TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025122740
公報種別
公開特許公報(A)
公開日
2025-08-22
出願番号
2024018350
出願日
2024-02-09
発明の名称
静電容量式センサ及びロボットシステム
出願人
国立大学法人 東京大学
,
株式会社不二越
代理人
個人
,
個人
主分類
G01V
3/08 20060101AFI20250815BHJP(測定;試験)
要約
【課題】空気状態の変化に対して物体検知の補正が可能であると共に、補正に係る構成を簡易化することのできる静電容量式センサを提供する。
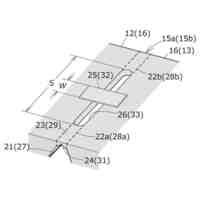
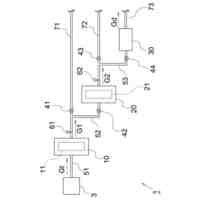
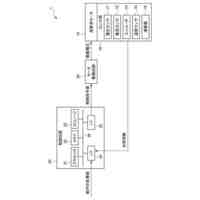
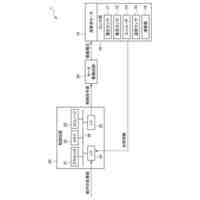
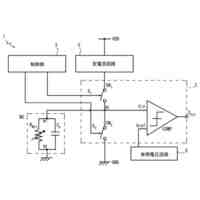
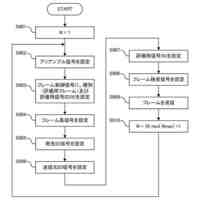
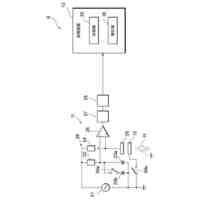
【解決手段】静電容量式センサとしてのセンサ6は、検知用電極25を有し、検知用電極25と人H等の物体との間に生じる静電容量に応じたセンサ値を出力する検知用センサ11と、検知用電極25と対向して設けられ、スイッチ30bを介して基準電位へ接続された参照用電極12と、スイッチ30bを開閉制御して、参照用電極12が開放された第1状態と、参照用電極12が基準電位へ接続された第2状態とを切り替える処理装置13と、を備える。
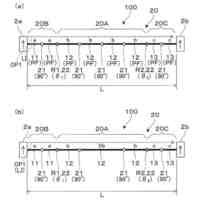
【選択図】図2
特許請求の範囲
【請求項1】
検知用電極を有し、前記検知用電極と物体との間に生じる静電容量に応じたセンサ値を出力する検知用センサと、
前記検知用電極と対向して設けられ、スイッチを介して基準電位へ接続された参照用電極と、
前記スイッチを開閉制御して、前記参照用電極が開放された第1状態と、前記参照用電極が基準電位へ接続された第2状態とを切り替える処理装置と、
を備えることを特徴とする静電容量式センサ。
続きを表示(約 1,000 文字)
【請求項2】
前記処理装置は、前記第1状態における前記センサ値を、前記第2状態における前記センサ値により補正することを特徴とする請求項1に記載の静電容量式センサ。
【請求項3】
前記第1状態における前記センサ値は、開放された前記参照用電極を介して、前記検知用電極と、物体との間に形成される静電容量に応じた値であり、
前記第2状態における前記センサ値は、前記検知用電極と、基準電位へ接続された前記参照用電極との間に形成される静電容量に応じた値であることを特徴とする請求項1又は2に記載の静電容量式センサ。
【請求項4】
検知用電極を有し、前記検知用電極と物体との間に生じる静電容量に応じたセンサ値を出力する検知用センサと、
前記検知用電極と異なる位置に設けられ、周囲空気を介して対を成す電極を有する参照用センサと、
前記参照用センサに基づいて前記周囲空気に対応する誘電率を算出し、前記センサ値を前記誘電率により補正する処理装置と、
を備えることを特徴とする静電容量式センサ。
【請求項5】
前記検知用センサの前記検知用電極と、前記参照用センサとは異なる部材にそれぞれ設けられることを特徴とする請求項4に記載の静電容量式センサ。
【請求項6】
前記検知用センサは複数設けられており、
前記参照用センサは複数の前記検知用センサに対して1つ設けられており、
前記処理装置は、前記参照用センサにより算出した前記誘電率を用いて前記検知用センサのそれぞれの前記センサ値を補正することを特徴とする請求項4又は5に記載の静電容量式センサ。
【請求項7】
基台と、
前記基台に対して設けられた複数のアームと、
請求項1又は2に記載の静電容量式センサと、
を備え、
前記検知用電極及び前記参照用電極は、前記アームに設けられていることを特徴とするロボットシステム。
【請求項8】
基台と、
前記基台に対して設けられた複数のアームと、
請求項4又は5に記載の静電容量式センサと、
を備え、
前記検知用センサの前記検知用電極は、前記アームに設けられ、
前記参照用センサは、前記基台に設けられることを特徴とするロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、静電容量式センサ及びロボットシステムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
人とロボットとが協働してワークに対して作業を行う場合がある。このような場合に用いるロボットを協働ロボットという。協働ロボットは、作業環境を人と共有するため、人に対する安全性が求められる。このため、協働ロボットにおいて、近くの物体を検知する静電容量式センサが搭載される場合がある。
【0003】
静電容量式センサは、周囲の温度や湿度の変化により既知のドリフトが発生する場合がある。ドリフトが発生すると検出精度が劣化する可能性がある。特に、静電容量式センサにおいて検知可能な距離を長く設定する場合にドリフトの影響が顕著となる。
【0004】
例えば特許文献1においては、静電容量式センサであって、検知電極と参照電極とを用い、温度や湿度といった空気状態の変化に対する検知電極の信号の変動を、参照電極の信号により補正することが記載されている。
【先行技術文献】
【特許文献】
【0005】
特開2006-145413号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1では、補正用の参照電極において物体が検知されないようにする必要がある。このため、特許文献1では、参照電極の周囲に十分なスペースを確保してシールド等を設置するといった周囲環境が必要となる可能性がある。
【0007】
上記課題に鑑み、本発明は、空気状態の変化に対して物体検知の補正が可能であると共に、補正に係る構成を簡易化することのできる静電容量式センサ及びロボットシステムを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明に係る静電容量式センサは、検知用電極を有し、前記検知用電極と物体との間に生じる静電容量に応じたセンサ値を出力する検知用センサと、前記検知用電極と対向して設けられ、スイッチを介して基準電位へ接続された参照用電極と、前記スイッチを開閉制御して、前記参照用電極が開放された第1状態と、前記参照用電極が基準電位へ接続された第2状態とを切り替える処理装置と、を備える。
【0009】
また、静電容量式センサにおいて、前記処理装置は、前記第1状態における前記センサ値を、前記第2状態における前記センサ値により補正する。
【0010】
また、静電容量式センサにおいて、前記第1状態における前記センサ値は、開放された前記参照用電極を介して、前記検知用電極と、物体との間に形成される静電容量に応じた値であり、前記第2状態における前記センサ値は、前記検知用電極と、基準電位へ接続された前記参照用電極との間に形成される静電容量に応じた値である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
国立大学法人 東京大学
力センサ
7日前
国立大学法人 東京大学
ガス処理方法
1か月前
国立大学法人 東京大学
担持金属触媒
2か月前
国立大学法人 東京大学
せん妄判定方法
3か月前
国立大学法人 東京大学
コンパレータ回路
1か月前
国立大学法人 東京大学
ビーム追従システム
1か月前
国立大学法人 東京大学
超音波モータシステム
2か月前
国立大学法人 東京大学
超音波モータシステム
2か月前
国立大学法人 東京大学
超音波モータシステム
2か月前
国立大学法人 東京大学
光学装置及びレーザー
4か月前
AGC株式会社
組成物
4か月前
国立大学法人 東京大学
結晶、及びその製造方法
3か月前
国立大学法人 東京大学
肝臓オルガノイド成熟培地
1か月前
国立大学法人 東京大学
推定装置、及びプログラム
2か月前
国立大学法人 東京大学
テラヘルツ帯同期検波回路
2か月前
NTT株式会社
圧力センサ
2か月前
国立大学法人 東京大学
テラヘルツ波帯位相変調回路
2か月前
国立大学法人 東京大学
読出回路及び磁気メモリ装置
2か月前
国立大学法人 東京大学
接着性細胞の浮遊培養用基材
1か月前
国立大学法人 東京大学
嗅覚受容体の応答感度増強剤
4か月前
国立大学法人 東京大学
蛍光測定装置及び蛍光測定方法
今日
国立大学法人 東京大学
ドローンを用いた配送システム
1か月前
国立大学法人 東京大学
情報処理装置、及びプログラム
2か月前
国立大学法人 東京大学
酸化腐食抑制能を有する電解液
20日前
ダイキン工業株式会社
冷凍装置
20日前
ダイキン工業株式会社
冷凍装置
20日前
国立大学法人 東京大学
光デバイス及びコヒーレント受信器
2か月前
株式会社アイシン
有機酸除去方法
5か月前
積水化学工業株式会社
酸素発生剤
2か月前
国立大学法人 東京大学
皮膚微生物叢を制御するための溶菌剤
4か月前
ダイキン工業株式会社
層及び構造体
4か月前
古河電気工業株式会社
超電導モータ
2か月前
国立大学法人 東京大学
通信装置、制御方法、及びプログラム
1か月前
国立大学法人 東京大学
ホウ素含有化合物及びそれを含む医薬
3か月前
国立大学法人 東京大学
静電容量式センサ及びロボットシステム
2か月前
京セラ株式会社
予測装置及び予測方法
15日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ