TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025142529
公報種別
公開特許公報(A)
公開日
2025-10-01
出願番号
2024041947
出願日
2024-03-18
発明の名称
断続装置
出願人
本田技研工業株式会社
代理人
弁理士法人航栄事務所
主分類
F16D
41/08 20060101AFI20250924BHJP(機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段)
要約
【課題】適切に遮断状態から接続状態へ切り替え可能な断続装置を提供する。
【解決手段】第1断続機構210は、第1従動ギヤ184と第2シャフト182との間に配置されるローラ281と、ローラ281を第1従動ギヤ184と第2シャフト182とが一体回転可能な係合状態と、第1従動ギヤ184と第2シャフト182とが相対回転可能な非係合状態と、に操作する操作機構240、リテーナ282、ピン283、ガイド284と、を備える。リテーナ282は、当接状態と非当接状態とに遷移可能に設けられる当接切替機構290を有し、当接切替機構290は、当接状態で第1の圧力で第1従動ギヤ184に対して当接するとともに、非当接状態で第1の圧力よりも弱い第2の圧力で第1従動ギヤ184に対して当接する、又は、第1従動ギヤ184に当接しないよう設けられる。
【選択図】図8
特許請求の範囲
【請求項1】
第1回転体と第2回転体との間に配置される係合子と、
前記係合子を、前記第1回転体と前記第2回転体とが一体回転可能な係合状態と、前記第1回転体と前記第2回転体とが相対回転可能な非係合状態と、に操作する操作部と、を備える断続装置であって、
前記操作部は、
前記係合子を動かす作動子と、
該作動子を介して前記係合子を操作可能に、又は該作動子を介さず前記係合子を操作可能に設けられる操作子と、を有し、
前記第1回転体及び前記第2回転体は、
互いの回転軸線が一致するように、且つ、
前記回転軸線と直交する直交方向視で、互いの少なくとも一部が重なり合うよう配置され、
前記操作子は、
前記回転軸線と直交する直交方向に沿って進退移動可能に設けられる進退子と、
前記回転軸線に沿って延在し、かつ該回転軸線に沿って進退移動可能に設けられる延在部と、を有し、
前記作動子は、前記回転軸線に対する円周方向において該係合子と同径上に設けられ、前記進退子を保持する保持器を含み、
前記保持器は、第1の状態と第2の状態とに遷移可能に設けられる当接部を有し、
前記当接部は、
前記第1の状態で第1の圧力で前記第1回転体に対して当接するとともに、
前記第2の状態で前記第1の圧力よりも弱い第2の圧力で前記第1回転体に対して当接する、又は、前記第1回転体に当接しないよう設けられる、
断続装置。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の断続装置であって、
前記当接部は、
前記回転軸線と直交する直交方向に沿って進退移動可能に設けられる他の進退子と、
前記他の進退子と機械的に接続される当接主部と、を有し、
前記当接主部は、
該他の進退子が退去した退去位置に位置するときに前記第1の状態となり、
該他の進退子が進出した進出位置に位置するときに前記第2の状態となる、
断続装置。
【請求項3】
請求項2に記載の断続装置であって、
前記他の進退子は、該他の進退子の前記直交方向における前記回転軸線側の端部である内端が、前記延在部と当接するよう設けられる、
断続装置。
【請求項4】
請求項3に記載の断続装置であって、
前記当接主部は、前記他の進退子の前記内端が前記延在部に当接するように付勢する付勢部を含む、
断続装置。
【請求項5】
請求項4に記載の断続装置であって、
前記進退子は、該進退子の前記直交方向における前記回転軸線側の端部である内端が、前記延在部と当接するよう設けられ、
前記第1回転体及び第2回転体は、
前記進退子が退去した退去位置に位置するときに一体回転可能に構成され、
前記進退子が進出した進出位置に位置するときに相対回転可能に構成される、
断続装置。
【請求項6】
請求項5に記載の断続装置であって、
前記他の進退子は、
前記延在部が第1位置から第2位置へ移動するとき、前記付勢部の付勢力により前記進出位置から前記退去位置に移動し、
前記延在部が前記第2位置から前記第1位置へ移動するとき、前記延在部との当接により前記退去位置から前記進出位置に移動し、
前記進退子は、
前記延在部が第1位置から第2位置へ移動するとき、前記進出位置に位置し、
前記延在部が前記第2位置から前記第1位置へ移動するとき、前記延在部との当接により前記退去位置から前記進出位置に移動する、
断続装置。
【請求項7】
請求項6に記載の断続装置であって、
前記進退子は、
前記延在部が第1位置から第2位置へ移動した後、前記他の進退子が前記進出位置から前記退去位置へ移動して前記第1回転体と前記第2回転体とが相対回転することにより、前記進退子は前記進出位置から前記退去位置に移動する、
断続装置。
【請求項8】
請求項4~7のいずれか1項に記載の断続装置であって、
前記付勢部は、前記第1の状態で第1の形状となり、前記第2の状態で第2の形状となるよう設けられる、
断続装置。
【請求項9】
請求項2~8のいずれか1項に記載の断続装置であって、
前記当接主部は、可撓性を有する材料を含み、
前記第1の状態で第1の形状となり、前記第2の状態で第2の形状となるよう設けられる、
断続装置。
【請求項10】
請求項2~7のいずれか1項に記載の断続装置であって、
前記当接主部は、前記保持器に対して揺動軸を支点に揺動可能に支持される揺動部を含む、
断続装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、断続装置に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
従来、回転体同士が一体回転可能な状態と相対回転可能な状態とを切り替える断続装置が知られている。このような断続装置は、車両の駆動装置、作業機の作業部、義足等の継手装置などに利用される。
【0003】
このような断続装置では、状況に応じて適切に前述の2つの状態を切り替え可能であることが求められる。例えば、特許文献1には、2つの回転体の間に配置されるリテーナの外周面に、ゴム球やOリングなどの弾性部材を設け、外周側の回転体とリテーナとの間に適度な摩擦を生じさせることで、回転体同士が相対回転可能な状態から一体回転可能な状態へと適切に切り替えられるように構成されている。
【先行技術文献】
【特許文献】
【0004】
国際公開第2022/260098号
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、外周側の回転体とリテーナとの間に配置される弾性部材は、回転体同士が相対回転可能な状態のとき常時外周側の回転体と摺接しているため摩耗してしまう。弾性部材が摩耗してしまうと断続装置の切り替えが適切に行えない事態が発生し得る。
【0006】
本発明は、回転体同士が一体回転可能な状態と相対回転可能な状態とを適切に切り替え可能な断続装置を提供する。
【課題を解決するための手段】
【0007】
本発明は、
第1回転体と第2回転体との間に配置される係合子と、
前記係合子を、前記第1回転体と前記第2回転体とが一体回転可能な係合状態と、前記第1回転体と前記第2回転体とが相対回転可能な非係合状態と、に操作する操作部と、を備える断続装置であって、
前記操作部は、
前記係合子を動かす作動子と、
該作動子を介して前記係合子を操作可能に、又は該作動子を介さず前記係合子を操作可能に設けられる操作子と、を有し、
前記第1回転体及び前記第2回転体は、
互いの回転軸線が一致するように、且つ、
前記回転軸線と直交する直交方向視で、互いの少なくとも一部が重なり合うよう配置され、
前記操作子は、
前記回転軸線と直交する直交方向に沿って進退移動可能に設けられる進退子と、
前記回転軸線に沿って延在し、かつ該回転軸線に沿って進退移動可能に設けられる延在部と、を有し、
前記作動子は、前記回転軸線に対する円周方向において該係合子と同径上に設けられ、前記進退子を保持する保持器を含み、
前記保持器は、第1の状態と第2の状態とに遷移可能に設けられる当接部を有し、
前記当接部は 、
前記第1の状態で第1の圧力で前記第1回転体に対して当接するとともに、
前記第2の状態で前記第1の圧力よりも弱い第2の圧力で前記第1回転体に対して当接する、又は、前記第1回転体に当接しないよう設けられる。
【発明の効果】
【0008】
本発明によれば、回転体同士が一体回転可能な状態と相対回転可能な状態とを適切に切り替えることができる。
【図面の簡単な説明】
【0009】
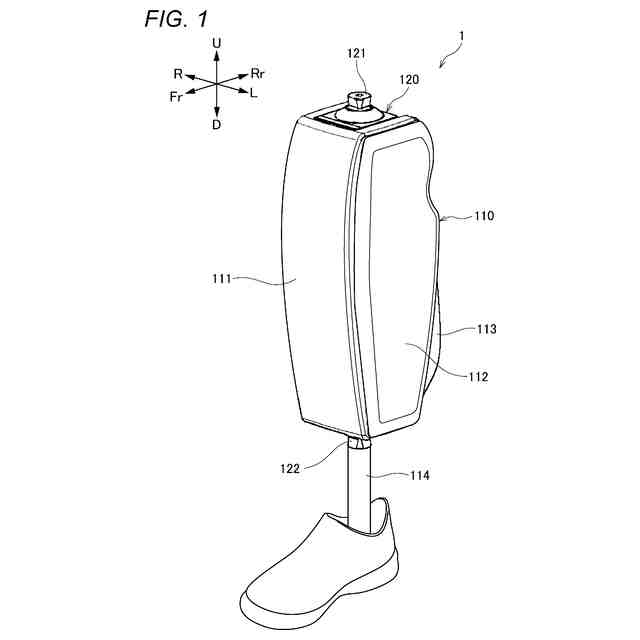
第1実施形態の電動義足1を斜め前方から見た斜視図である。
電動義足1の分解斜視図である。
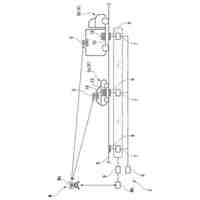
電動義足1の断面図である。
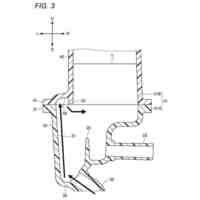
伸縮装置140の断面図である。
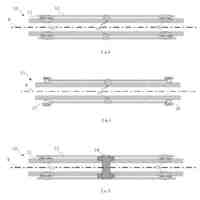
電動義足1の屈曲状態を示す要部断面図である。
電動義足1の最大屈曲状態を示す要部断面図である。
二方向クラッチの断面図である。
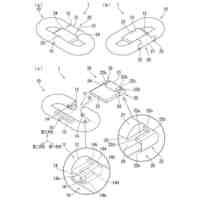
リテーナ282の要部分解斜視図である。
操作機構240の動作を示す図であり、(A)は断続部212及び断続部222がオフの状態を示す図、(B)は断続部212がオフ、断続部222がオンの状態を示す図、(C)は断続部212がオン、断続部222がオフの状態を示す図である。
(A)は、断続部222がオフの状態を示す断面図であり、(B)はそのときの操作ロッド241の位置を示す図である。
(A)は、断続部222がオフからオンへ移行する過程を示す断面図であり、(B)はそのときの操作ロッド241の位置を示す図である。
(A)は、断続部222のオン状態を示す断面図であり、(B)はそのときの操作ロッド241の位置を示す図である。
昇段時の人間及び電動義足1の動作(昇段動作)を示す図である。
平地歩行時の人間及び電動義足1の動作(平地歩行動作)を示す図である。
第2実施形態の電動義足1の断面図である。
第3実施形態の電動義足1の側面図である。
第3実施形態の電動義足1に搭載される拡縮装置200の斜視図である。
図17の拡縮装置200の断面図である。
第1変形例を示すリテーナ282の斜視図である。
第1変形例を示すリテーナ282の分解斜視図である。
第1変形例の動作を示す図であり、(A)は、断続部222がオフの状態を示す断面図であり、(B)は、断続部222がオフからオンへ移行する過程を示す断面図であり、(C)は、断続部222のオン状態を示す断面図である。
【発明を実施するための形態】
【0010】
以下、本発明の断続装置を内蔵した電動義足の一実施形態について図面を参照しながら説明する。なお、以下の説明では、電動義足の使用者を基準に前後方向、左右方向、上下方向を定義する。図面には、電動義足の前方をFr、後方をRr、左側をL、右側をR、上方をU、下方をDとして示す。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
車両
1か月前
本田技研工業株式会社
冷却液タンク
2日前
本田技研工業株式会社
蓄電システム
4日前
本田技研工業株式会社
差圧式電解装置
1か月前
本田技研工業株式会社
スポット溶接方法
24日前
本田技研工業株式会社
駆動装置ユニット
1か月前
本田技研工業株式会社
回転電機用ロータ
11日前
本田技研工業株式会社
電動無段変速装置
1か月前
本田技研工業株式会社
回転電機のロータ
1か月前
本田技研工業株式会社
非接触電力伝送システム
4日前
本田技研工業株式会社
金属シリコンの製造方法
11日前
本田技研工業株式会社
電力変換装置、および車両
3日前
本田技研工業株式会社
積層体、積層体の製造方法
3日前
本田技研工業株式会社
制御装置、および、制御方法
24日前
本田技研工業株式会社
情報処理方法及びプログラム
23日前
本田技研工業株式会社
正極、固体電池及び固体電池の製造方法
1か月前
本田技研工業株式会社
二酸化炭素回収装置及び二酸化炭素回収方法
1か月前
本田技研工業株式会社
情報処理装置、情報処理方法、およびプログラム
23日前
本田技研工業株式会社
制御装置
25日前
本田技研工業株式会社
作動装置
23日前
本田技研工業株式会社
移動体の制御装置、移動体の制御方法、およびプログラム
18日前
本田技研工業株式会社
学習装置、推定装置、学習方法、推定方法及びプログラム
1か月前
本田技研工業株式会社
車両、制御方法、プログラム、記憶媒体、及び情報処理装置
23日前
本田技研工業株式会社
電池の充電状態の補正方法、電池均等化方法、端末機器及び車両
10日前
本田技研工業株式会社
移動体支援装置および移動体システム
1か月前
本田技研工業株式会社
熱媒体組み合わせ最適化装置、熱媒体組み合わせ最適化方法、および、熱媒体組み合わせ最適化プログラム
11日前
個人
留め具
1か月前
個人
鍋虫ねじ
3か月前
個人
紛体用仕切弁
3か月前
個人
ホース保持具
7か月前
個人
回転伝達機構
3か月前
個人
差動歯車用歯形
5か月前
個人
トーションバー
8か月前
個人
給排気装置
1か月前
個人
ジョイント
2か月前
個人
ナット
2か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ