TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025154836
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024058058
出願日
2024-03-29
発明の名称
ロボット制御装置、代表物体情報生成装置、操作情報付与装置、方法、及びプログラム
出願人
オムロン株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
B25J
13/08 20060101AFI20251002BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】形状又は大きさの異なる物体をロボットに操作させる場合であっても、物体毎に3次元モデルを用意することなく、ロボットに対して物体の操作を実行させる。
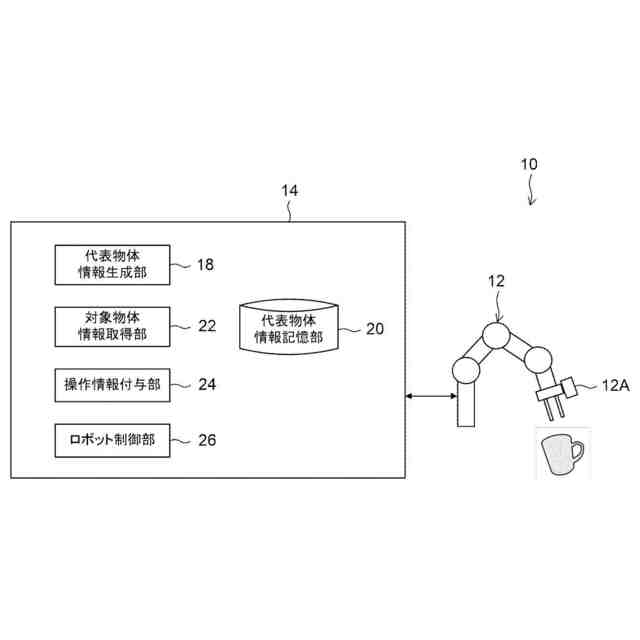
【解決手段】ロボット制御装置14は、物体についての分類である物体分類のそれぞれについて代表形状を利用可能にする処理、及び代表形状に対するロボットの操作を示す操作情報を代表形状のうち当該操作の対象となる部位である操作部位に付与する処理を行う。ロボット制御装置14は、操作対象とする物体である対象物体の形状を表す観測形状及び対象物体が属する物体分類を取得する。ロボット制御装置14は、対象物体が属する物体分類に対応する代表形状に関連付けられた操作情報を、操作部位に対応する観測形状の部位に付与する。ロボット制御装置14は、観測形状に付与された操作情報に基づいて対象物体への前記ロボットの操作を制御する。
【選択図】図1
特許請求の範囲
【請求項1】
物体へのロボットの操作を制御するロボット制御装置であって、
前記物体についての分類である物体分類のそれぞれについて代表形状を利用可能にする処理、及び前記代表形状に対する前記ロボットの操作を示す操作情報を前記代表形状のうち当該操作の対象となる部位である操作部位に付与する処理を行う代表物体情報生成部と、
操作対象とする前記物体である対象物体の形状を表す観測形状及び前記対象物体が属する前記物体分類を取得する対象物体情報取得部と、
前記対象物体が属する前記物体分類に対応する前記代表形状に関連付けられた前記操作情報を、前記操作部位に対応する前記観測形状の部位に付与する操作情報付与部と、
前記観測形状に付与された前記操作情報に基づいて前記対象物体への前記ロボットの操作を制御するロボット制御部と、を備える、
ロボット制御装置。
続きを表示(約 2,200 文字)
【請求項2】
物体についての分類である物体分類のそれぞれについて代表形状を利用可能にする処理、及び前記代表形状に対するロボットの操作を示す操作情報を前記代表形状のうち当該操作の対象となる部位である操作部位に付与する処理を行う代表物体情報生成部
を備える代表物体情報生成装置。
【請求項3】
物体についての分類である物体分類のそれぞれについての代表形状であって、前記代表形状に対するロボットの操作を示す操作情報が前記代表形状のうち当該操作の対象となる部位である操作部位に付与された前記代表形状を含む情報を取得する代表物体情報取得部と、
操作対象とする前記物体である対象物体の形状を表す観測形状及び前記対象物体が属する前記物体分類を取得する対象物体情報取得部と、
前記対象物体が属する前記物体分類に対応する前記代表形状に関連付けられた前記操作情報を、前記操作部位に対応する前記観測形状の部位に付与する操作情報付与部と、を備える、
操作情報付与装置。
【請求項4】
前記対象物体情報取得部は、前記対象物体が写る画像を入力して前記物体分類を出力するように学習された第1学習済みモデルに対して、前記対象物体が写る画像を入力することにより、前記対象物体が属する物体分類を取得する、
請求項3に記載の操作情報付与装置。
【請求項5】
前記対象物体情報取得部は、
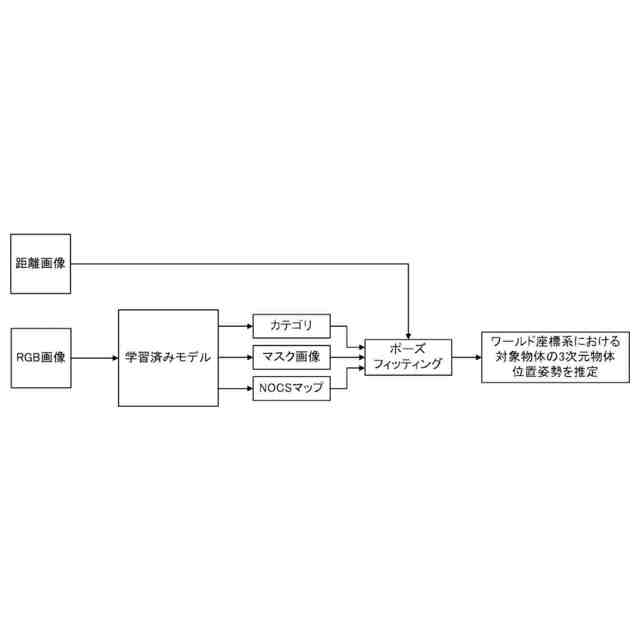
前記対象物体が写る画像についての距離情報を取得し、
前記対象物体が写る画像を入力して当該対象物体の属する前記物体分類に対応する前記代表形状のNOCSマップであって当該画像中の前記対象物体に位置合わせされたNOCSマップ及び前記対象物体が占める範囲を示すマスク画像を出力するように学習された第2学習済みモデルに対して、当該対象物体が写る画像を入力することにより、前記対象物体が写る画像に対して位置合わせされた、当該対象物体の属する前記物体分類に対応する前記代表形状のNOCSマップ及び前記マスク画像を取得し、
前記マスク画像及び前記距離情報からワールド座標系に位置付けられた前記観測形状を特定し、
前記距離情報及び前記NOCSマップから前記観測形状のワールド座標系における位置、姿勢、及び大きさを特定し、
前記観測形状のワールド座標系における位置、姿勢、及び大きさに基づいて前記代表形状をワールド座標に位置づけ、
前記ワールド座標系に位置づけられた前記代表形状と前記観測形状との間の部位毎の偏差を算出し、
前記操作情報付与部は、前記偏差に基づいて前記操作情報を前記観測形状の部位に付与する、
請求項3に記載の操作情報付与装置。
【請求項6】
前記操作情報は、さらに、前記操作部位の形状を近似した近似形状を示す近似形状情報を含み、
前記操作部位に対応する前記観測形状の部位が前記操作部位に対応する前記対象物体の部位の一部である場合に、前記観測形状及び前記近似形状情報に基づいて前記操作部位に対応する前記対象物体の部位の全体の形状を前記近似形状に近似することにより推定する、対象物体形状推定部をさらに備える、
請求項1に記載のロボット制御装置。
【請求項7】
前記操作情報には、前記ロボットが把持する領域を表す把持領域情報と、前記ロボットが暫定的に把持する領域を表す暫定把持領域情報とが含まれており、
前記操作情報付与部は、前記観測形状に対して前記把持領域情報及び前記暫定把持領域情報を付加し、
前記ロボット制御部は、前記把持領域情報内に写る前記観測形状の領域が所定大きさ未満である場合には、前記対象物体の前記暫定把持領域情報が表す部位を把持するように前記ロボットの操作を制御する、
請求項1に記載のロボット制御装置。
【請求項8】
前記ロボット制御部は、前記対象物体の前記暫定把持領域情報が表す部位を把持するように前記ロボットの操作を制御し、前記対象物体の位置又は姿勢を変化させた後に、前記把持領域情報内に写る前記観測形状の領域が所定大きさ以上となった場合には、前記対象物体の前記把持領域情報を把持するように前記ロボットの操作を制御する、
請求項7に記載のロボット制御装置。
【請求項9】
前記操作情報には、前記ロボットが把持する領域を表す把持領域情報が含まれており、
前記操作情報付与部は、前記観測形状に対して前記把持領域情報を付与した際に、前記把持領域情報内に写る前記観測形状の領域が所定大きさ未満である場合には、異なる視点から取得された前記観測形状に対して前記把持領域情報を付与する、
請求項1に記載のロボット制御装置。
【請求項10】
前記操作情報には、前記ロボットが把持する領域を表す把持領域情報が含まれており、
前記ロボット制御部は、前記把持領域情報内に写る前記観測形状の領域が所定大きさ未満である場合には、前記代表形状に対して予め付与されている対称性情報を参照して、前記操作部位に対応する前記対象物体の部位の形状を推定し、当該部位を把持するように前記ロボットの操作を制御する、
請求項1に記載のロボット制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボット制御装置、代表物体情報生成装置、操作情報付与装置、方法、及びプログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1には、ロボットのハンドによる把持対象物の把持方法が開示されている。この把持方法は、把持対象物の3次元モデルであってロボットが把持すべき位置が設定された3次元モデルを予め用意しておき、把持対象物の位置及び姿勢を3次元モデルとのマッチングにより求めその位置及び姿勢における把持位置を3次元モデルから特定することにより、ロボットに把持対象物を把持させる方法である。
【先行技術文献】
【特許文献】
【0003】
特開2013-46937号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、例えば、対象物体を把持させる等の動作をロボットに実行させる場合、対象物体の形状及び大きさは様々であることが想定される。しかし、ロボットが対象物体を把持する等の操作を実行する部位である操作部位は、特定の形状特徴を有している場合もある。
【0005】
例えば、対象物体が取手付きコップの場合、取手の形状又は大きさ、又は、コップ本体の形状及び大きさが様々であったとしても、ロボットのハンドが把持する部位はいずれも取手である場合がある。また、製造工程の組立作業において、ロボットが部品を把持するような場合にも、部品それぞれの形状又は大きさが異なっていても、組立作業のために規定された操作部位はどの部品にも共通して設けられた突起部、くぼみ部、又は外形側面部等とされる場合がある。
【0006】
上記特許文献1の方法では、対象物体と3次元モデルとをマッチングさせるため、対象物体それぞれにおいて操作部位の形状特徴が共通していても、対象物体の形状又は大きさが異なるのであれば、その対象物体毎に3次元モデルを用意しなければならない。
【0007】
また、対象物体に対するロボットの操作を設定し、ロボットがその操作を実行できるようにした後において、その対象物体に対する操作の仕方を変更する場合がある。例えば、対象物体が取手付きコップの場合、操作部位を取手としロボットにその取手を把持させるようにした後に、操作部位をコップ本体に変更しロボットにコップ本体を把持させるようにする場合などである。
【0008】
本開示は、形状又は大きさの異なる物体をロボットに操作させる場合であっても、物体毎に3次元モデルを用意することなく、ロボットに対して物体の操作を実行させ、かつ、ロボットに操作を実行できるようにした後においてその操作を容易に変更することができる、ロボット制御装置、代表物体情報生成装置、操作情報付与装置、方法、及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために、本開示に係るロボット制御装置は、物体へのロボットの操作を制御するロボット制御装置であって、前記物体についての分類である物体分類のそれぞれについて代表形状を利用可能にする処理、及び前記代表形状に対する前記ロボットの操作を示す操作情報を前記代表形状のうち当該操作の対象となる部位である操作部位に付与する処理を行う代表物体情報生成部と、操作対象とする前記物体である対象物体から観測された形状を表す観測形状及び前記対象物体が属する前記物体分類を取得する対象物体情報取得部と、前記対象物体が属する前記物体分類に対応する前記代表形状に関連付けられた前記操作情報を、前記操作部位に対応する前記観測形状の部位に付与する操作情報付与部と、前記観測形状に付与された前記操作情報に基づいて前記対象物体への前記ロボットの操作を制御するロボット制御部と、を備える、ロボット制御装置である。
【0010】
また、本開示の代表物体情報生成装置は、物体についての分類である物体分類のそれぞれについて代表形状を利用可能にする処理、及び前記代表形状に対するロボットの操作を示す操作情報を前記代表形状のうち当該操作の対象となる部位である操作部位に付与する処理を行う代表物体情報生成部を備える代表物体情報生成装置である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
オムロン株式会社
電磁継電器
1か月前
オムロン株式会社
センサシステム
11日前
オムロン株式会社
センサシステム
11日前
オムロン株式会社
センサシステム
11日前
オムロン株式会社
サーボドライバ
22日前
オムロン株式会社
発光エンブレム
22日前
オムロン株式会社
システム及び方法
11日前
オムロン株式会社
システム及び方法
11日前
オムロン株式会社
パワーコンディショナ
1か月前
オムロン株式会社
電力システム及び制御装置
1か月前
オムロン株式会社
電力供給システム及び電力制御装置
1か月前
オムロン株式会社
監視装置、監視方法及びプログラム
15日前
オムロン株式会社
情報処理システムおよび情報処理方法
29日前
オムロン株式会社
制御装置、制御方法、及び制御プログラム
29日前
オムロン株式会社
画像処理装置、画像処理方法及びプログラム
29日前
オムロン株式会社
処理装置、処理方法、および処理プログラム
25日前
オムロン株式会社
処理装置、処理方法、および処理プログラム
25日前
オムロン株式会社
管理システム、管理方法及び管理プログラム
15日前
オムロン株式会社
変換装置、変換方法、および、変換プログラム
1日前
オムロン株式会社
モデル生成方法、推論プログラム及び推論装置
22日前
オムロン株式会社
制御装置、情報処理方法および情報処理プログラム
29日前
オムロン株式会社
物体検出装置、物体検出方法、および制御プログラム
22日前
オムロン株式会社
情報処理装置、情報処理方法及び情報処理プログラム
11日前
オムロン株式会社
感震センサおよび地震検知方法、地震検知プログラム
11日前
オムロン株式会社
感震センサおよび地震検知方法、地震検知プログラム
11日前
オムロン株式会社
情報処理装置、情報処理方法及び情報処理プログラム
11日前
オムロン株式会社
感震センサおよび地震検知方法、地震検知プログラム
11日前
オムロン株式会社
感震センサおよび地震検知方法、地震検知プログラム
17日前
オムロン株式会社
感震センサおよび地震検知方法、地震検知プログラム
12日前
オムロン株式会社
走行制御装置、走行制御方法、及び走行制御プログラム
1か月前
オムロン株式会社
雨滴検出装置、雨滴検出方法および雨滴検出プログラム
1か月前
オムロン株式会社
オドメトリパラメータ較正装置、方法、及びプログラム
29日前
オムロン株式会社
表示制御装置、表示制御方法および表示制御プログラム
24日前
オムロン株式会社
混雑制御システム、混雑制御方法及び混雑制御プログラム
12日前
オムロン株式会社
設計支援方法、設計支援装置、プログラム、及び記録媒体
1か月前
オムロン株式会社
入出場管理システム、入出場管理方法、及び入出場管理プログラム
1か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ