TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025162831
公報種別
公開特許公報(A)
公開日
2025-10-28
出願番号
2024066281
出願日
2024-04-16
発明の名称
感震センサおよび地震検知方法、地震検知プログラム
出願人
オムロン株式会社
代理人
個人
主分類
G01V
1/01 20240101AFI20251021BHJP(測定;試験)
要約
【課題】検出された振動が地震かノイズかを正確に判定することが可能な感震センサおよび地震検知方法、地震検知プログラムを提供する。
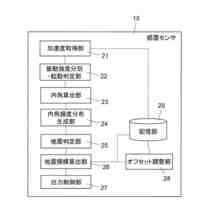
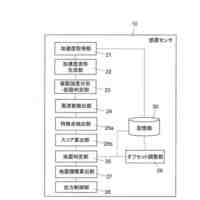
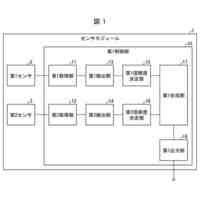
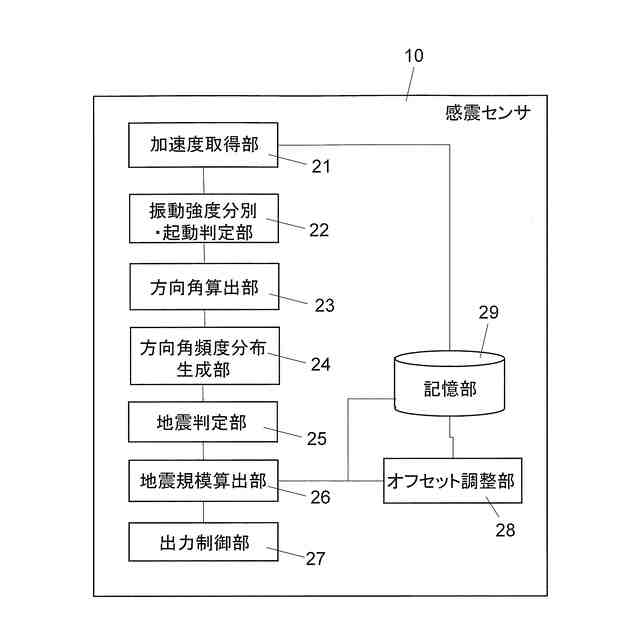
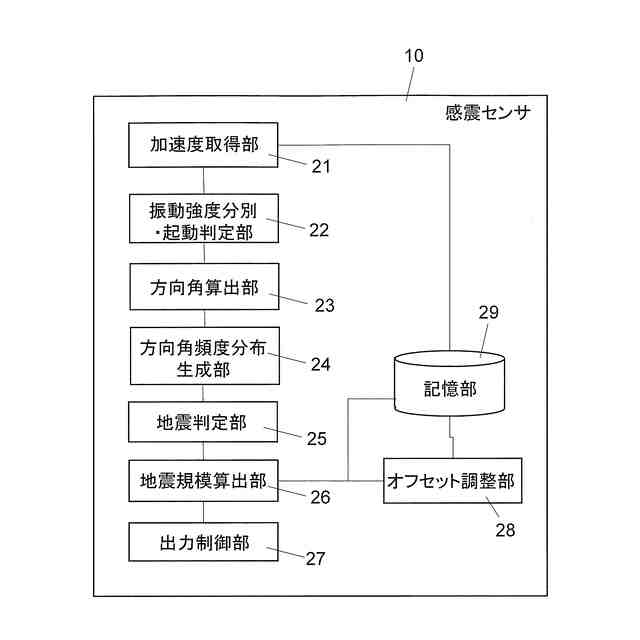
【解決手段】感震センサ10は、図2に示すように、加速度取得部21と、方向角算出部23と、方向角頻度分布生成部24と、地震判定部25と、を備えている。加速度取得部21は、振動を検出し振動の加速度を取得する。方向角算出部23は、加速度取得部21において取得された加速度について、所定の座標平面上における原点を基準にした各加速度のベクトルがなす角度を算出する。方向角頻度分布生成部24は、方向角算出部23において算出された角度の頻度分布を生成する。地震判定部25は、方向角頻度分布生成部24において作成された角度の頻度分布に基づいて、振動が地震であるか否かを判定する。
【選択図】図2
特許請求の範囲
【請求項1】
振動を検出し前記振動の加速度を取得する加速度取得部と、
前記加速度取得部において取得された前記加速度について、所定の座標平面上における原点を基準にした各加速度のベクトルがなす角度を算出する角度算出部と、
前記角度算出部において算出された角度の頻度分布を生成する角度頻度分布生成部と、
前記角度頻度分布生成部において作成された前記角度の頻度分布に基づいて、前記振動が地震であるか否かを判定する地震判定部と、
を備えている感震センサ。
続きを表示(約 1,100 文字)
【請求項2】
前記地震判定部は、前記角度の頻度が全体として同程度である場合には、前記振動を地震と判定する、
請求項1に記載の感震センサ。
【請求項3】
前記地震判定部は、前記角度の頻度に角度ごとに偏りがある場合には、前記振動を地震ではないと判定する、
請求項1または2に記載の感震センサ。
【請求項4】
前記地震判定部は、前記角度頻度分布生成部において作成された前記角度の頻度の平均値と標準偏差とから前記角度の頻度の変動係数を算出し、前記変動係数が所定の閾値よりも小さい場合に、前記振動を地震と判定する、
請求項1または2に記載の感震センサ。
【請求項5】
前記地震判定部は、前記角度頻度分布生成部において生成された前記頻度分布の平均値、中央値および最頻値のいずれかを用いて前記振動が地震であるか否かを判定する、
請求項1または2に記載の感震センサ。
【請求項6】
前記地震判定部は、前記角度頻度分布生成部において生成された前記頻度分布の標準偏差、分散、歪度および尖度のいずれかを用いて前記振動が地震であるか否かを判定する、
請求項1または2に記載の感震センサ。
【請求項7】
前記地震判定部において地震であると判定された場合に、所定の震度相当以上の地震であるか否かを判定する地震規模算出部を、さらに備えている、
請求項1または2に記載の感震センサ。
【請求項8】
前記加速度取得部における取得結果から前記振動の強度を算出し、前記振動の強度が所定の大きさ以上である場合に、省電力モードから、前記省電力モードよりも消費電力の大きい測定モードへ移行する起動判定部を、さらに備えている、
請求項1または2に記載の感震センサ。
【請求項9】
前記地震判定部において、地震であると判定された場合、前記所定の信号を出力する出力制御部を、さらに備えている、
請求項1または2に記載の感震センサ。
【請求項10】
振動を検出し前記振動の加速度を取得する加速度取得ステップと、
前記加速度取得ステップにおいて取得された前記加速度について、所定の座標平面上における原点を基準にした各加速度のベクトルがなす角度を算出する角度算出ステップと、
前記角度算出ステップにおいて算出された角度の頻度分布を生成する角度頻度分布生成ステップと、
前記角度頻度分布生成ステップにおいて作成された前記角度の頻度分布に基づいて、前記振動が地震であるか否かを判定する地震判定ステップと、
を備えている地震検知方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、地震動を検出する感震センサおよび地震検知方法、地震検知プログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
近年、ガスメータ、電力メータ、分電盤、コンセント等に内蔵されており、所定値以上の大きさ(例えば、震度5強以上)の地震動を検出した場合に、ガス、電気等の供給を遮断するための遮断信号を出力する感震センサが用いられている。
例えば、特許文献1には、地震処理期間において判定期間の後の地震処理期間において地震の規模を示す指標値が閾値以上の場合に遮断信号を出力する感震センサであって、地震処理期間において測定された加速度に基づいて地震発生を判定する継続地震判定部と、継続地震判定部が地震は発生していないと判定した場合に、指標値に拘らず遮断信号が出力されないようにする遮断判定部と、を備えた感震センサについて開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第6465257号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来の感震センサでは、以下に示すような問題点を有している。
すなわち、上記公報に開示された感震センサでは、加速度センサによって計測された加速度の周波数解析の際に、加速度センサが持つ各軸(例えば、XY軸)におけるそれぞれの周波数を算出している。このため、両軸(例えば、X軸とY軸)における振動特性を考慮した振動の解析を行うことは難しく、正確に地震判定を実施することが困難であった。
【0005】
本発明の課題は、検出された振動が地震かノイズかを正確に判定することが可能な感震センサおよび地震検知方法、地震検知プログラムを提供することにある。
【課題を解決するための手段】
【0006】
第1の発明に係る感震センサは、加速度取得部と、角度算出部と、角度頻度分布生成部と、地震判定部と、を備えている。加速度取得部は、振動を検出し振動の加速度を取得する。角度算出部は、加速度取得部において取得された加速度について、所定の座標平面上における原点を基準にした各加速度のベクトルがなす角度を算出する。角度頻度分布生成部は、角度算出部において算出された角度の頻度分布を生成する。地震判定部は、角度頻度分布生成部において作成された角度の頻度分布に基づいて、振動が地震であるか否かを判定する。
【0007】
ここでは、検出された振動の加速度の座標平面上における原点を基準とした加速度ベクトルがなす角度を算出し、その角度の頻度分布に基づいて、振動が地震であるか否かを判定する。
ここで、所定の座標平面とは、例えば、加速度を計測する加速度センサが持つ3軸(X軸、Y軸、Z軸)のうちの、XY平面、XZ平面あるいはYZ平面、あるいは、例えば、加速度を計測する加速度センサが持つ3軸の加速度から非重力方向における加速度を抽出して得られる水平面、を意味している。
【0008】
また、所定の座標平面における原点を基準にした加速度ベクトルがなす角度とは、例えば、座標平面(XY平面)において加速度ベクトルの始点を原点に合わせた状態で、X軸に対する加速度ベクトルがなす角度を意味している。
通常、検出された振動が地震である場合には、略水平面上において様々な方向に振動する等の特徴がある。
【0009】
そこで、本感震センサでは、所定の座標平面上における加速度ベクトルの向き(方向角)を算出し、その頻度分布を生成して、角度ごとの頻度の偏りに基づいて、地震判定を行う。
これにより、地震による振動の特徴である、あらゆる方向に加速度ベクトルが向くことを角度の頻度分布を用いて検出することで、当該振動を地震であるか否かを判定することができる。
この結果、検出された振動が地震かノイズかを正確に判定することができる。
【0010】
第2の発明に係る感震センサは、第1の発明に係る感震センサであって、地震判定部は、角度の頻度が全体として同程度である場合には、振動を地震と判定する。
これにより、生成された角度の頻度分布から、あらゆる角度を向く加速度ベクトルが全体として同程度に検出された場合には、地震による振動の特徴と合致すると判断し、当該振動を地震と判定することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
オムロン株式会社
電磁継電器
1か月前
オムロン株式会社
センサシステム
24日前
オムロン株式会社
サーボドライバ
1か月前
オムロン株式会社
発光エンブレム
1か月前
オムロン株式会社
センサシステム
24日前
オムロン株式会社
センサシステム
24日前
オムロン株式会社
システム及び方法
24日前
オムロン株式会社
システム及び方法
24日前
オムロン株式会社
パワーコンディショナ
1か月前
オムロン株式会社
電力システム及び制御装置
1か月前
オムロン株式会社
監視装置、監視方法及びプログラム
28日前
オムロン株式会社
情報処理システムおよび情報処理方法
1か月前
オムロン株式会社
制御装置、制御方法、及び制御プログラム
1か月前
オムロン株式会社
処理装置、処理方法、および処理プログラム
1か月前
オムロン株式会社
処理装置、処理方法、および処理プログラム
1か月前
オムロン株式会社
管理システム、管理方法及び管理プログラム
28日前
オムロン株式会社
画像処理装置、画像処理方法及びプログラム
1か月前
オムロン株式会社
モデル生成方法、推論プログラム及び推論装置
1か月前
オムロン株式会社
変換装置、変換方法、および、変換プログラム
14日前
オムロン株式会社
制御装置、情報処理方法および情報処理プログラム
1か月前
オムロン株式会社
感震センサおよび地震検知方法、地震検知プログラム
25日前
オムロン株式会社
情報処理装置、情報処理方法及び情報処理プログラム
24日前
オムロン株式会社
感震センサおよび地震検知方法、地震検知プログラム
1か月前
オムロン株式会社
感震センサおよび地震検知方法、地震検知プログラム
24日前
オムロン株式会社
情報処理装置、情報処理方法及び情報処理プログラム
24日前
オムロン株式会社
感震センサおよび地震検知方法、地震検知プログラム
24日前
オムロン株式会社
感震センサおよび地震検知方法、地震検知プログラム
24日前
オムロン株式会社
物体検出装置、物体検出方法、および制御プログラム
1か月前
オムロン株式会社
雨滴検出装置、雨滴検出方法および雨滴検出プログラム
1か月前
オムロン株式会社
走行制御装置、走行制御方法、及び走行制御プログラム
1か月前
オムロン株式会社
オドメトリパラメータ較正装置、方法、及びプログラム
1か月前
オムロン株式会社
表示制御装置、表示制御方法および表示制御プログラム
1か月前
オムロン株式会社
設計支援方法、設計支援装置、プログラム、及び記録媒体
1か月前
オムロン株式会社
混雑制御システム、混雑制御方法及び混雑制御プログラム
25日前
オムロン株式会社
信頼度マップ作成方法、自己位置決定方法、装置、及びプログラム
1か月前
オムロン株式会社
入出場管理システム、入出場管理方法、及び入出場管理プログラム
1か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ