TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025145356
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024045478
出願日
2024-03-21
発明の名称
リンク機構
出願人
本田技研工業株式会社
代理人
弁理士法人大島特許事務所
主分類
B25J
15/08 20060101AFI20250926BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】直動アクチュエータの推力及び駆動機構の可動幅を大きくすることなく、リンクのトルク及び最大関節角度を大きくする。
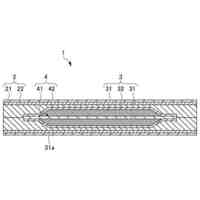
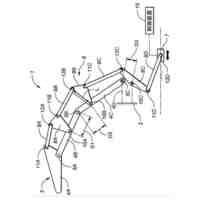
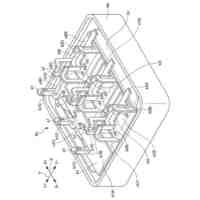
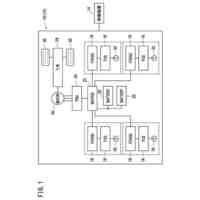
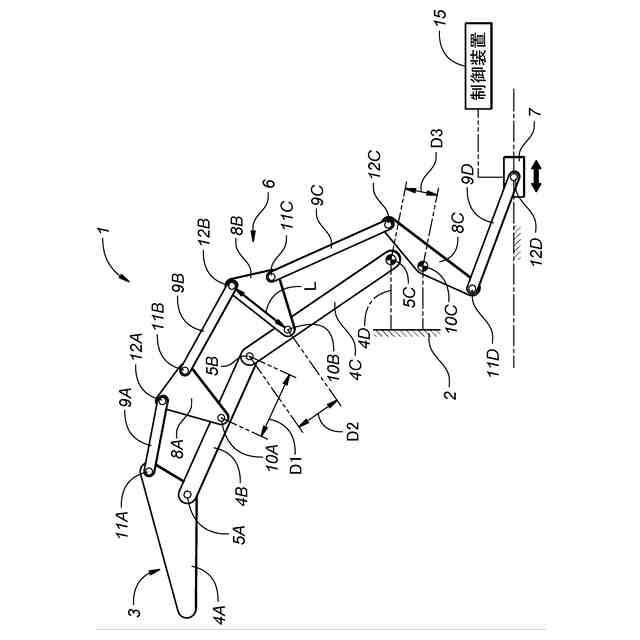
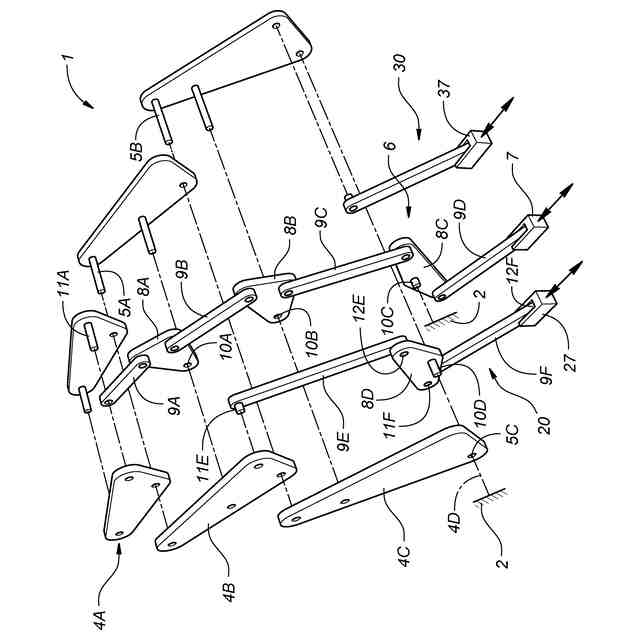
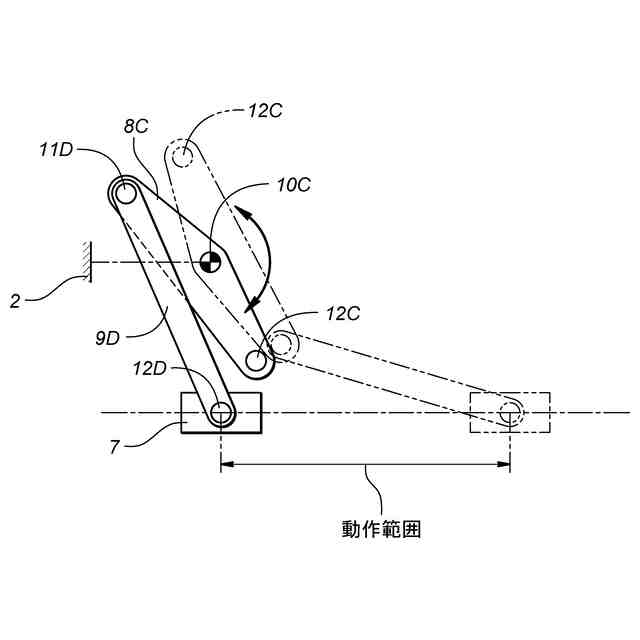
【解決手段】リンク機構3は、関節5を介して直列に接続された複数のリンク4と、複数のリンク4を駆動するための第1駆動機構6とを備える。第1駆動機構6は、リンク4に枢支された少なくとも1つのロッカー8と、複数のリンク4を駆動するための第1アクチュエータ7と、リンク4、ロッカー8及び第1アクチュエータ7を直列に接続する複数のロッド9と、を備える。少なくとも1つのロッカー8の基端10が、対応するリンク4における関節5からオフセットしている。
【選択図】図1
特許請求の範囲
【請求項1】
リンク機構であって、
関節を介して直接に接続された複数のリンクと、
複数の前記リンクを駆動するための駆動機構と、を備え、
前記駆動機構が、
対応する前記リンクに枢支された少なくとも1つのロッカーと、
複数の前記リンクを駆動するための少なくとも1つのアクチュエータと、
前記リンク、前記ロッカー及び前記アクチュエータを直列に接続する複数のロッドと、を備え、
少なくとも1つの前記ロッカーの基端が、対応する前記リンクにおける前記関節からオフセットしているリンク機構。
続きを表示(約 1,600 文字)
【請求項2】
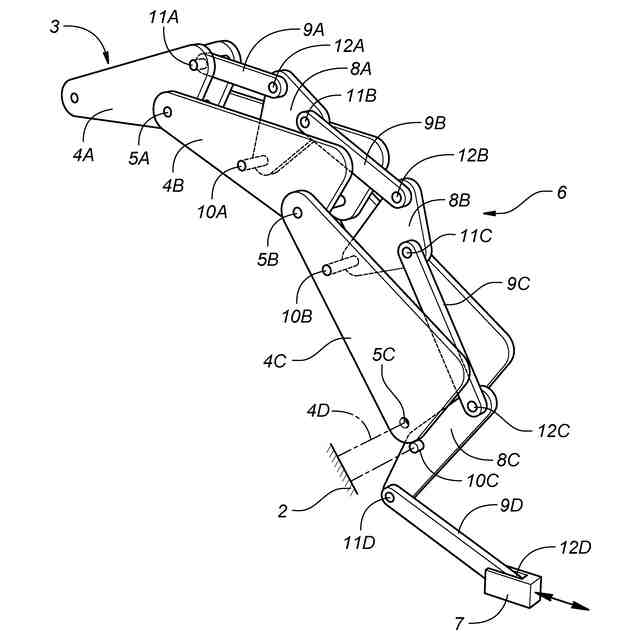
複数の前記リンクが、第1リンクと、前記第1リンクに第1関節を介して接続された第2リンクと、前記第2リンクに第2関節を介して接続された第3リンクと、を含み、
前記駆動機構が、前記第1リンクを駆動するための第1駆動機構を含み、
前記第1駆動機構が、
前記第2リンクの中間部に枢支された基端を有する第1ロッカーと、
前記第1リンクの前記第1関節以外の部分に枢支された一端及び前記第1ロッカーの遊端側に枢支された他端を有する第1ロッドと、
前記第3リンクの中間部に枢支された基端を有する第2ロッカーと、
前記第1ロッカーの遊端側に枢支された一端及び前記第2ロッカーの遊端側に枢支された他端を有する第2ロッドと、
前記第1リンクを駆動するべく、前記第2ロッカーを駆動する第1アクチュエータと、を備える、請求項1に記載のリンク機構。
【請求項3】
複数の前記リンクが、前記第3リンクに第3関節を介して接続された第4リンクを更に含み、
前記第1駆動機構が、
前記第4リンクの前記第3関節以外の部分に枢支された基端を有する第3ロッカーと、
前記第2ロッカーの遊端側に枢支された一端及び前記第3ロッカーの遊端側に枢支された他端を有する第3ロッドと、を更に備え、
前記第1アクチュエータが、前記第3ロッカーを介して前記第2ロッカーを駆動する、請求項2に記載のリンク機構。
【請求項4】
前記第1駆動機構が、前記第3ロッカーの遊端側に枢支された一端を有する第4ロッドを更に備え、
前記第1アクチュエータが、前記第4ロッドの他端を枢支する直動アクチュエータである、請求項3に記載のリンク機構。
【請求項5】
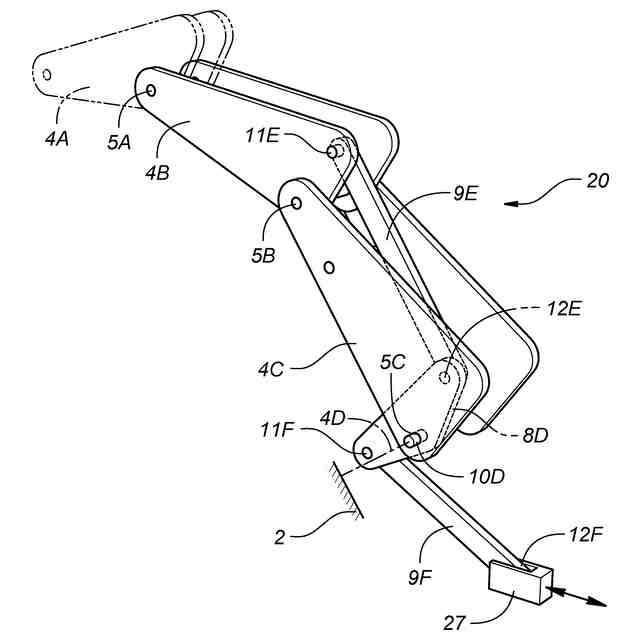
前記駆動機構が、前記第2リンクを駆動するための第2駆動機構を更に含み、
前記第2駆動機構が、
前記第3リンクに枢支された基端を有する第4ロッカーと、
前記第2リンクの前記第2関節以外の部分に枢支された一端及び前記第4ロッカーの遊端側に枢支された他端を有する第5ロッドと、
前記第2リンクを駆動するべく、前記第4ロッカーを駆動する第2アクチュエータと、を備え、
前記第1駆動機構と前記第2駆動機構とは、並列に配置され、協働して前記第2リンクを駆動する2列パラレルメカニズムを構成する、請求項3に記載のリンク機構。
【請求項6】
前記第2駆動機構が、前記第4ロッカーの遊端側に枢支された一端を有する第6ロッドを更に備え、
前記第2アクチュエータが、前記第6ロッドの他端を枢支する直動アクチュエータである、請求項5に記載のリンク機構。
【請求項7】
前記駆動機構が、前記第3リンクを駆動するための第3駆動機構を更に含み、
前記第3駆動機構が、
前記第3リンクの前記第3関節以外の部分に枢支された一端を有する第7ロッドと、
前記第7ロッドの他端を枢支する直動アクチュエータからなる第3アクチュエータと、を備え、
前記第3駆動機構と前記第1駆動機構と前記第2駆動機構とは、並列に配置され、協働して前記第3リンクを駆動する3列パラレルメカニズムを構成する、請求項5に記載のリンク機構。
【請求項8】
前記第2ロッカーの前記第2ロッドを枢支する遊端から前記第2ロッカーの基端までのアーム長と、前記第2関節から前記第2ロッカーの基端までのオフセット寸法とが略等しい、請求項2に記載のリンク機構。
【請求項9】
前記第1関節及び前記第2関節の関節角度が最大のときに、前記第2ロッカーの前記第2ロッドを枢支する遊端が前記第2関節と略一致する、請求項8に記載のリンク機構。
発明の詳細な説明
【技術分野】
【0001】
本発明は、関節を介して直接に接続された複数のリンクを備えるリンク機構に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
従来、ロボットに多種多様な作業を行わせることを目的として、人間の手を模倣したロボットハンド装置が知られている(例えば、特許文献1、2)。これらのロボットハンドは、人間の手のひらや手の甲の部分に相当する基部と、基部の一端縁から延設される指機構(指リンク機構)と、動力源の動力によって指機構を作動させるための作動機構(駆動機構)とを備えている。
【0003】
特許文献1に記載のロボットハンドでは、単一のモータで2軸回りに指機構を作動させることができるように、駆動機構が1次リンク機構、2次リンク機構、直線運動機構を備えている。指機構は、これらの機構を介して、モータによって伸長状態から屈曲状態に又は屈曲状態から伸長状態になるように駆動される。
【0004】
特許文献2に記載のロボットハンドは、複数の指機構と、これらの指機構を駆動する1つの動力源とを備えている。作動機構は、1つの動力源により、異なる折れ曲がり量をもって複数の指機構を作動させることができるように構成されている。具体的には、各指機構を作動させるための作動機構がそれぞれ2つのリンクアームを備え、作動機構の一部は、両リンクアームのリンク比が他の作動機構のリンク比と異なるように構成される。各指機構は、リンク比に応じ、基部に対して真っ直ぐ延びた位置と折れ曲がった位置との間を変位する。
【0005】
これらのロボットハンドの指リンク機構は、複数(具体的には3つ)のリンク(節間部材)とリンクと同じ数の関節(関節部材)とを備え、掌部をなす基部に連結されている。掌部は、ロボットのアームの一部であるため、複数のリンク(前腕、上腕)と複数の関節(手首、肘、肩)を介して本体(上体)に連結される。
【先行技術文献】
【特許文献】
【0006】
特許第5430253号公報
特許第6154698号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、人の指は、指先から順に第1~第3関節としたときに、第1~第3関節の関節角度(伸展位置を0度としたときの屈曲角度)の最大値の合計が270度程度になる。すなわち、各関節の平均最大関節角度が90度程度になる。しかしながら、従来のロボットハンドの指リンク機構では、各関節の最大関節角度は50-60度程度であり、人の指関節の平均最大関節角度に比べて小さかった。そのため、従来のロボットハンドは、人の手が細い棒を掴むときの動作のように大きな関節角度を必要とする動作を行うことができなかった。
【0008】
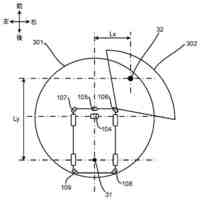
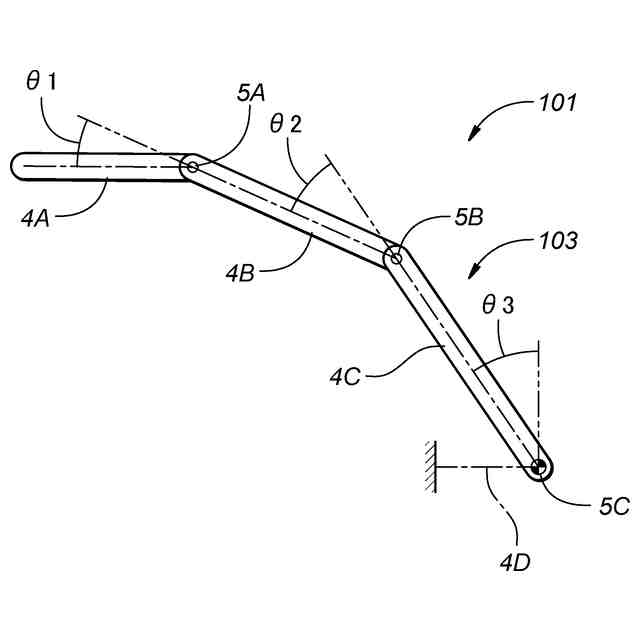
ここで、大きな関節角度を実現するための駆動機構について検討する。図9は、人の指のように3つのリンク4(4A、4B、4C)が直列に接続された従来のロボット101のリンク機構103の概略構成を示す図である。リンク機構103は、指又は腕に相当する構成をしており、遊端から順に第1リンク4Aと、第1リンク4Aに第1関節5Aを介して接続された第2リンク4Bと、第2リンク4Bに第2関節5Bを介して接続された第3リンク4Cとを備えている。各関節は関節軸(枢軸)によって構成されている。第1リンク4Aは、第2リンク4Bに対して第1関節角度θ1をもって延在している。第2リンク4Bは、第3リンク4Cに対して第2関節角度θ2をもって延在している。第3リンク4Cは、掌や上体等の基体をなす第4リンク4Dに対して第3関節角度θ3をもって延在している。なお、関節角度θは、遊端側のリンク4が基端側のリンク4に対して伸展した位置を基準(0度)として定義される。つまり、関節角度θは、基端側のリンク4の延在方向を基準とするものではない。
【0009】
リンク機構103を人の指のように作動させる場合、第1関節5A~第3関節5Cの最大関節角度を90度とし、各リンク4の可動角度範囲を0~90度にしたいという要望がある。また、リンク機構103を駆動するアクチュエータをできるだけ小型化したいという要望がある。例えば、直動アクチュエータ107(図10)がリンク駆動用のアクチュエータに採用される場合、リンク4に所定のトルクを発揮させるために必要な直動アクチュエータ107の推力(推し引きする力)は小さいほどよい。直動アクチュエータ107の推力を小さくするためには、直動アクチュエータ107の変位に対する関節角度θの変位が小さいほどよい。
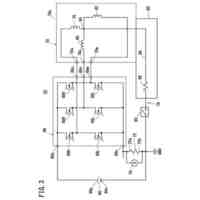
【0010】
図10は、リンク機構103を作動させるための駆動機構として平行リンク機構106を備えたロボット101の概略構成図である。図10に示すように、平行リンク機構106は、第2関節5Bに枢支される第1ロッカー108Aと、第1リンク4Aの第1関節5A以外の部分と第1ロッカー108Aの遊端側とを連結する第1ロッド9Aとを備える。また、平行リンク機構106は、第3関節5Cに枢支される第2ロッカー108Bと、第1ロッカー108Aの遊端側と第2ロッカー108Bの遊端側とを連結する第2ロッド9Bとを備える。第2ロッカー108Bの遊端側は、第3ロッド9Cを介して直動アクチュエータ107に連結される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
車両
1か月前
本田技研工業株式会社
装置
8日前
本田技研工業株式会社
車両
9日前
本田技研工業株式会社
モータ
5日前
本田技研工業株式会社
会話装置
1日前
本田技研工業株式会社
車両構造
5日前
本田技研工業株式会社
車両構造
5日前
本田技研工業株式会社
バッテリ
2日前
本田技研工業株式会社
バッテリ
2日前
本田技研工業株式会社
受電装置
3日前
本田技研工業株式会社
送電装置
3日前
本田技研工業株式会社
ステータ
1日前
本田技研工業株式会社
保持装置
2日前
本田技研工業株式会社
保管装置
3日前
本田技研工業株式会社
保管装置
3日前
本田技研工業株式会社
ロボット
1か月前
本田技研工業株式会社
内燃機関
8日前
本田技研工業株式会社
内燃機関
8日前
本田技研工業株式会社
固体電池
3日前
本田技研工業株式会社
切断装置
1日前
本田技研工業株式会社
電解装置
16日前
本田技研工業株式会社
回転機械
1か月前
本田技研工業株式会社
通知装置
8日前
本田技研工業株式会社
断続装置
3日前
本田技研工業株式会社
触媒インク
1か月前
本田技研工業株式会社
鞍乗型車両
15日前
本田技研工業株式会社
触媒インク
1か月前
本田技研工業株式会社
リンク機構
1日前
本田技研工業株式会社
リアクトル
8日前
本田技研工業株式会社
潤滑システム
15日前
本田技研工業株式会社
車両制御装置
9日前
本田技研工業株式会社
車両制御装置
17日前
本田技研工業株式会社
動力伝達装置
1か月前
本田技研工業株式会社
電源システム
3日前
本田技研工業株式会社
潤滑システム
3日前
本田技研工業株式会社
放電処理方法
3日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ