TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025141689
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024041739
出願日
2024-03-15
発明の名称
走行制御装置、走行制御方法、及び走行制御プログラム
出願人
オムロン株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
G05D
1/622 20240101AFI20250919BHJP(制御;調整)
要約
【課題】本開示は、走行速度が大きいほど長い検出距離を設けその検出距離内に障害物を検出した場合に減速する車両において、検出距離内に障害物が入り車両が急激に減速する事態の発生頻度を低減して走行させる。
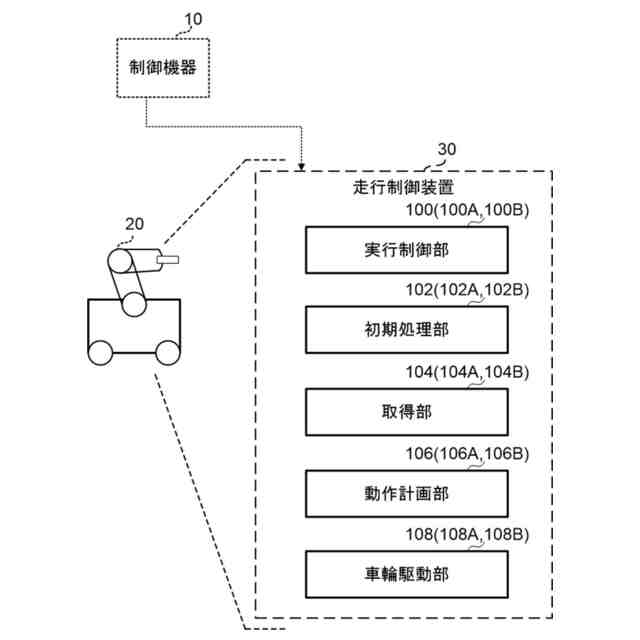
【解決手段】走行制御装置30は、車両20の前端から前方に向かって車両の並進速度が大きいほど大きい長さと車両の幅に近似した幅を有する安全領域が設定された車両の走行制御装置30であって、車両の走行において車体が障害物に干渉しないように設定された目標経路を取得する初期処理部102と、車両の位置、姿勢、並進速度及び角速度を含む車両状態、並びに車両周辺の障害物の配置情報を取得する取得部104と、目標経路に基づいて将来の車両状態の少なくとも一部についての候補状態を設定し、候補状態に基づいて安全領域内に障害物が侵入しないように車両の並進速度及び角速度の少なくとも一方を決定する動作計画部106とを備える。
【選択図】図3
特許請求の範囲
【請求項1】
車両の前端から前方に向かって前記車両の並進速度が大きいほど大きい長さと前記車両の幅に近似した幅を有する安全領域が設定された前記車両の走行制御装置であって、
前記車両の走行において車体が障害物に干渉しないように設定された目標経路を取得する初期処理部と、
前記車両の位置、姿勢、並進速度及び角速度を含む車両状態、並びに前記車両周辺の前記障害物の配置情報を取得する取得部と、
前記目標経路に基づいて将来の前記車両状態の少なくとも一部についての候補状態を設定し、前記候補状態に基づいて前記安全領域内に前記障害物が侵入しないように前記車両の並進速度及び角速度の少なくとも一方を決定する動作計画部とを備える、
走行制御装置。
続きを表示(約 2,400 文字)
【請求項2】
前記初期処理部は、さらに、前記目標経路上の各位置における目標並進速度を取得又は設定し、
前記動作計画部は、それぞれ複数離散的に用意され予測対象時間範囲内にわたって一定値である可能並進速度及び可能角速度の組み合わせを設定する処理、前記組み合わせごとに、前記取得部が取得した位置及び姿勢に基づいて前記予測対象時間範囲内についての前記車両の位置の系列である前記候補状態を設定し、前記候補状態の終端における前記車両の位置と前記目標経路との間の誤差及び前記可能並進速度と前記取得部が取得した位置に対応する前記目標並進速度との間の誤差を含むコストを算出する処理、及び前記配置情報に基づいて前記候補状態のすべての位置における前記車両及び前記安全領域が前記障害物と干渉しないことを条件として前記コストが最小となる、調整並進速度及び調整角速度の組み合わせを求める処理を行い、
前記調整並進速度及び前記調整角速度に基づいて前記車両の車輪を駆動する車輪駆動部と、
前記初期処理部を実行させ、その後、前記車両の走行に伴って、前記取得部、前記動作計画部及び前記車輪駆動部を実行することを繰り返す実行制御部とをさらに備える、
請求項1記載の走行制御装置。
【請求項3】
前記初期処理部は、さらに、前記目標経路上の各位置における目標並進速度を取得又は設定し、
前記動作計画部は、複数離散的に用意され予測対象時間範囲内にわたって一定値である可能並進速度を設定する処理、前記可能並進速度ごとに、前記取得部が取得した位置及び前記目標経路に基づいて前記予測対象時間範囲内についての前記目標経路上の前記車両の位置の系列である前記候補状態を設定する処理、前記配置情報に基づいて前記候補状態のすべての位置における前記車両及び前記安全領域が前記障害物と干渉しないことを条件として前記可能並進速度のうち前記取得部が取得した位置に対応する目標並進速度との差が最小となる調整並進速度を求める処理、及び前記調整並進速度及び前記目標経路に基づいて調整角速度を求める処理を行い、
前記調整並進速度及び前記調整角速度に基づいて前記車両の車輪を駆動する車輪駆動部と、
前記初期処理部を実行させ、その後、前記車両の走行に伴って、前記取得部、前記動作計画部及び前記車輪駆動部を実行することを繰り返す実行制御部とをさらに備える、
請求項1記載の走行制御装置。
【請求項4】
前記動作計画部は、前記目標経路に基づいて生成された位置の系列である目標位置系列を取得する処理、取得した前記車両状態に基づいて予測対象時間範囲内にわたる候補並進速度及び候補角速度の系列である指令系列を設定し、前記指令系列に基づいて候補となる前記車両の位置の系列である前記候補状態を求める処理、及び前記配置情報に基づいて前記候補状態のすべての位置における前記車両及び前記安全領域を前記障害物と干渉させないことを条件として前記予測対象時間範囲内にわたる前記目標位置系列と前記候補状態との間の誤差量を含む評価値を最小にする前記指令系列に基づいて調整並進速度及び調整角速度を求める処理を行い、
前記調整並進速度及び前記調整角速度に基づいて前記車両の車輪を駆動する車輪駆動部と、
前記初期処理部を実行させ、その後、前記車両の走行に伴って、前記取得部、前記動作計画部及び前記車輪駆動部を実行することを繰り返す実行制御部とをさらに備える、
請求項1記載の走行制御装置。
【請求項5】
安全領域及び前記安全領域を設定するための前記車両の形状は、円状、長方形、及び多角形の何れかとして構成する、請求項1に記載の走行制御装置。
【請求項6】
前記形状を円状の複数の円として設定する場合、前記車両の形状を長方形とした場合の短い方の辺の長さを辺の長さとした複数の正方形の個数を算出し、前記車両の形状の長さ方向に並べた前記複数の正方形の各々に対する外接円を設定する、請求項5に記載の走行制御装置。
【請求項7】
車両の前端から前方に向かって前記車両の並進速度が大きいほど大きい長さと前記車両の幅に近似した幅を有する安全領域が設定された前記車両の走行制御方法であって、
前記車両の走行において車体が障害物に干渉しないように設定された目標経路を取得し、
前記車両の位置、姿勢、並進速度及び角速度を含む車両状態、並びに前記車両周辺の前記障害物の配置情報を取得し、
前記目標経路に基づいて将来の前記車両状態の少なくとも一部についての候補状態を設定し、前記候補状態に基づいて前記安全領域内に前記障害物が侵入しないように前記車両の並進速度及び角速度の少なくとも一方を決定する、
処理をコンピュータが実行する走行制御方法。
【請求項8】
コンピュータを、
車両の前端から前方に向かって前記車両の並進速度が大きいほど大きい長さと前記車両の幅に近似した幅を有する安全領域が設定された前記車両の走行制御装置において、
前記車両の走行において車体が障害物に干渉しないように設定された目標経路を取得する初期処理部、
前記車両の位置、姿勢、並進速度及び角速度を含む車両状態、並びに前記車両周辺の前記障害物の配置情報を取得する取得部、及び
前記目標経路に基づいて将来の前記車両状態の少なくとも一部についての候補状態を設定し、前記候補状態に基づいて前記安全領域内に前記障害物が侵入しないように前記車両の並進速度及び角速度の少なくとも一方を決定する動作計画部、
として機能させるための走行制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、走行制御装置、走行制御方法、及び走行制御プログラムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1には、障害物を検出するセンサを備えた車両の走行制御をする装置が記載されている。この装置は、センサにより車両前方の所定の検出距離内に障害物を検出すると車両の減速制御を行う。その検出距離は走行速度が大きいほど長い。これにより、車両の走行速度に関わらず障害物に衝突することを防止できる。
【先行技術文献】
【特許文献】
【0003】
特開平10-161745
【発明の概要】
【発明が解決しようとする課題】
【0004】
施設の敷地内のように道路の存在を前提としない環境で車両を障害物に衝突せずに走行させる方法として、走行前に車両が障害物に衝突しない目標経路と目標速度からなる走行計画を策定し、走行時に車両をその走行計画に従って走行させる方法がある。
【0005】
走行計画に従った車両の走行時において、障害物の位置が計画時とは異なる場合や車両の位置の認識誤差が生じて目標経路とは異なる経路を走行する場合があり、それにより車両が障害物に衝突する恐れがある。すなわち、車両を走行計画に従って走行させるときに、車両前方の障害物を検出して衝突を防止することが必要である。
【0006】
特許文献1に記載の衝突を防止する方法をそのまま用いると、走行中に検知距離内に障害物が入って初めて減速を開始し、その後障害物に近づきながら検知距離外に障害物が出るまで減速し続けることになる。これにより、障害物を検知する前の走行速度から急激に減速をすることになる
【0007】
本開示は、走行速度が大きいほど長い検出距離を設けその検出距離内に障害物を検出した場合に減速する車両において、検出距離内に障害物が入り車両が急激に減速する事態の発生頻度を低減して走行させる走行制御装置、走行制御方法、及び走行制御プログラムを提供することを、目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本開示に係る走行制御装置は、車両の前端から前方に向かって前記車両の並進速度が大きいほど大きい長さと前記車両の幅に近似した幅を有する安全領域が設定された前記車両の走行制御装置であって、前記車両の走行において車体が障害物に干渉しないように設定された目標経路を取得する初期処理部と、前記車両の位置、姿勢、並進速度及び角速度を含む車両状態、並びに前記車両周辺の前記障害物の配置情報を取得する取得部と、前記目標経路に基づいて将来の前記車両状態の少なくとも一部についての候補状態を設定し、前記候補状態に基づいて前記安全領域内に前記障害物が侵入しないように前記車両の並進速度及び角速度の少なくとも一方を決定する動作計画部とを備える。
【発明の効果】
【0009】
本開示によれば、検出距離内に障害物が入り車両が急激に減速する事態の発生頻度を低減して走行させる走行制御装置、走行制御方法、及び走行制御プログラムを提供することができる。
【図面の簡単な説明】
【0010】
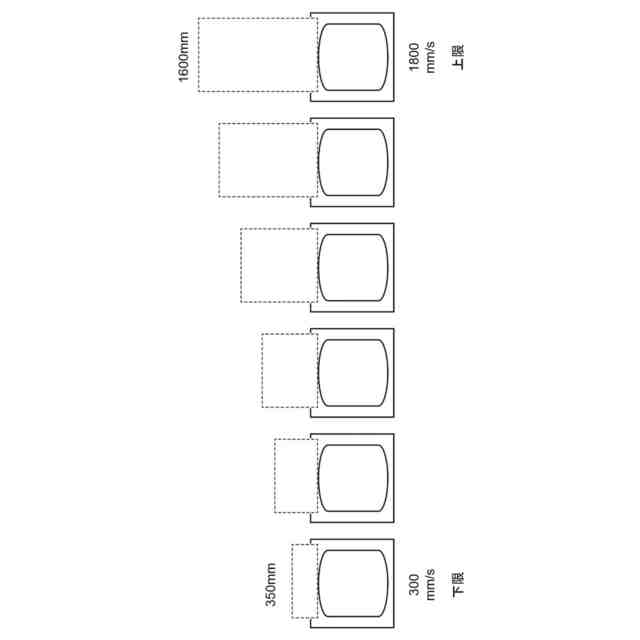
図1は、安全領域の一例を説明するための概略図である。
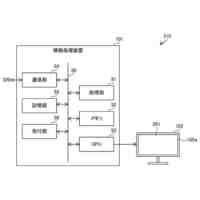
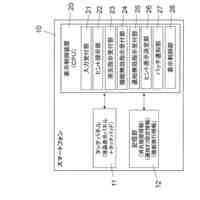
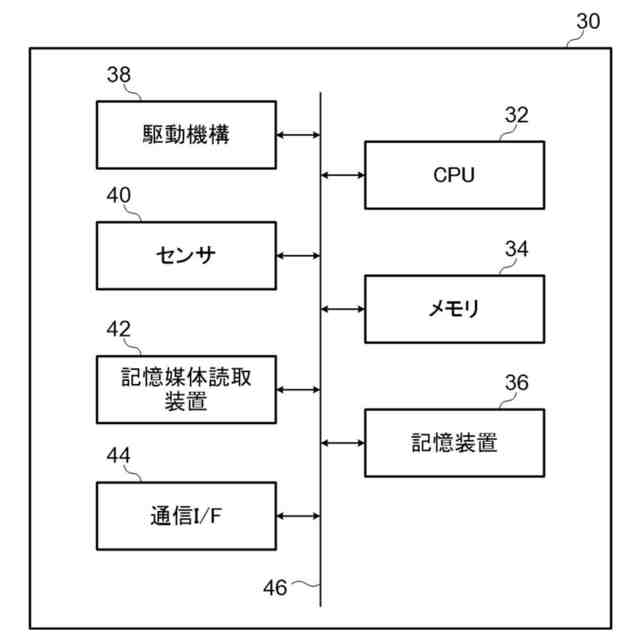
図2は、走行制御装置のハードウェア構成を示す図である。
図3は、本実施形態に係る走行制御装置の構成図である。
図4は、設定される候補状態を表すグリッドの一例である。
図5は、候補状態の設定の一例を説明するための図である。
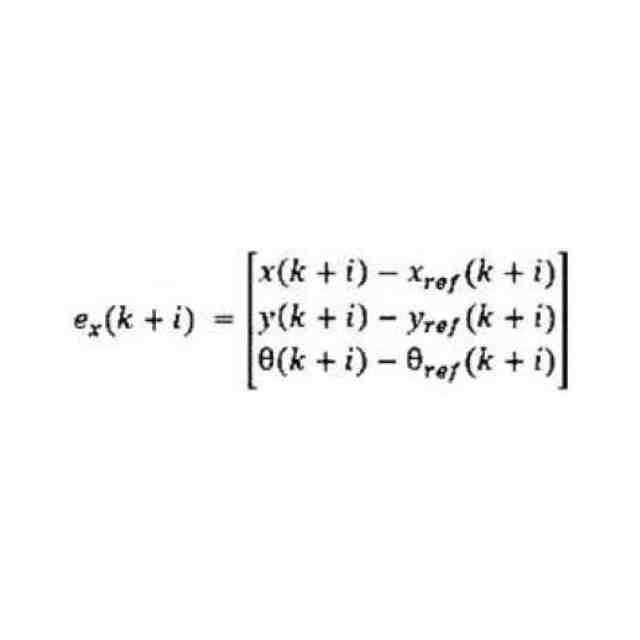
図6は、障害物項の計算を説明するための図である。
図7は、安全領域を考慮した障害物項の計算を説明するための図である。
図8は、第1実施形態に係る走行制御装置による走行制御処理の流れを示すフローチャートである。
図9は、第1実施形態に係る動作計画処理の流れを示すフローチャートである。
図10は、車両の形状を円で表現する場合のイメージの一例である。
図11は、目的関数及び制約による候補状態のイメージ図である。
図12は、障害物判定のイメージ図である。
図13は、安全領域を考慮した障害物判定のイメージ図である。
図14は、第2実施形態に係る走行制御装置30Bによる走行制御処理の流れを示すフローチャートである。
図15は、第2実施形態に係る動作計画処理の流れを示すフローチャートである。
図16は、車両の形状を複数円で表現する場合の手法を説明するための図である。
図17は、車両の形状を複数円で表現する場合の手法を説明するための図である。
図18は、変形例における候補状態の設定態様を説明するための図である。
図19は、DWAでv、ωを求める場合のイメージ図である。
図20は、MPCでv、ωを求める場合のイメージ図である。
図21は、車両の形状を複数円で表現して本実施形態の手法を適用した実験例である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
オムロン株式会社
電磁継電器
1か月前
オムロン株式会社
発光エンブレム
1か月前
オムロン株式会社
センサシステム
22日前
オムロン株式会社
サーボドライバ
1か月前
オムロン株式会社
センサシステム
22日前
オムロン株式会社
センサシステム
22日前
オムロン株式会社
システム及び方法
22日前
オムロン株式会社
システム及び方法
22日前
オムロン株式会社
パワーコンディショナ
1か月前
オムロン株式会社
電力システム及び制御装置
1か月前
オムロン株式会社
監視装置、監視方法及びプログラム
26日前
オムロン株式会社
情報処理システムおよび情報処理方法
1か月前
オムロン株式会社
制御装置、制御方法、及び制御プログラム
1か月前
オムロン株式会社
画像処理装置、画像処理方法及びプログラム
1か月前
オムロン株式会社
処理装置、処理方法、および処理プログラム
1か月前
オムロン株式会社
管理システム、管理方法及び管理プログラム
26日前
オムロン株式会社
処理装置、処理方法、および処理プログラム
1か月前
オムロン株式会社
変換装置、変換方法、および、変換プログラム
12日前
オムロン株式会社
モデル生成方法、推論プログラム及び推論装置
1か月前
オムロン株式会社
制御装置、情報処理方法および情報処理プログラム
1か月前
オムロン株式会社
情報処理装置、情報処理方法及び情報処理プログラム
22日前
オムロン株式会社
感震センサおよび地震検知方法、地震検知プログラム
22日前
オムロン株式会社
物体検出装置、物体検出方法、および制御プログラム
1か月前
オムロン株式会社
感震センサおよび地震検知方法、地震検知プログラム
22日前
オムロン株式会社
感震センサおよび地震検知方法、地震検知プログラム
28日前
オムロン株式会社
感震センサおよび地震検知方法、地震検知プログラム
23日前
オムロン株式会社
感震センサおよび地震検知方法、地震検知プログラム
22日前
オムロン株式会社
情報処理装置、情報処理方法及び情報処理プログラム
22日前
オムロン株式会社
雨滴検出装置、雨滴検出方法および雨滴検出プログラム
1か月前
オムロン株式会社
オドメトリパラメータ較正装置、方法、及びプログラム
1か月前
オムロン株式会社
走行制御装置、走行制御方法、及び走行制御プログラム
1か月前
オムロン株式会社
表示制御装置、表示制御方法および表示制御プログラム
1か月前
オムロン株式会社
混雑制御システム、混雑制御方法及び混雑制御プログラム
23日前
オムロン株式会社
設計支援方法、設計支援装置、プログラム、及び記録媒体
1か月前
オムロン株式会社
信頼度マップ作成方法、自己位置決定方法、装置、及びプログラム
1か月前
オムロン株式会社
入出場管理システム、入出場管理方法、及び入出場管理プログラム
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ