TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025125464
公報種別
公開特許公報(A)
公開日
2025-08-27
出願番号
2024021530
出願日
2024-02-15
発明の名称
超音波モータシステム
出願人
国立大学法人 東京大学
,
株式会社新生工業
代理人
弁理士法人平和国際特許事務所
主分類
H02N
2/14 20060101AFI20250820BHJP(電力の発電,変換,配電)
要約
【課題】超音波モータの動作を良好にする。
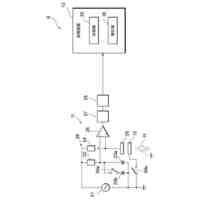
【解決手段】超音波モータシステム1は、超音波モータ10と、超音波モータ10の状態に関する状態情報を取得するセンサ群70と、超音波モータ10を動作させるように制御指令値に基づいて超音波モータにA相の交流電圧とB相の交流電圧とを印加するように構成されたモータ駆動回路60と、制御装置20とを備える。制御装置20は、超音波モータ10の目標とする状態に関する目標情報と前記状態情報とを取得し、交流電圧の駆動周波数と位相差とについて、取得した目標情報と状態情報とに基づいて、目標情報及び状態情報の入力に対して超音波モータを前記目標とする状態にするために最適な駆動周波数と位相差とに関する情報を出力するように構成された学習済みモデルを用いて、最適な駆動周波数と位相差とについて決定し、それに関する制御指令値を前記モータ駆動回路に出力する。
【選択図】図1
特許請求の範囲
【請求項1】
超音波モータと、
前記超音波モータの状態に関する状態情報を取得するセンサと、
前記超音波モータを動作させるように制御指令値に基づいて前記超音波モータにA相の交流電圧とB相の交流電圧とを印加するように構成されたモータ駆動回路と、
前記超音波モータの目標とする状態に関する目標情報と前記状態情報とを取得し、前記交流電圧の周波数である駆動周波数と、前記A相の交流電圧と前記B相の交流電圧との位相差とについて、取得した前記目標情報と前記状態情報とに基づいて、前記目標情報及び前記状態情報の入力に対して前記超音波モータを前記目標とする状態にするために最適な前記駆動周波数と前記位相差とに関する情報を出力するように構成された学習済みモデルを用いて、最適な前記駆動周波数と前記位相差とについて決定し、当該最適な駆動周波数と位相差とに関する前記制御指令値を前記モータ駆動回路に出力するように構成された制御装置と
を備える超音波モータシステム。
続きを表示(約 1,600 文字)
【請求項2】
前記制御装置は、前記超音波モータを前記目標とする状態にするために、前記状態情報として、前記超音波モータを流れる交流電流の振幅及び位相のうち少なくとも何れかを用いる、請求項1に記載の超音波モータシステム。
【請求項3】
前記目標とする状態は、前記超音波モータが出力するトルク、及び前記超音波モータの回転位置のうち少なくとも何れかを含む、請求項1又は2に記載の超音波モータシステム。
【請求項4】
前記学習済みモデルは、前記超音波モータを前記目標とする状態にするための出力として、最適な前記駆動周波数と前記位相差とに加えて、前記交流電圧の最適な振幅と位相とのうち少なくとも何れかに関する情報を出力し、
前記制御装置は、前記最適な駆動周波数と位相差とに加えて、前記交流電圧の最適な振幅と位相とのうち少なくとも何れかに関する前記制御指令値を前記モータ駆動回路に出力するように構成されている、
請求項1又は2に記載の超音波モータシステム。
【請求項5】
超音波モータを動作させるように当該超音波モータに印加するA相の交流電圧とB相の交流電圧とを制御して前記超音波モータの動作を制御する制御装置であって、
前記超音波モータの状態に関する状態情報と前記超音波モータの目標とする状態に関する目標情報とを取得し、
前記交流電圧の周波数である駆動周波数と、前記A相の交流電圧と前記B相の交流電圧との位相差とについて、取得した前記目標情報と前記状態情報とに基づいて、前記目標情報及び前記状態情報の入力に対して前記超音波モータを前記目標とする状態にするために最適な前記駆動周波数と前記位相差とに関する情報を出力するように構成された学習済みモデルを用いて、最適な前記駆動周波数と前記位相差とについて決定し、
前記最適な駆動周波数と位相差とに関する制御指令値を出力する
ように構成されている、制御装置。
【請求項6】
超音波モータを動作させるように当該超音波モータに印加するA相の交流電圧とB相の交流電圧とを制御して前記超音波モータの動作を制御する制御方法であって、
前記超音波モータの状態に関する状態情報と前記超音波モータの目標とする状態に関する目標情報とを取得することと、
前記交流電圧の周波数である駆動周波数と、前記A相の交流電圧と前記B相の交流電圧との位相差とについて、取得した前記目標情報と前記状態情報とに基づいて、前記目標情報及び前記状態情報の入力に対して前記超音波モータを前記目標とする状態にするために最適な前記駆動周波数と前記位相差とに関する情報を出力するように構成された学習済みモデルを用いて、最適な前記駆動周波数と前記位相差とについて決定することと、
前記最適な駆動周波数と位相差とに関する制御指令値を出力することと
を含む超音波モータの制御方法。
【請求項7】
コンピュータに超音波モータを動作させるように当該超音波モータに印加するA相の交流電圧とB相の交流電圧とを制御して前記超音波モータの動作を制御させるための制御プログラムであって、前記コンピュータに、
前記超音波モータの状態に関する状態情報と前記超音波モータの目標とする状態に関する目標情報とを取得することと、
前記交流電圧の周波数である駆動周波数と、前記A相の交流電圧と前記B相の交流電圧との位相差とについて、取得した前記目標情報と前記状態情報とに基づいて、前記目標情報及び前記状態情報の入力に対して前記超音波モータを前記目標とする状態にするために最適な前記駆動周波数と前記位相差とに関する情報を出力するように構成された学習済みモデルを用いて、最適な前記駆動周波数と前記位相差とについて決定することと、
前記最適な駆動周波数と位相差とに関する制御指令値を出力することと
を実行させるための制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、超音波モータシステムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
超音波モータは、小型で高トルクが得られ、高静粛であり、非通電時に大きな保持力が得られるなど、多くの利点を有する。一方で、モータ自体が非線形特性を有し、動作に多くのパラメータが関連することなどから、その制御は比較的難しい。このため、超音波モータの制御について、種々の検討がなされている。例えば、特許文献1には、深層強化学習により得られた学習済みモデルを用いて、超音波モータの制御のための制御信号を生成することなどが開示されている。また、例えば、特許文献2には、遺伝的アルゴリズムの実行によって決定したニューラルネットワークの出力を超音波モータの制御に活用することなどが開示されている。
【先行技術文献】
【特許文献】
【0003】
国際公開第2023/068370号
国際公開第2007/049412号
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は、超音波モータの動作を良好にすることを目的とする。
【課題を解決するための手段】
【0005】
本発明の一態様によれば、超音波モータシステムは、超音波モータと、前記超音波モータの状態に関する状態情報を取得するセンサと、前記超音波モータを動作させるように制御指令値に基づいて前記超音波モータにA相の交流電圧とB相の交流電圧とを印加するように構成されたモータ駆動回路と、前記超音波モータの目標とする状態に関する目標情報と前記状態情報とを取得し、前記交流電圧の周波数である駆動周波数と、前記A相の交流電圧と前記B相の交流電圧との位相差とについて、取得した前記目標情報と前記状態情報とに基づいて、前記目標情報及び前記状態情報の入力に対して前記超音波モータを前記目標とする状態にするために最適な前記駆動周波数と前記位相差とに関する情報を出力するように構成された学習済みモデルを用いて、最適な前記駆動周波数と前記位相差とについて決定し、当該最適な駆動周波数と位相差とに関する制御指令値を前記モータ駆動回路に出力するように構成された制御装置とを備える。
【発明の効果】
【0006】
本発明によれば、超音波モータの動作を良好にできる。
【図面の簡単な説明】
【0007】
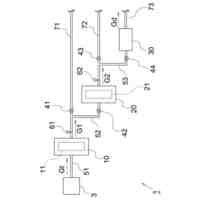
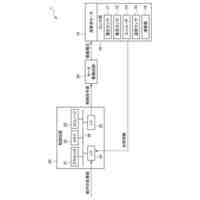
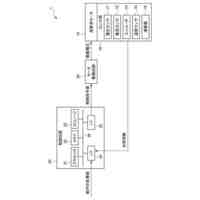
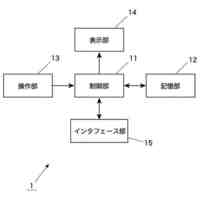
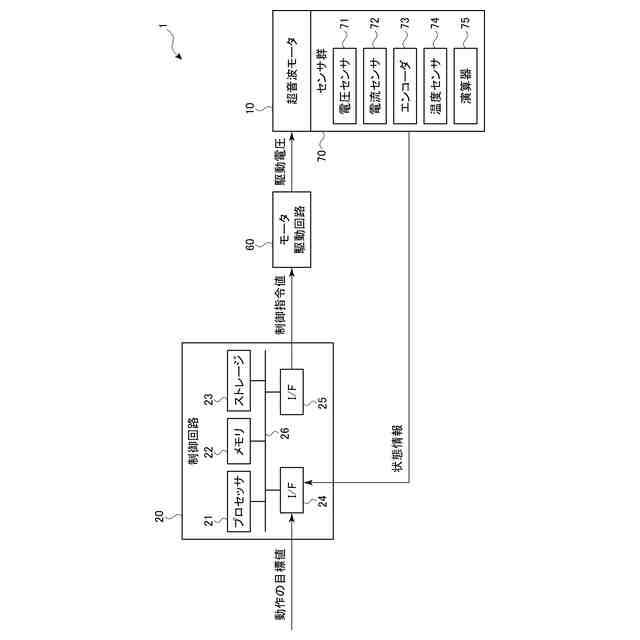
図1は、一実施形態に係る超音波モータシステムの構成例の概略を示すブロック図である。
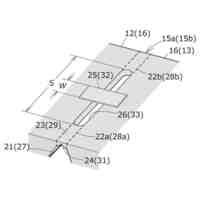
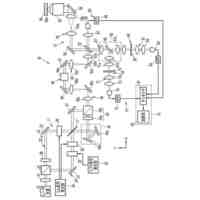
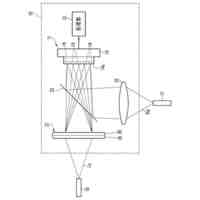
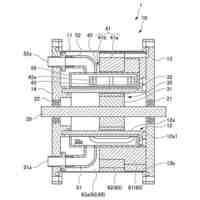
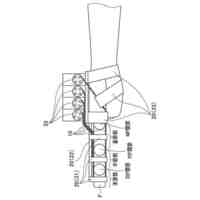
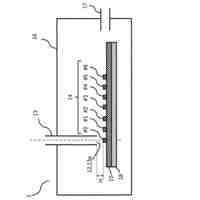
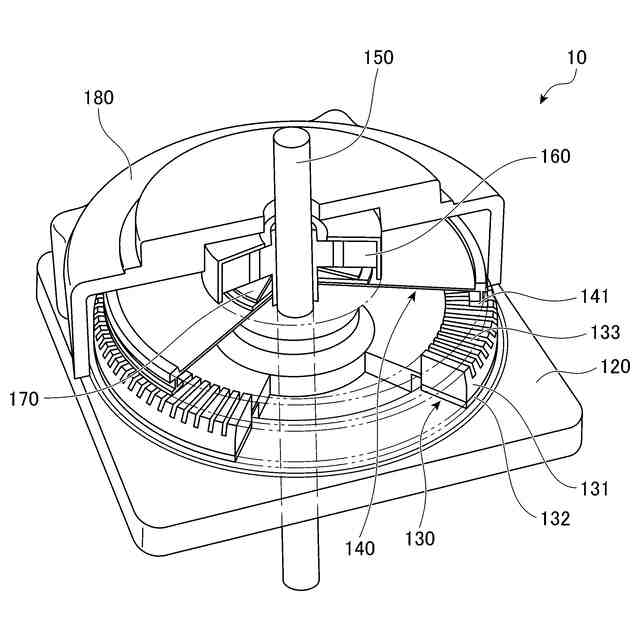
図2は、一実施形態に係る進行波型の超音波モータの構成例の概略を示す図である。
図3は、超音波モータのステータの振動振幅と駆動周波数との関係の一例を示す図である。
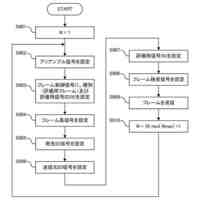
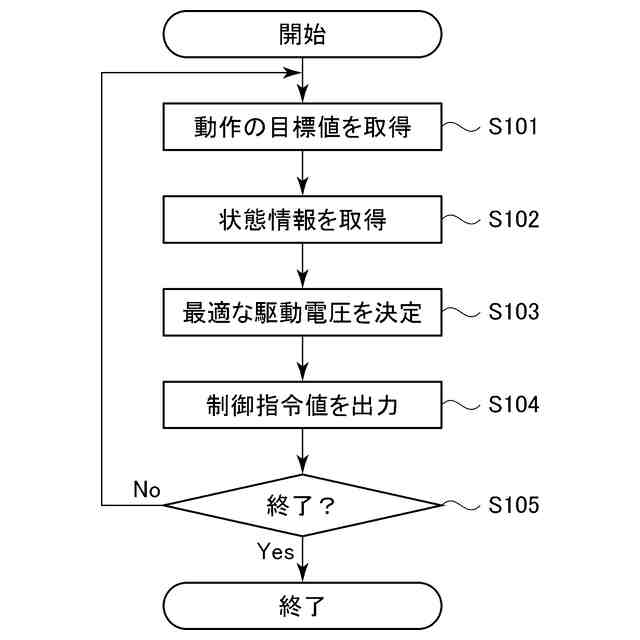
図4は、制御装置による超音波モータの制御に係る動作の一例の概略を示すフローチャートである。
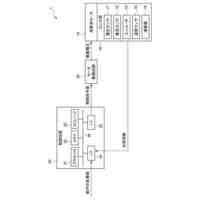
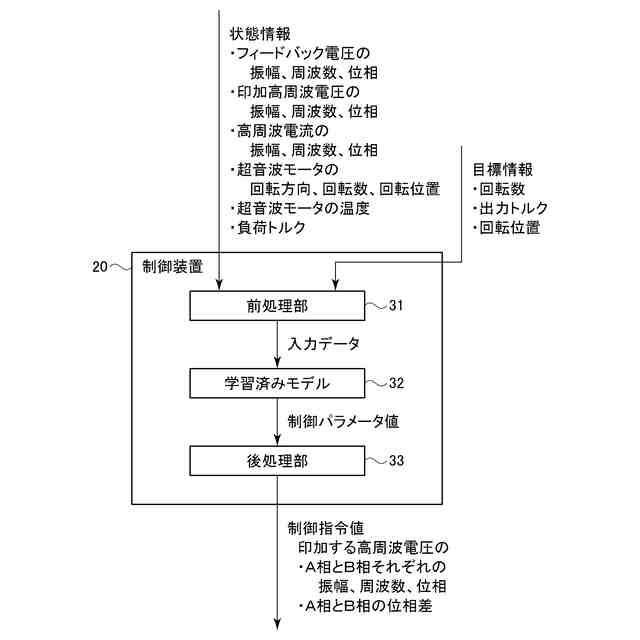
図5は、一実施形態に係る制御装置の構成例の概略を示す機能ブロック図である。
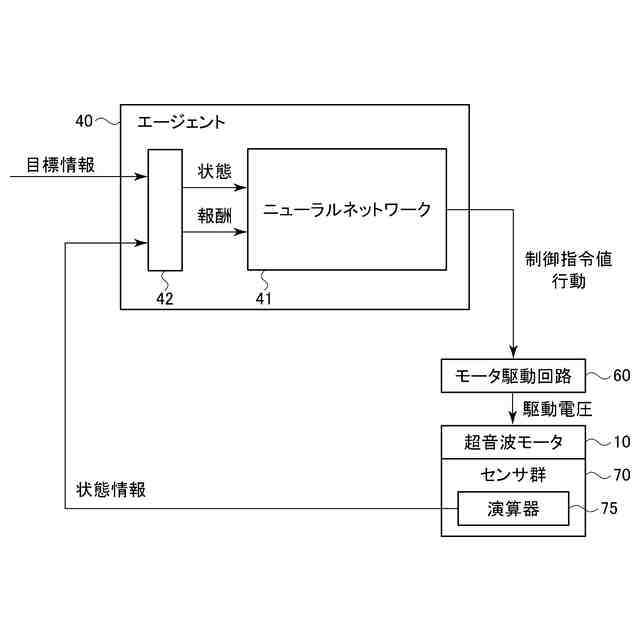
図6は、深層強化学習の一例について説明するための図である。
【発明を実施するための形態】
【0008】
一実施形態について図面を参照して説明する。本実施形態は、超音波モータシステムに関する。この超音波モータシステムは、超音波モータを含み、当該超音波モータの動作が適切に制御されるように構成されている。
【0009】
[システム構成]
図1は、本実施形態に係る超音波モータシステム1の構成例の概略を示すブロック図である。超音波モータシステム1は、超音波モータ10と、制御装置20と、モータ駆動回路60と、センサ群70とを備える。
【0010】
〈超音波モータの構成の概略〉
超音波モータ10は、超音波振動によって動作するどのような方式の超音波モータでもよいが、本実施形態では、振動型アクチュエータの一形態である回転型の進行波方式の超音波モータである。図2は、本実施形態に係る超音波モータ10の構成例の概略を示す図である。図2は、超音波モータ10の構造が見えるように、各部が切断された状態を示している。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
国立大学法人 東京大学
力センサ
11日前
国立大学法人 東京大学
ガス処理方法
1か月前
国立大学法人 東京大学
担持金属触媒
2か月前
国立大学法人 東京大学
コンパレータ回路
1か月前
国立大学法人 東京大学
ビーム追従システム
1か月前
国立大学法人 東京大学
超音波モータシステム
2か月前
国立大学法人 東京大学
超音波モータシステム
2か月前
国立大学法人 東京大学
超音波モータシステム
2か月前
国立大学法人 東京大学
肝臓オルガノイド成熟培地
1か月前
国立大学法人 東京大学
テラヘルツ帯同期検波回路
2か月前
国立大学法人 東京大学
推定装置、及びプログラム
2か月前
国立大学法人 東京大学
読出回路及び磁気メモリ装置
2か月前
NTT株式会社
圧力センサ
2か月前
国立大学法人 東京大学
接着性細胞の浮遊培養用基材
1か月前
国立大学法人 東京大学
テラヘルツ波帯位相変調回路
2か月前
国立大学法人 東京大学
蛍光測定装置及び蛍光測定方法
4日前
国立大学法人 東京大学
酸化腐食抑制能を有する電解液
24日前
国立大学法人 東京大学
ドローンを用いた配送システム
1か月前
国立大学法人 東京大学
情報処理装置、及びプログラム
2か月前
ダイキン工業株式会社
冷凍装置
24日前
ダイキン工業株式会社
冷凍装置
24日前
積水化学工業株式会社
酸素発生剤
2か月前
国立大学法人 東京大学
光デバイス及びコヒーレント受信器
2か月前
国立大学法人 東京大学
通信装置、制御方法、及びプログラム
1か月前
古河電気工業株式会社
超電導モータ
2か月前
京セラ株式会社
予測装置及び予測方法
19日前
国立大学法人 東京大学
静電容量式センサ及びロボットシステム
3か月前
太平洋セメント株式会社
セメント組成物
2か月前
国立大学法人 東京大学
手指アシスト装置および関節動作支援方法
2か月前
国立大学法人 東京大学
樹脂の製造方法、樹脂、薄膜及び複合薄膜
3日前
ダイキン工業株式会社
吸着器及び冷凍装置
24日前
国立大学法人 東京大学
学習プログラム、情報処理装置及び学習方法
1か月前
国立大学法人 東京大学
ガス成分検知装置及びガス成分計測システム
2か月前
国立大学法人 東京大学
標的タンパク質に付加されるためのタンパク質
16日前
国立大学法人 東京大学
情報処理システム、情報処理方法及びプログラム
2か月前
国立大学法人 東京大学
フラビウイルスに対するアプタマー及びその使用
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ