TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025151910
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024053539
出願日
2024-03-28
発明の名称
プログラム、コンピューター
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
9/22 20060101AFI20251002BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ユーザーがI/O信号ごとに役割を表す名称を付すための手間が発生することや、名称が付されるまでI/O信号の役割を誤って認識することが課題であった。
【解決手段】ロボットの制御に係わる周辺機器に入出力されるI/O信号ごとの、役割を表す役割情報を設定できる1種類以上の役割設定画面であって、周辺機器の種類とI/O信号のためのI/O端子の種類と役割の種類との少なくとも1種類に応じた役割情報をI/O信号ごとに設定させるために、I/O信号の識別情報と役割情報を表示する1種類以上の役割設定画面を表示部に表示する機能と、識別情報および役割情報が設定されているI/O信号について、少なくとも1種類を表す予め定められた種別情報を、I/O信号ごとに識別情報と対応づけて表示するI/O確認画面を表示部に表示する機能と、をコンピューターに実行させる、プログラム。
【選択図】図4
特許請求の範囲
【請求項1】
プログラムであって、
ロボットの制御に係わる周辺機器に入出力されるI/O信号ごとの、役割を表す役割情報を設定できる1種類以上の役割設定画面であって、前記周辺機器の種類と前記I/O信号のためのI/O端子の種類と前記役割の種類との少なくとも1種類に応じた前記役割情報を前記I/O信号ごとに設定させるために、前記I/O信号の識別情報と前記役割情報を表示する1種類以上の役割設定画面を表示部に表示する機能と、
前記識別情報および前記役割情報が設定されているI/O信号について、前記少なくとも1種類を表す予め定められた種別情報を、前記I/O信号ごとに前記識別情報と対応づけて表示するI/O確認画面を前記表示部に表示する機能と、
をコンピューターに実行させる、プログラム。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載のプログラムであって、
前記I/O確認画面を前記表示部に表示する機能は、前記種別情報として画像を表示する、プログラム。
【請求項3】
請求項2に記載のプログラムであって、
前記I/O確認画面を前記表示部に表示する機能は、前記種別情報と前記識別情報を隣接した状態で表示する、プログラム。
【請求項4】
請求項2に記載のプログラムであって、
前記I/O確認画面を前記表示部に表示する機能は、さらに、前記I/O信号ごとの入出力の状態を表す状態情報を、前記識別情報と対応づけて表示する、プログラム。
【請求項5】
請求項2に記載のプログラムであって、
前記I/O確認画面を前記表示部に表示する機能は、前記識別情報として連続の番号を表示し、前記番号の順に前記種別情報を配列して表示する、プログラム。
【請求項6】
請求項2から5のいずれか一項に記載のプログラムであって、
前記種別情報は、前記役割の種類のうち前記ロボットをリモートコントロールするリモート機能を表す画像の情報を含む、プログラム。
【請求項7】
請求項2から5のいずれか一項に記載のプログラムであって、
前記種別情報は、前記周辺機器のうち前記ロボットに接続されるハンドを表す1種類以上の画像の情報を含む、プログラム。
【請求項8】
請求項2から5のいずれか一項に記載のプログラムであって、
前記I/O端子は、さらに、前記周辺機器から出力されるトリガー信号が入力されるリアルタイムI/O端子、を含み、
前記種別情報は、前記I/O端子のうち、前記リアルタイムI/O端子を表す1種類以上の画像の情報を含む、プログラム。
【請求項9】
請求項2から5のいずれか一項に記載のプログラムであって、
前記I/O端子は、さらに、フィールドバスに用いられるフィールドバスI/O端子を、含み
前記種別情報は、前記I/O端子のうち、前記フィールドバスI/O端子を表す1種類以上の画像の情報を含む、プログラム。
【請求項10】
請求項2から5のいずれか一項に記載のプログラムであって、
前記1種類以上の役割設定画面を表示部に表示する機能は、前記周辺機器のうち前記ロボットに接続されるハンドの種類に応じた前記役割情報を設定できるハンド役割設定画面を少なくとも表示する、プログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、プログラム、コンピューターに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
ロボット制御装置は、シリアル通信により周辺機器と情報の送受信を行う。周辺機器は、例えば、ロボットのエンドエフェクタ、PLC(Programmable Logic Controller)やHMI(Human Machine Interface)などである。以下において、ロボット制御装置が受信する信号を入力信号と呼び、ロボット制御装置から送信される信号を出力信号と呼ぶ。入力信号および出力信号を総称して、I/O(Input/Output)信号と呼ぶ。
【0003】
特許文献1のロボット制御装置の設定画面では、ロボット制御装置と周辺機器の間で送受信されるI/O信号について、ユーザーが何番目の信号により何を制御させるといった設定が行われる。例えば、設定画面では、1番目の入力信号を特定の周辺機器の機能をONさせる指令に使用するという設定が行われる。すなわち、設定画面では、I/O信号ごとの役割が設定される。
【先行技術文献】
【特許文献】
【0004】
特開2017-140666号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
発明者らは、同様の機能を有するプログラムを開発していた。発明者の開発したプログラムは、I/O信号ごとの役割をユーザーが容易に確認できるように、ユーザー自身がI/O信号ごとに役割を表す名称を付すことができる画面を、ロボット制御装置の設定画面に表示する。
【0006】
しかし、ユーザーがI/O信号ごとに役割を表す名称を付すための手間が発生することや、名称が付されるまでI/O信号の役割を誤って認識することが課題であった。
【課題を解決するための手段】
【0007】
本開示の第1の形態によれば、プログラムが提供される。このプログラムは、ロボットの制御に係わる周辺機器に入出力されるI/O信号ごとの、役割を表す役割情報を設定できる1種類以上の役割設定画面であって、前記周辺機器の種類と前記I/O信号のためのI/O端子の種類と前記役割の種類との少なくとも1種類に応じた前記役割情報を前記I/O信号ごとに設定させるために、前記I/O信号の識別情報と前記役割情報を表示する1種類以上の役割設定画面を表示部に表示する機能と、前記識別情報および前記役割情報が設定されているI/O信号について、前記少なくとも1種類を表す予め定められた種別情報を、前記I/O信号ごとに前記識別情報と対応づけて表示するI/O確認画面を前記表示部に表示する機能と、をコンピューターに実行させる。
【0008】
本開示の第2の形態によれば、コンピューターが提供される。このコンピューターは、画面を表示する表示部と、制御部と、を備えるコンピューターであって、前記制御部は、ロボットの制御に係わる周辺機器に入出力されるI/O信号ごとの、役割を表す役割情報を設定できる1種類以上の役割設定画面であって、前記周辺機器の種類と前記I/O信号のためのI/O端子の種類と前記役割の種類との少なくとも1種類に応じた前記役割情報を前記I/O信号ごとに設定させるために、前記I/O信号の識別情報と前記役割情報を表示する1種類以上の役割設定画面を、前記表示部に表示させ、前記識別情報および前記役割情報が設定されているI/O信号について、前記少なくとも1種類を表す予め定められた種別情報を、前記I/O信号ごとに前記識別情報と対応づけて表示するI/O確認画面を前記表示部に表示させる。
【図面の簡単な説明】
【0009】
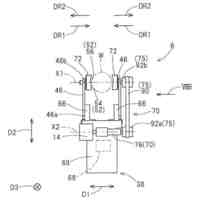
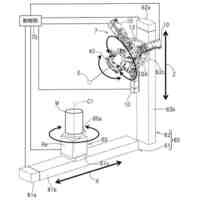
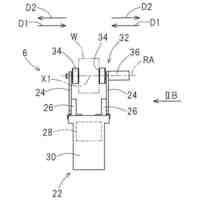
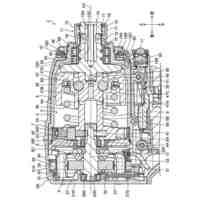
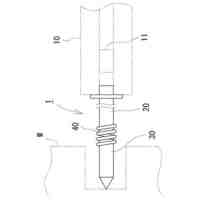
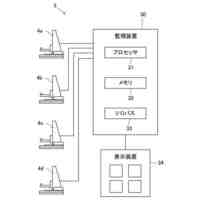
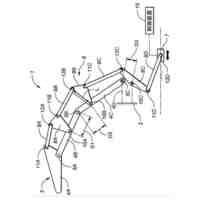
第1実施形態のロボットシステムの構成を示す説明図。
第1役割設定画面を示す説明図。
第2役割設定画面を示す説明図。
第1のI/O確認画面を示す説明図。
種別情報を表す説明図。
第2のI/O確認画面を示す説明図。
第2実施形態のロボットシステムの構成を示す説明図。
ステータス表示領域を表示している設定画面を示す説明図。
ステータス表示領域を表示していない設定画面を示す説明図。
【発明を実施するための形態】
【0010】
A.第1実施形態:
A-1.システムの構成:
図1は、第1実施形態のロボットシステム10の構成を示す説明図である。ロボットシステム10は、ロボット11と、教示装置12と、周辺機器13と、ロボット制御装置14と、を備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
フラワーホッチキス。
3日前
川崎重工業株式会社
ロボット
16日前
株式会社竹中工務店
補助セット
15日前
株式会社不二越
ロボット
15日前
川崎重工業株式会社
ハンド
7日前
株式会社不二越
移動ロボットシステム
18日前
工機ホールディングス株式会社
作業機
7日前
トヨタ自動車株式会社
ロボット
10日前
株式会社不二越
エッジ仕上げ装置
28日前
川崎重工業株式会社
塗装システム
7日前
本田技研工業株式会社
装置
21日前
トヨタ自動車株式会社
軌道生成装置
10日前
工機ホールディングス株式会社
作業機
7日前
シンフォニアテクノロジー株式会社
搬送装置
18日前
アネックスツール株式会社
ドライバービット
14日前
川崎重工業株式会社
ワーク搬送ロボット
7日前
株式会社不二越
ロボットに用いる伝送路
今日
株式会社マキタ
回転打撃工具
10日前
ワールド技研株式会社
ロボットセル装置
15日前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
28日前
NTN株式会社
ハンド
16日前
山九株式会社
レンチ保持治具
10日前
トヨタ自動車株式会社
ロボットの制御装置
14日前
セイコーエプソン株式会社
ロボット
14日前
NTN株式会社
作業装置
14日前
川崎重工業株式会社
ロボット
14日前
NTN株式会社
把持装置
16日前
NTN株式会社
把持装置
16日前
株式会社マキタ
電動工具
18日前
株式会社マキタ
電動工具
18日前
トヨタ自動車株式会社
モバイルマニピュレータ
今日
東レエンジニアリング株式会社
ツール動作機構
9日前
アピュアン株式会社
衝撃工具用チゼル部材
18日前
川崎重工業株式会社
監視システム
8日前
本田技研工業株式会社
リンク機構
14日前
株式会社デンソーウェーブ
搬送システム、ロボットハンド
14日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ