TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025153506
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024056023
出願日
2024-03-29
発明の名称
追跡支援装置、追跡支援方法及びプログラム
出願人
日本電気株式会社
代理人
個人
,
個人
主分類
G08G
5/00 20250101AFI20251002BHJP(信号)
要約
【課題】 逃走する車両の追跡の失敗率を抑制できる追跡支援装置等を提供する。
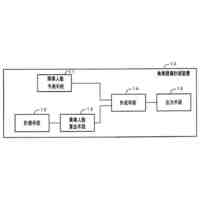
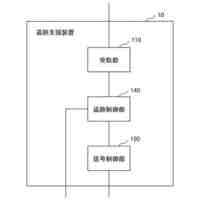
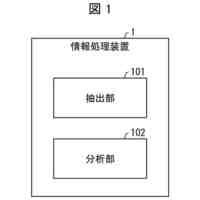
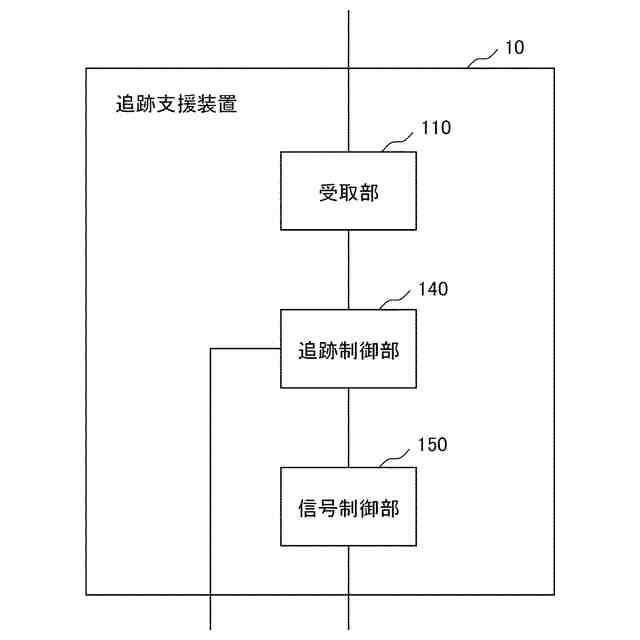
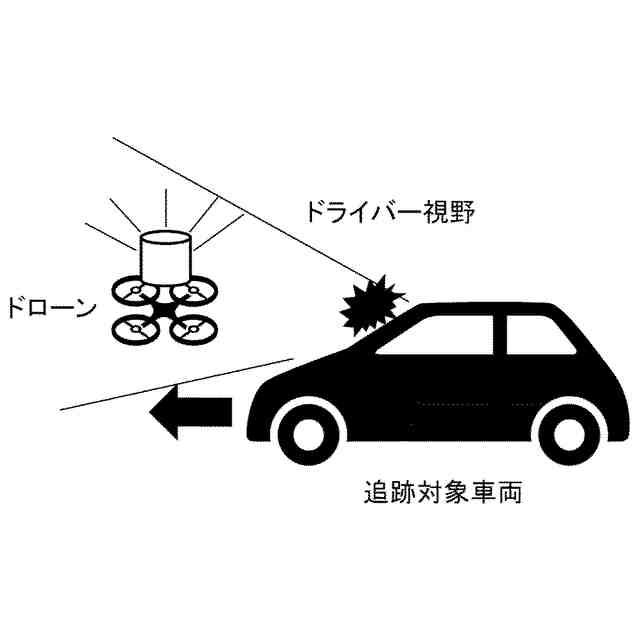
【解決手段】 本開示の一態様に係る追跡支援装置は、車両を追跡する飛翔体から前記飛翔体の位置の情報と前記飛翔体に搭載された撮像装置によって撮像された撮像画像とを受け取る受取手段と、前記位置の情報と前記撮像画像とを使用して、前記飛翔体が前記車両の前方を飛行しながら前記車両を追跡するように前記飛翔体を制御する追跡制御手段と、前記飛翔体が前記車両の前方を飛行している間、前記飛翔体が前記車両に対して信号を発するように前記飛翔体を制御する信号制御手段と、を備える。
【選択図】 図1
特許請求の範囲
【請求項1】
車両を追跡する飛翔体から前記飛翔体の位置の情報と前記飛翔体に搭載された撮像装置によって撮像された撮像画像とを受け取る受取手段と、
前記位置の情報と前記撮像画像とを使用して、前記飛翔体が前記車両の前方を飛行しながら前記車両を追跡するように前記飛翔体を制御する追跡制御手段と、
前記飛翔体が前記車両の前方を飛行している間、前記飛翔体が前記車両に対して信号を発するように前記飛翔体を制御する信号制御手段と、
を備える追跡支援装置。
続きを表示(約 1,900 文字)
【請求項2】
前記追跡制御手段は、前記撮像画像における前記車両のフロントウィンドウの領域の画像を使用して、前記飛翔体が前記車両の運転者から視認され得る範囲を飛行するように、前記飛翔体を制御する
請求項1に記載の追跡支援装置。
【請求項3】
前記撮像画像における前記車両の運転者の領域から、前記運転者の視線を推定する視線推定手段
をさらに備え、
前記追跡制御手段は、前記飛翔体が前記視線上に位置するように、前記飛翔体を制御する
請求項1又は2に記載の追跡支援装置。
【請求項4】
前記飛翔体は、赤色灯を搭載し、
前記信号制御手段は、前記飛翔体が、前記赤色灯の光を、前記信号として前記車両に対して照射するように前記飛翔体を制御する
請求項1又は2に記載の追跡支援装置。
【請求項5】
前記飛翔体は、表示装置を搭載し、
前記信号制御手段は、前記表示装置が、文字列が表示された画面を、前記信号として前記車両に向けて表示するように前記飛翔体を制御する
請求項1又は2に記載の追跡支援装置。
【請求項6】
前記飛翔体は、音響発生装置を搭載し、
前記信号制御手段は、前記飛翔体が前記音響発生装置による音を、前記信号として前記車両に対して発するように前記飛翔体を制御する
請求項1又は2に記載の追跡支援装置。
【請求項7】
前記追跡制御手段は、
前記飛翔体の少なくとも1つが前方飛翔体として前記車両の前方を飛行しながら前記車両を追跡し、前記飛翔体の他の少なくとも1つが後方飛翔体として前記前方飛翔体の後方を飛行しながら前記車両を追跡するように前記前方飛翔体と前記後方飛翔体とを制御し、
前記車両が走行方向を変更した場合、前記車両の前記走行方向の変更の前に前記後方飛翔体として飛行していた前記飛翔体の少なくとも1つが新しい前記前方飛翔体として新しい前記前方飛翔体の前方を飛行しながら前記車両を追跡し、前記車両の前記走行方向の変更の前に前記前方飛翔体として飛行していた前記飛翔体が新しい前記後方飛翔体として前記車両の後方を飛行しながら前記車両を追跡するように、前記飛翔体を制御する
請求項1又は2に記載の追跡支援装置。
【請求項8】
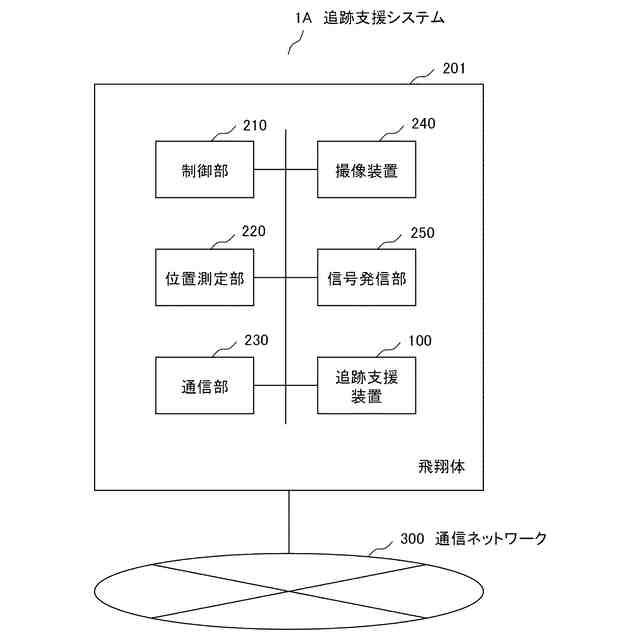
前記飛翔体は、前記車両の前方を飛行しながら前記車両を追跡する前方飛翔体と、前記車両の上方を飛行しながら前記車両を追跡する上方飛翔体と、を含み、
前記受取手段は、
前記上方飛翔体に搭載された前記撮像装置が前記車両を撮像した前記撮像画像である上方撮像画像と、前記上方飛翔体が測定した前記位置とを、前記上方飛翔体から受け取り、
前記前方飛翔体に搭載された前記撮像装置が前記車両のフロントウィンドウが撮像されるように前記車両を撮像した前記撮像画像である前方撮像画像を前記前方飛翔体から受け取り、
前記追跡制御手段は、
前記上方飛翔体から取得された前記位置を前記車両の位置として使用し、前記前方撮像画像を使用して、前記前方飛翔体が、前記車両の運転者から視認され得るように前記車両の前方を飛行しながら前記車両を追跡するように、前記前方飛翔体を制御し、
前記上方飛翔体から取得された前記位置を前記車両の位置として使用し、前記上方撮像画像を使用して、前記上方飛翔体が、前記車両の上方を飛行しながら前記車両を追跡するように前記上方飛翔体を制御する
請求項1又は2に記載の追跡支援装置。
【請求項9】
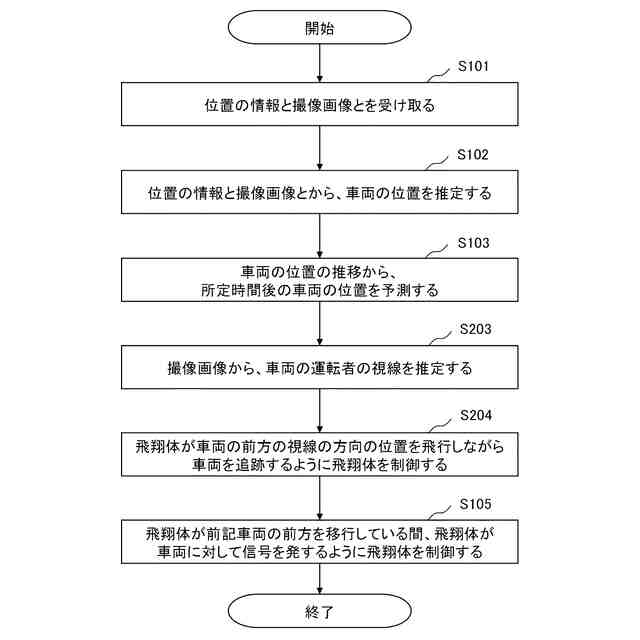
車両を追跡する飛翔体から前記飛翔体の位置の情報と前記飛翔体に搭載された撮像装置によって撮像された撮像画像とを受け取り、
前記位置の情報と前記撮像画像とを使用して、前記飛翔体が前記車両の前方を飛行しながら前記車両を追跡するように前記飛翔体を制御し、
前記飛翔体が前記車両の前方を飛行している間、前記飛翔体が前記車両に対して信号を発するように前記飛翔体を制御する、
追跡支援方法。
【請求項10】
車両を追跡する飛翔体から前記飛翔体の位置の情報と前記飛翔体に搭載された撮像装置によって撮像された撮像画像とを受け取る受取処理と、
前記位置の情報と前記撮像画像とを使用して、前記飛翔体が前記車両の前方を飛行しながら前記車両を追跡するように前記飛翔体を制御する追跡制御処理と、
前記飛翔体が前記車両の前方を飛行している間、前記飛翔体が前記車両に対して信号を発するように前記飛翔体を制御する信号制御処理と、
をコンピュータに実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、追跡支援装置、追跡支援方法及びプログラムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
事故・ひき逃げ等を起こした逃走車両の追跡を、固定カメラを使用して行うのには限界がある。逃走車両を直接追跡できるパトカー(パトロールカー)や白バイ(白塗りのオートバイ、交通取締用自動二輪車)が現場に配置されている可能性は高くない。
【0003】
特許文献1には、車両の位置と車両の進行方向前方の飛行目標位置とを無人飛行体に送信し、無人飛行体が車両の進行方向前方を飛行するように制御する運転支援装置が記載されている。この運転支援装置は、無人飛行体に搭載された撮像装置が撮像した車両の進行方向前方の画像を車両の乗員に提示する。
【先行技術文献】
【特許文献】
【0004】
特開2017-21755号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1の技術では、無人飛行体が走行する車両の進行方向前方を飛行できる。しかし、特許文献1の技術では、無人飛行体は、車両の位置と無人飛行体の飛行目標位置とを受け取る必要がある。一般に、逃走する車両は、その車両を追跡する無人飛行体に、車両の位置と飛行目標位置とを提供しない。特許文献1の技術は、逃走する車両の追跡に使用できない。
【0006】
本開示の目的の1つは、逃走する車両の追跡の失敗率を抑制できる追跡支援装置、追跡支援方法及びプログラムを提供することである。
【課題を解決するための手段】
【0007】
本開示の一態様に係る追跡支援装置は、車両を追跡する飛翔体から前記飛翔体の位置の情報と前記飛翔体に搭載された撮像装置によって撮像された撮像画像とを受け取る受取手段と、前記位置の情報と前記撮像画像とを使用して、前記飛翔体が前記車両の前方を飛行しながら前記車両を追跡するように前記飛翔体を制御する追跡制御手段と、前記飛翔体が前記車両の前方を飛行している間、前記飛翔体が前記車両に対して信号を発するように前記飛翔体を制御する信号制御手段と、を備える。
【0008】
本開示の一態様に係る追跡支援方法は、車両を追跡する飛翔体から前記飛翔体の位置の情報と前記飛翔体に搭載された撮像装置によって撮像された撮像画像とを受け取り、前記位置の情報と前記撮像画像とを使用して、前記飛翔体が前記車両の前方を飛行しながら前記車両を追跡するように前記飛翔体を制御し、前記飛翔体が前記車両の前方を飛行している間、前記飛翔体が前記車両に対して信号を発するように前記飛翔体を制御する。
【0009】
本開示の一態様に係るプログラムは、車両を追跡する飛翔体から前記飛翔体の位置の情報と前記飛翔体に搭載された撮像装置によって撮像された撮像画像とを受け取る受取処理と、前記位置の情報と前記撮像画像とを使用して、前記飛翔体が前記車両の前方を飛行しながら前記車両を追跡するように前記飛翔体を制御する追跡制御処理と、前記飛翔体が前記車両の前方を飛行している間、前記飛翔体が前記車両に対して信号を発するように前記飛翔体を制御する信号制御処理と、をコンピュータに実行させる。
【発明の効果】
【0010】
本開示には、逃走する車両の追跡の失敗率を抑制できるという効果がある。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日本電気株式会社
監視装置
1か月前
日本電気株式会社
監視装置
1か月前
日本電気株式会社
管理装置
1か月前
日本電気株式会社
異常検知装置
1か月前
日本電気株式会社
光モジュール
26日前
日本電気株式会社
海底分岐装置
1か月前
日本電気株式会社
光集積回路素子
1か月前
日本電気株式会社
推論装置および推論方法
18日前
日本電気株式会社
ラインカード及びイジェクタ
1か月前
日本電気株式会社
考査装置、考査方法、プログラム
19日前
日本電気株式会社
時刻維持装置および時刻維持方法
17日前
日本電気株式会社
考査装置、考査方法、プログラム
19日前
日本電気株式会社
交渉装置、交渉方法及びプログラム
3日前
日本電気株式会社
交渉装置、交渉方法及びプログラム
26日前
日本電気株式会社
監視装置、監視方法、及びプログラム
16日前
日本電気株式会社
端末、端末の制御方法及びプログラム
1か月前
日本電気株式会社
レコメンド装置およびレコメンド方法
1か月前
日本電気株式会社
安否確認支援装置、方法及びプログラム
1か月前
日本電気株式会社
乗車誘導計画装置および乗車誘導計画方法
9日前
日本電気株式会社
店舗端末、情報処理方法、及びプログラム
18日前
日本電気株式会社
情報処理装置、情報処理方法、プログラム
18日前
日本電気株式会社
処理システム、処理方法、およびプログラム
1か月前
日本電気株式会社
健康管理装置、健康管理方法及びプログラム
26日前
日本電気株式会社
視聴支援装置、視聴支援方法及びプログラム
24日前
日本電気株式会社
合意判定装置、合意判定方法及びプログラム
24日前
日本電気株式会社
行動推奨装置、行動推奨方法及びプログラム
1か月前
日本電気株式会社
処理システム、処理方法、およびプログラム
1か月前
日本電気株式会社
経路選択装置、経路選択方法及びプログラム
16日前
日本電気株式会社
追跡支援装置、追跡支援方法及びプログラム
1か月前
日本電気株式会社
追跡支援装置、追跡支援方法及びプログラム
1か月前
日本電気株式会社
合意判定装置、合意判定方法及びプログラム
3日前
日本電気株式会社
情報処理装置、情報処理方法、及びプログラム
24日前
日本電気株式会社
質問処理装置、質問処理方法、及びプログラム
9日前
日本電気株式会社
情報処理装置、分析方法、及び分析プログラム
24日前
日本電気株式会社
情報処理装置、情報処理方法およびプログラム
3日前
日本電気株式会社
画像生成装置、画像生成方法、及びプログラム
24日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ