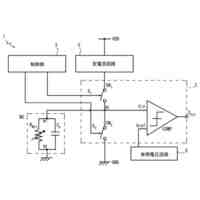
コンパレータ回路
1か月前
国立大学法人 東京大学
ビーム追従システム
1か月前
国立大学法人 東京大学
超音波モータシステム
2か月前
国立大学法人 東京大学
超音波モータシステム
2か月前
国立大学法人 東京大学
超音波モータシステム
2か月前
国立大学法人 東京大学
光学装置及びレーザー
4か月前
国立大学法人 東京大学
結晶、及びその製造方法
3か月前
AGC株式会社
組成物
5か月前
国立大学法人 東京大学
肝臓オルガノイド成熟培地
1か月前
国立大学法人 東京大学
テラヘルツ帯同期検波回路
2か月前
国立大学法人 東京大学
推定装置、及びプログラム
2か月前
NTT株式会社
圧力センサ
2か月前
国立大学法人 東京大学
読出回路及び磁気メモリ装置
2か月前
国立大学法人 東京大学
嗅覚受容体の応答感度増強剤
4か月前
国立大学法人 東京大学
接着性細胞の浮遊培養用基材
1か月前
国立大学法人 東京大学
テラヘルツ波帯位相変調回路
2か月前
国立大学法人 東京大学
蛍光測定装置及び蛍光測定方法
4日前
国立大学法人 東京大学
ドローンを用いた配送システム
1か月前
国立大学法人 東京大学
情報処理装置、及びプログラム
2か月前
国立大学法人 東京大学
酸化腐食抑制能を有する電解液
24日前
ダイキン工業株式会社
冷凍装置
24日前
ダイキン工業株式会社
冷凍装置
24日前
積水化学工業株式会社
酸素発生剤
2か月前
国立大学法人 東京大学
光デバイス及びコヒーレント受信器
2か月前
国立大学法人 東京大学
皮膚微生物叢を制御するための溶菌剤
4か月前
国立大学法人 東京大学
通信装置、制御方法、及びプログラム
1か月前
古河電気工業株式会社
超電導モータ
2か月前
国立大学法人 東京大学
ホウ素含有化合物及びそれを含む医薬
3か月前
国立大学法人 東京大学
静電容量式センサ及びロボットシステム
3か月前
京セラ株式会社
予測装置及び予測方法
19日前
国立大学法人 東京大学
手指アシスト装置および関節動作支援方法
2か月前
太平洋セメント株式会社
セメント組成物
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ