TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025154749
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024057926
出願日
2024-03-29
発明の名称
制御装置、制御方法、及び制御プログラム
出願人
オムロン株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
G05D
1/622 20240101AFI20251002BHJP(制御;調整)
要約
【課題】停止軌道を考慮しつつ移動ロボットを移動させる際に、移動ロボットを目的地へより短時間で到達させる。
【解決手段】制御装置は、移動ロボットの計画軌道の候補である第1軌道候補を複数生成する。制御装置は、複数の第1軌道候補の各々について、少なくとも2つ以上の将来時刻における第1軌道候補上の移動ロボットの位置を始点とする軌道であって、移動ロボットを停止させる際の軌道である停止軌道を生成する。制御装置は、複数の第1軌道候補の各々について、少なくとも2つ以上の将来時刻における停止軌道のうち、少なくとも1つの停止軌道が所定領域へ進入しないことを表す場合に、第1軌道候補を第2軌道候補として設定する。制御装置は、複数の第2軌道候補から、移動ロボットの計画軌道を選択する。制御装置は、選択された計画軌道に沿って移動ロボットを移動させるように制御する。
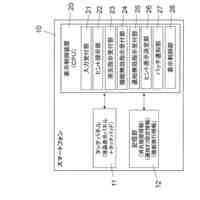
【選択図】図1
特許請求の範囲
【請求項1】
移動ロボットの計画軌道の候補である第1軌道候補を複数生成する軌道生成部と、
複数の第1軌道候補の各々について、少なくとも2つ以上の将来時刻における前記第1軌道候補上の前記移動ロボットの位置を始点とする軌道であって、前記移動ロボットを停止させる際の軌道である停止軌道を生成する停止軌道生成部と、
複数の前記第1軌道候補の各々について、少なくとも2つ以上の将来時刻における前記停止軌道のうち、少なくとも1つの前記停止軌道が所定領域へ進入しないことを表す場合に、前記第1軌道候補を第2軌道候補として設定し、複数の第2軌道候補から、前記移動ロボットの計画軌道を選択する選択部と、
選択された前記計画軌道に沿って前記移動ロボットを移動させるように制御する制御部と、
を備える制御装置。
続きを表示(約 1,200 文字)
【請求項2】
前記軌道生成部は、前記第1軌道候補を生成する際に、前記移動ロボットを移動させる駆動部の加減速の上下限に基づいて、各時刻の前記移動ロボットの加速度及び角加速度をランダムに複数生成し、生成された複数の前記加速度及び前記角加速度の各々について、前記加速度及び前記角加速度から決定される前記第1軌道候補を生成する、
請求項1に記載の制御装置。
【請求項3】
前記選択部は、複数の前記第2軌道候補のうち、前記第2軌道候補が表す軌道の終端から前記移動ロボットの目的地まで前記移動ロボットが移動する際に要する推定時間が最小である前記第2軌道候補を、前記移動ロボットの計画軌道として選択する、
請求項1又は請求項2に記載の制御装置。
【請求項4】
前記選択部は、前記推定時間を計算する際に、前記移動ロボットが前記所定領域に近いほど前記移動ロボットの速度が小さくなるように、かつ前記移動ロボットが前記所定領域から遠いほど前記移動ロボットの速度が大きくなるようにして、前記推定時間を計算する、
請求項3に記載の制御装置。
【請求項5】
移動ロボットの計画軌道の候補である第1軌道候補を複数生成し、
複数の第1軌道候補の各々について、少なくとも2つ以上の将来時刻における前記第1軌道候補上の前記移動ロボットの位置を始点とする軌道であって、前記移動ロボットを停止させる際の軌道である停止軌道を生成し、
複数の前記第1軌道候補の各々について、少なくとも2つ以上の将来時刻における前記停止軌道のうち、少なくとも1つの前記停止軌道が所定領域へ進入しないことを表す場合に、前記第1軌道候補を第2軌道候補として設定し、複数の第2軌道候補から、前記移動ロボットの計画軌道を選択し、
選択された前記計画軌道に沿って前記移動ロボットを移動させるように制御する、
処理をコンピュータが実行する制御方法。
【請求項6】
移動ロボットの計画軌道の候補である第1軌道候補を複数生成し、
複数の第1軌道候補の各々について、少なくとも2つ以上の将来時刻における前記第1軌道候補上の前記移動ロボットの位置を始点とする軌道であって、前記移動ロボットを停止させる際の軌道である停止軌道を生成し、
複数の前記第1軌道候補の各々について、少なくとも2つ以上の将来時刻における前記停止軌道のうち、少なくとも1つの前記停止軌道が所定領域へ進入しないことを表す場合に、前記第1軌道候補を第2軌道候補として設定し、複数の第2軌道候補から、前記移動ロボットの計画軌道を選択し、
選択された前記計画軌道に沿って前記移動ロボットを移動させるように制御する、
処理をコンピュータに実行させるための制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御装置、制御方法、及び制御プログラムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来、移動ロボットを制御する技術が知られている(例えば、非特許文献1を参照)。非特許文献1に開示されている技術は、システムに障害が発生した場合に、移動ロボットが障害物等へ衝突しないような停止軌道を考慮しつつ移動ロボットを移動させることができる。
【先行技術文献】
【非特許文献】
【0003】
O. Brock and O. Khatib, “High-speed navigation using the global dynamic window approach,” in Proceedings 1999 ieee international conference on robotics and automation (Cat. No. 99CH36288C), vol. 1. IEEE, 1999, pp. 341-346.
【発明の概要】
【発明が解決しようとする課題】
【0004】
非特許文献1に開示されている技術は、現時刻tよりも1時刻未来の時刻t+1において、移動ロボットが障害物等へ衝突しないような停止軌道を探索する。そして、非特許文献1に開示されている技術は、移動ロボットを実際に移動させる計画軌道と移動ロボットが障害物等へ衝突しないような停止軌道とを含む軌道が実現されるように、移動ロボットを制御する。なお、停止軌道は計画軌道に紐づけられており、移動ロボットが障害物等へ衝突しないような停止軌道が実現される計画軌道候補から、移動ロボットの実際の計画軌道が選択される。
【0005】
しかし、非特許文献1に開示されている技術は、時刻t+1における停止軌道しか探索していない。このような場合には、停止軌道に紐づけられる計画軌道候補のバリエーションが制限されてしまい、選択可能な計画軌道候補が減少してしまう。これにより、多様な計画軌道候補から計画軌道を選択することができなくなり、結果として、移動ロボットの目的地への到達が遅い計画軌道しか得られない場合がある。そのため、非特許文献1に開示されている技術を利用した場合には、移動ロボットの目的地への到達が遅くなってしまう場合がある、という課題がある。
【0006】
本開示は、上記の点に鑑みてなされたものであり、停止軌道を考慮しつつ移動ロボットを移動させる際に、移動ロボットを目的地へより短時間で到達させることを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本開示に係る制御装置は、移動ロボットの計画軌道の候補である第1軌道候補を複数生成する軌道生成部と、複数の第1軌道候補の各々について、少なくとも2つ以上の将来時刻における前記第1軌道候補上の前記移動ロボットの位置を始点とする軌道であって、前記移動ロボットを停止させる際の軌道である停止軌道を生成する停止軌道生成部と、複数の前記第1軌道候補の各々について、少なくとも2つ以上の将来時刻における前記停止軌道のうち、少なくとも1つの前記停止軌道が所定領域へ進入しないことを表す場合に、前記第1軌道候補を第2軌道候補として設定し、複数の第2軌道候補から、前記移動ロボットの計画軌道を選択する選択部と、選択された前記計画軌道に沿って前記移動ロボットを移動させるように制御する制御部と、を備える制御装置である。
【0008】
また、本開示の制御方法は、移動ロボットの計画軌道の候補である第1軌道候補を複数生成し、複数の第1軌道候補の各々について、少なくとも2つ以上の将来時刻における前記第1軌道候補上の前記移動ロボットの位置を始点とする軌道であって、前記移動ロボットを停止させる際の軌道である停止軌道を生成し、複数の前記第1軌道候補の各々について、少なくとも2つ以上の将来時刻における前記停止軌道のうち、少なくとも1つの前記停止軌道が所定領域へ進入しないことを表す場合に、前記第1軌道候補を第2軌道候補として設定し、複数の第2軌道候補から、前記移動ロボットの計画軌道を選択し、選択された前記計画軌道に沿って前記移動ロボットを移動させるように制御する、処理をコンピュータが実行する制御方法である。
【0009】
また、本開示の制御プログラムは、移動ロボットの計画軌道の候補である第1軌道候補を複数生成し、複数の第1軌道候補の各々について、少なくとも2つ以上の将来時刻における前記第1軌道候補上の前記移動ロボットの位置を始点とする軌道であって、前記移動ロボットを停止させる際の軌道である停止軌道を生成し、複数の前記第1軌道候補の各々について、少なくとも2つ以上の将来時刻における前記停止軌道のうち、少なくとも1つの前記停止軌道が所定領域へ進入しないことを表す場合に、前記第1軌道候補を第2軌道候補として設定し、複数の第2軌道候補から、前記移動ロボットの計画軌道を選択し、選択された前記計画軌道に沿って前記移動ロボットを移動させるように制御する、処理をコンピュータに実行させるための制御プログラムである。
【発明の効果】
【0010】
本開示の制御装置、制御方法、及び制御プログラムによれば、停止軌道を考慮しつつ移動ロボットを移動させる際に、移動ロボットを目的地へより短時間で到達させることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
オムロン株式会社
電磁継電器
1か月前
オムロン株式会社
センサシステム
1か月前
オムロン株式会社
センサシステム
1か月前
オムロン株式会社
発光エンブレム
1か月前
オムロン株式会社
センサシステム
1か月前
オムロン株式会社
サーボドライバ
1か月前
オムロン株式会社
システム及び方法
1か月前
オムロン株式会社
システム及び方法
1か月前
オムロン株式会社
パワーコンディショナ
1か月前
オムロン株式会社
パワーコンディショナ
1日前
オムロン株式会社
電力システム及び制御装置
1か月前
オムロン株式会社
検出システム及び検出方法
1日前
オムロン株式会社
監視装置、監視方法及びプログラム
1か月前
オムロン株式会社
情報処理システムおよび情報処理方法
1か月前
オムロン株式会社
制御装置、制御方法、及び制御プログラム
1か月前
オムロン株式会社
処理装置、処理方法、および処理プログラム
1か月前
オムロン株式会社
管理システム、管理方法及び管理プログラム
1か月前
オムロン株式会社
処理装置、処理方法、および処理プログラム
1か月前
オムロン株式会社
画像処理装置、画像処理方法及びプログラム
1か月前
オムロン株式会社
モデル生成方法、推論プログラム及び推論装置
1か月前
オムロン株式会社
サポート装置、サポート方法およびプログラム
1日前
オムロン株式会社
サポート装置、サポート方法およびプログラム
1日前
オムロン株式会社
変換装置、変換方法、および、変換プログラム
22日前
オムロン株式会社
制御装置、情報処理方法および情報処理プログラム
1か月前
オムロン株式会社
物体検出装置、物体検出方法、および制御プログラム
1か月前
オムロン株式会社
感震センサおよび地震検知方法、地震検知プログラム
1か月前
オムロン株式会社
感震センサおよび地震検知方法、地震検知プログラム
1か月前
オムロン株式会社
情報処理装置、情報処理方法及び情報処理プログラム
1か月前
オムロン株式会社
感震センサおよび地震検知方法、地震検知プログラム
1か月前
オムロン株式会社
情報処理装置、情報処理方法及び情報処理プログラム
1か月前
オムロン株式会社
感震センサおよび地震検知方法、地震検知プログラム
1か月前
オムロン株式会社
感震センサおよび地震検知方法、地震検知プログラム
1か月前
オムロン株式会社
表示制御装置、表示制御方法および表示制御プログラム
1か月前
オムロン株式会社
オドメトリパラメータ較正装置、方法、及びプログラム
1か月前
オムロン株式会社
設計支援方法、設計支援装置、プログラム、及び記録媒体
1か月前
オムロン株式会社
混雑制御システム、混雑制御方法及び混雑制御プログラム
1か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ