TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025156225
公報種別
公開特許公報(A)
公開日
2025-10-14
出願番号
2025054712
出願日
2025-03-28
発明の名称
インバータ制御装置
出願人
ダイキン工業株式会社
代理人
弁理士法人前田特許事務所
主分類
H02M
7/48 20070101AFI20251002BHJP(電力の発電,変換,配電)
要約
【課題】三相インバータの出力電流の脈動を抑制する。
【解決手段】インバータ制御装置に、各キャリア周期において、三相インバータの状態を、4種類の使用ベクトルに、スイッチング回数を最小とするように切り替えさせ、電気角60度毎に、4種類の使用ベクトルに含まれる1つの基本空間ベクトルを、異なる基本空間ベクトルに切り替えさせ、電気角60度毎に、各キャリア周期の最初のタイミングで使用される零ベクトルを、2種類の零ベクトルの間で切り替えさせる。基本空間ベクトル切り替え時におけるインバータ1周期あたりの6つの電気角を、0度、60度、120度、180度、240度、及び300度とみなしたとき、零ベクトル切り替え時におけるインバータ1周期あたりの6つの電気角は、基本空間ベクトル切り替え時の6つの電気角に15度以上45度未満の共通の所定角度をそれぞれ加えた角度となる。
【選択図】図2
特許請求の範囲
【請求項1】
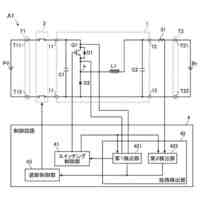
互いに直列に接続された上アームスイッチ(11~13)及び下アームスイッチ(14~16)を相毎に有する三相インバータ(10)を空間ベクトル変調により制御するインバータ制御装置であって、
インバータ周期をキャリア周期の整数倍にし、
各キャリア周期において、前記三相インバータ(10)の状態を、6種類の基本空間ベクトルのうち隣り合う2種類の基本空間ベクトルと零ベクトルである第1零ベクトル及び第2零ベクトルとを含む4種類の使用ベクトルに、スイッチング回数を最小とするように切り替え、
前記キャリア周期の半分の整数倍の期間毎に、前記空間ベクトル変調により、前記6種類の基本空間ベクトル、前記第1零ベクトル及び前記第2零ベクトルの中から前記4種類の使用ベクトルを選択するとともに、選択した前記4種類の使用ベクトルの長さを演算し、
前記三相インバータ(10)の状態を示す電圧ベクトルの各インバータ周期における軌跡の概形を円とし、
電気角60度毎に、前記4種類の使用ベクトルに含まれる1つの基本空間ベクトルを、異なる基本空間ベクトルに切り替えるよう前記空間ベクトル変調により選択し、
電気角60度毎に、各キャリア周期の最初のタイミングで使用される零ベクトルを前記第1零ベクトルと前記第2零ベクトルとの間で切り替え、
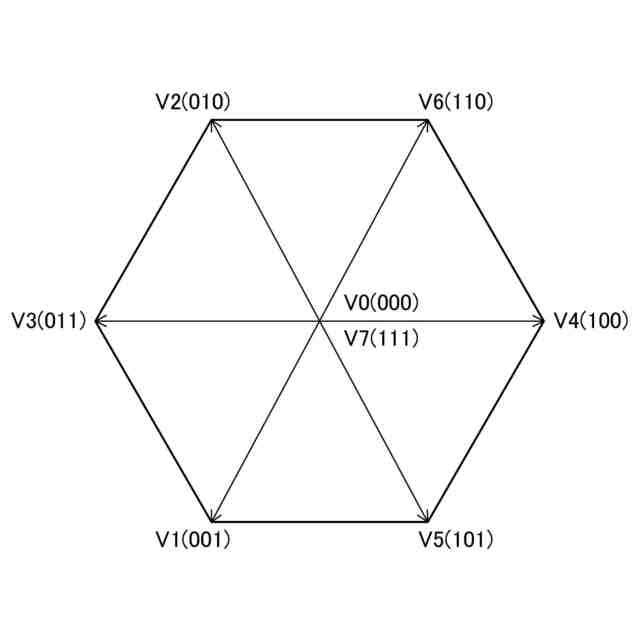
前記4種類の使用ベクトルに含まれる1つの基本空間ベクトルを切り替える基本空間ベクトル切り替え時におけるインバータ1周期あたりの6つの電気角を、前記円の軌跡を描く順に0度、60度、120度、180度、240度、及び300度とみなしたとき、前記各キャリア周期の最初のタイミングで使用される零ベクトルを前記第1零ベクトルと前記第2零ベクトルとの間で切り替える零ベクトル切り替え時におけるインバータ1周期あたりの6つの電気角は、前記基本空間ベクトル切り替え時の6つの電気角に15度以上45度未満の共通の所定角度をそれぞれ加えた角度であることを特徴とするインバータ制御装置。
続きを表示(約 2,800 文字)
【請求項2】
請求項1に記載のインバータ制御装置において、
前記基本空間ベクトル切り替え時における6つの電気角を、前記円の軌跡を描く順に0度、60度、120度、180度、240度、及び300度とみなしたとき、
前記零ベクトル切り替え時における6つの電気角は、30度、90度、150度、210度、270度及び330度であることを特徴とするインバータ制御装置。
【請求項3】
請求項1に記載のインバータ制御装置において、
xがU相の状態を示し、yがV相の状態を示し、zがW相の状態を示し、値1が、上アームスイッチ(11~13)がオンでかつ下アームスイッチ(14~16)がオフの状態を示し、値0が、上アームスイッチ(11~13)がオフでかつ下アームスイッチ(14~16)がオンの状態を示すベクトル(xyz)で前記三相インバータ(10)の状態を表した場合に、
前記4種類の使用ベクトルに含まれる一方の基本空間ベクトルが切り替えられ、かつ他方の基本空間ベクトルがベクトル(100)であるときの電気角を0度とみなしたとき、前記各キャリア周期の最初のタイミングで使用される零ベクトルがベクトル(000)となる期間が、0度に前記所定角度を加えた電気角で開始し、電気角60度分の期間継続することを特徴とするインバータ制御装置。
【請求項4】
請求項1に記載のインバータ制御装置において、
xがU相の状態を示し、yがV相の状態を示し、zがW相の状態を示し、値1が、上アームスイッチ(11~13)がオンでかつ下アームスイッチ(14~16)がオフの状態を示し、値0が、上アームスイッチ(11~13)がオフでかつ下アームスイッチ(14~16)がオンの状態を示すベクトル(xyz)で前記三相インバータ(10)の状態を表した場合に、
前記4種類の使用ベクトルに含まれる一方の基本空間ベクトルが切り替えられ、かつ他方の基本空間ベクトルがベクトル(100)であるときの電気角を0度とみなしたとき、前記各キャリア周期の最初のタイミングで使用される零ベクトルがベクトル(111)となる期間が、0度に前記所定角度を加えた電気角で開始し、電気角60度分の期間継続することを特徴とするインバータ制御装置。
【請求項5】
請求項2に記載のインバータ制御装置において、
xがU相の状態を示し、yがV相の状態を示し、zがW相の状態を示し、値1が、上アームスイッチ(11~13)がオンでかつ下アームスイッチ(14~16)がオフの状態を示し、値0が、上アームスイッチ(11~13)がオフでかつ下アームスイッチ(14~16)がオンの状態を示すベクトル(xyz)で前記三相インバータ(10)の状態を表した場合に、
前記4種類の使用ベクトルに含まれる一方の基本空間ベクトルが切り替えられ、かつ他方の基本空間ベクトルがベクトル(100)であるときの電気角を0度とみなしたとき、電気角が30度~90度である期間に、前記各キャリア周期の最初のタイミングで使用される零ベクトルがベクトル(000)となることを特徴とするインバータ制御装置。
【請求項6】
請求項1に記載のインバータ制御装置において、
xがU相の状態を示し、yがV相の状態を示し、zがW相の状態を示し、値1が、上アームスイッチ(11~13)がオンでかつ下アームスイッチ(14~16)がオフの状態を示し、値0が、上アームスイッチ(11~13)がオフでかつ下アームスイッチ(14~16)がオンの状態を示すベクトル(xyz)で前記三相インバータ(10)の状態を表した場合に、
前記4種類の使用ベクトルに含まれる一方の基本空間ベクトルが切り替えられ、かつ他方の基本空間ベクトルがベクトル(100)であるときの電気角を0度とみなしたとき、電気角が30度~90度である期間に、前記各キャリア周期の最初のタイミングで使用される零ベクトルが、ベクトル(111)となることを特徴とするインバータ制御装置。
【請求項7】
請求項1~6のいずれか1項に記載のインバータ制御装置において、
前記三相インバータ(10)の出力電圧の周波数が、前記三相インバータ(10)の運転周波数範囲の中央値よりも高い所定値を超える場合に、前記インバータ周期を前記キャリア周期の整数倍とすることを特徴とするインバータ制御装置。
【請求項8】
互いに直列に接続された上アームスイッチ(11~13)及び下アームスイッチ(14~16)を相毎に有する三相インバータ(10)を空間ベクトル変調により制御するインバータ制御装置であって、
インバータ周期をキャリア周期の整数倍にし、
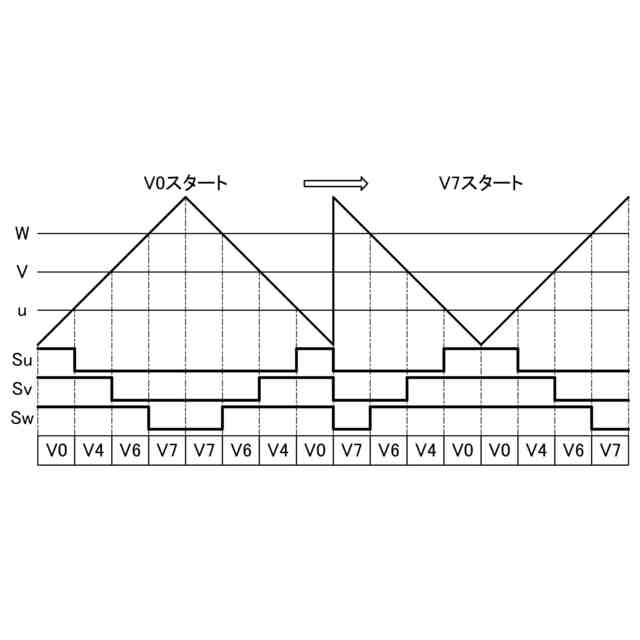
キャリア波として使用する三角波を、正の傾きで開始する三角波と、負の傾きで開始する三角波とに電気角60度毎に切り替えることを特徴とするインバータ制御装置。
【請求項9】
請求項8に記載のインバータ制御装置において、
各キャリア周期において、前記三相インバータ(10)の状態を、6種類の基本空間ベクトルのうち隣り合う2種類の基本空間ベクトルと零ベクトルである第1零ベクトル及び第2零ベクトルとを含む4種類の使用ベクトルに、スイッチング回数を最小とするように切り替え、
xがU相の状態を示し、yがV相の状態を示し、zがW相の状態を示し、値1が、上アームスイッチ(11~13)がオンでかつ下アームスイッチ(14~16)がオフの状態を示し、値0が、上アームスイッチ(11~13)がオフでかつ下アームスイッチ(14~16)がオンの状態を示すベクトル(xyz)で前記三相インバータ(10)の状態を表した場合に、
前記4種類の使用ベクトルに含まれる2種類の基本空間ベクトルのうち、前記キャリア周期における時間が長い方の基本空間ベクトルが、(001)、(010)、(100)のうちのいずれかであるときには、正及び負の傾きのうちの一方の傾きで開始する三角波を前記キャリア波として使用する一方、
前記4種類の使用ベクトルに含まれる2種類の基本空間ベクトルのうち、前記キャリア周期における時間が長い方の基本空間ベクトルが、(011)、(101)、(110)のうちのいずれかであるときには、正及び負の傾きのうちの他方の傾きで開始する三角波を前記キャリア波として使用することを特徴とするインバータ制御装置。
【請求項10】
請求項8又は9に記載のインバータ制御装置において、
前記三相インバータ(10)の出力電圧の周波数が、前記三相インバータ(10)の運転周波数範囲の中央値よりも高い所定値を超える場合に、前記インバータ周期を前記キャリア周期の整数倍とすることを特徴とするインバータ制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、三相インバータを空間ベクトル変調により制御するインバータ制御装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
特許文献1には、互いに直列に接続された上アームスイッチ及び下アームスイッチを相毎に有する三相インバータを空間ベクトル変調により制御するインバータ制御装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特公平6-32593号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、三相インバータを空間ベクトル変調により制御する場合、各キャリア周期の最初の三相インバータの状態を常に同じ零ベクトルにすると、各インバータ周期における電圧ベクトルの軌跡が非対称な形状となる。その結果、三相インバータの出力電圧の不平衡率が増大し、三相インバータの出力電流の脈動が増大する。
【0005】
本開示の目的は、三相インバータの出力電流の脈動を抑制することにある。
【課題を解決するための手段】
【0006】
本開示の第1の態様は、互いに直列に接続された上アームスイッチ(11~13)及び下アームスイッチ(14~16)を相毎に有する三相インバータ(10)を空間ベクトル変調により制御するインバータ制御装置であって、インバータ周期をキャリア周期の整数倍にし、各キャリア周期において、前記三相インバータ(10)の状態を、6種類の基本空間ベクトルのうち隣り合う2種類の基本空間ベクトルと零ベクトルである第1零ベクトル及び第2零ベクトルとを含む4種類の使用ベクトルに、スイッチング回数を最小とするように切り替え、前記キャリア周期の半分の整数倍の期間毎に、前記空間ベクトル変調により、前記6種類の基本空間ベクトル、前記第1零ベクトル及び前記第2零ベクトルの中から前記4種類の使用ベクトルを選択するとともに、選択した前記4種類の使用ベクトルの長さを演算し、前記三相インバータ(10)の状態を示す電圧ベクトルの各インバータ周期における軌跡の概形を円とし、電気角60度毎に、前記4種類の使用ベクトルに含まれる1つの基本空間ベクトルを、異なる基本空間ベクトルに切り替えるよう前記空間ベクトル変調により選択し、電気角60度毎に、各キャリア周期の最初のタイミングで使用される零ベクトルを前記第1零ベクトルと前記第2零ベクトルとの間で切り替え、前記4種類の使用ベクトルに含まれる1つの基本空間ベクトルを切り替える基本空間ベクトル切り替え時におけるインバータ1周期あたりの6つの電気角を、前記円の軌跡を描く順に0度、60度、120度、180度、240度、及び300度とみなしたとき、前記各キャリア周期の最初のタイミングで使用される零ベクトルを前記第1零ベクトルと前記第2零ベクトルとの間で切り替える零ベクトル切り替え時におけるインバータ1周期あたりの6つの電気角は、前記基本空間ベクトル切り替え時の6つの電気角に15度以上45度未満の共通の所定角度をそれぞれ加えた角度であることを特徴とする。
【0007】
第1の態様では、各インバータ周期における電圧ベクトルの軌跡のひずみを抑制できる。したがって、三相インバータ(10)の出力電圧の不平衡率を低減し、三相インバータ(10)の出力電流の脈動を抑制できる。
【0008】
本開示の第2の態様は、第1の態様において、前記基本空間ベクトル切り替え時における6つの電気角を、前記円の軌跡を描く順に0度、60度、120度、180度、240度、及び300度とみなしたとき、前記零ベクトル切り替え時における6つの電気角は、30度、90度、150度、210度、270度及び330度であることを特徴とする。
【0009】
第2の態様では、各インバータ周期における電圧ベクトルの軌跡を対称にできる。
【0010】
本開示の第3の態様は、第1又は第2の態様において、xがU相の状態を示し、yがV相の状態を示し、zがW相の状態を示し、値1が、上アームスイッチ(11~13)がオンでかつ下アームスイッチ(14~16)がオフの状態を示し、値0が、上アームスイッチ(11~13)がオフでかつ下アームスイッチ(14~16)がオンの状態を示すベクトル(xyz)で前記三相インバータ(10)の状態を表した場合に、前記4種類の使用ベクトルに含まれる一方の基本空間ベクトルが切り替えられ、かつ他方の基本空間ベクトルがベクトル(100)であるときの電気角を0度とみなしたとき、前記各キャリア周期の最初のタイミングで使用される零ベクトルがベクトル(000)となる期間が、0度に前記所定角度を加えた電気角で開始し、電気角60度分の期間継続することを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
単極モータ
1日前
株式会社アイシン
ロータ
1日前
株式会社アイシン
ロータ
5日前
西部電機株式会社
充電装置
8日前
日本精機株式会社
サージ保護回路
8日前
西部電機株式会社
充電装置
8日前
トヨタ自動車株式会社
回転子
12日前
トヨタ自動車株式会社
固定子
6日前
個人
連続ガウス加速器形磁力増幅装置
8日前
トヨタ自動車株式会社
製造装置
6日前
東京瓦斯株式会社
通信装置
7日前
株式会社アイシン
ステータ
5日前
株式会社ダイヘン
充電装置
5日前
株式会社ダイヘン
充電装置
5日前
株式会社ダイヘン
充電装置
5日前
株式会社アイシン
ステータ
5日前
株式会社ダイヘン
充電装置
5日前
株式会社アイシン
ステータ
5日前
カヤバ株式会社
筒型リニアモータ
7日前
株式会社ミツバ
ブラシレスモータ
7日前
株式会社アイシン
ステータ
5日前
個人
太陽エネルギー収集システム
6日前
株式会社kaisei
発電システム
1日前
トヨタ自動車株式会社
被膜形成装置
6日前
ニチコン株式会社
AC入力検出回路
12日前
ASTI株式会社
電力変換装置
6日前
株式会社ダイヘン
電力変換装置
8日前
東京瓦斯株式会社
給電システム
7日前
株式会社ダイヘン
電力システム
8日前
株式会社ミツバ
回転電機
5日前
株式会社デンソー
電力変換装置
今日
株式会社デンソー
電力変換装置
12日前
株式会社アイシン
回転電機
8日前
大和ハウス工業株式会社
システム
7日前
シャープ株式会社
表示装置
6日前
株式会社アイシン
回転電機
12日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ