TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025166133
公報種別
公開特許公報(A)
公開日
2025-11-05
出願番号
2025134170,2023090186
出願日
2025-08-12,2023-05-31
発明の名称
制御装置
出願人
本田技研工業株式会社
代理人
弁理士法人航栄事務所
主分類
G08G
1/16 20060101AFI20251028BHJP(信号)
要約
【課題】外界センサによる物体の検出精度が他の領域と比べて相対的に低い特定領域が発生しても、車線変更制御の実行可否の判断が困難である状態が長時間継続することを抑制できる移動体の制御装置を提供する。
【解決手段】制御装置100は、車線変更機能が有効である場合、外界センサ11による物体の検出精度が他の領域に比べて相対的に低い検出困難領域420に他の車両が存在すると推定されたとき、車線変更制御の実行を制限する。制御装置100は、車線変更制御の実行を制限した後、検出困難領域420に他の車両が存在すると推定された状態が所定の時間継続したとき、車線変更機能を無効にする。
【選択図】図10
特許請求の範囲
【請求項1】
移動体が走行する車線を変更する車線変更制御を実行可能な車線変更機能を有する制御装置であって、
前記移動体は、前記移動体の周辺の物体を検出可能な外界センサを備え、
前記制御装置は、
前記外界センサの検出結果に基づいて、前記移動体の周辺状況を認識する認識部と、
前記認識部によって認識された前記周辺状況に基づいて、前記車線変更制御を行う走行制御部と、
を備え、
前記走行制御部は、
前記車線変更機能が有効である場合に前記車線変更制御が実行可能となり、前記車線変更機能が無効である場合に前記車線変更制御が実行不能となるものであり、
前記車線変更機能が乗員の操作によって有効になった状態にて、
前記乗員の操作によらずに前記車線変更制御の要否判定を行い、前記移動体の前方に前記移動体よりも遅い速度の前走移動体が存在すると判定した場合には車線変更制御を行うと判定し、
前記認識部によって認識された周辺状況に基づいて前記車線変更制御の実行が不可と判定された場合は、前記車線変更制御を行うと判定していたとしても前記車線変更制御を制限し、
前記車線変更制御を制限している状態で、所定の第1時間が経過する前に前記認識部によって認識された周辺状況に基づいて前記車線変更制御の実行が可能と判定された場合は、前記車線変更制御の制限を解除し、
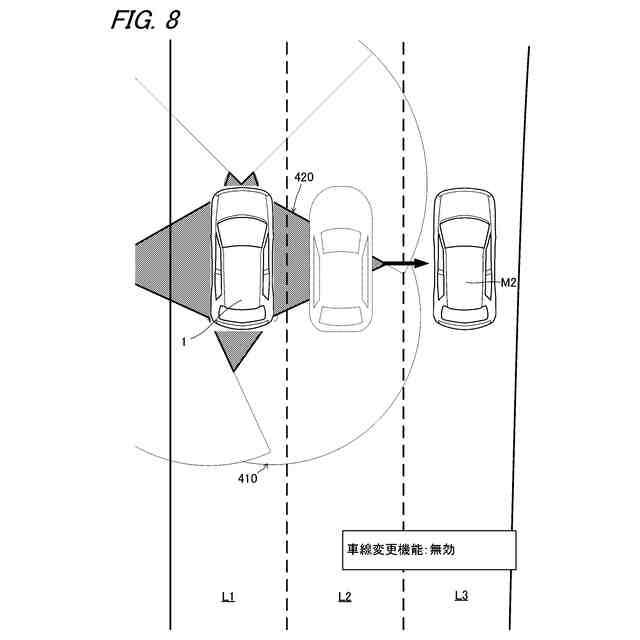
前記車線変更制御を制限している状態で、前記第1時間以上が経過した場合は、前記車線変更機能を無効とする、
制御装置。
続きを表示(約 780 文字)
【請求項2】
請求項1に記載の制御装置であって、
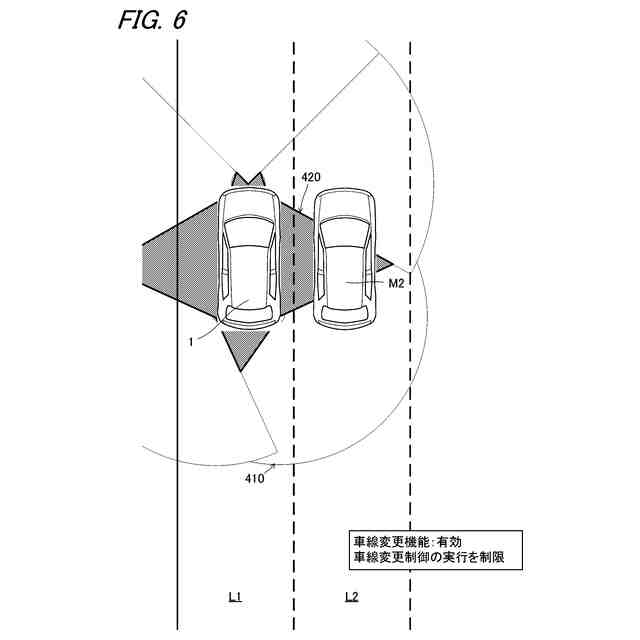
前記車線変更制御の制限は、前記認識部により前記移動体の側部且つ横方向に重なる位置に他の移動体が存在すると認識されている場合に行われ、
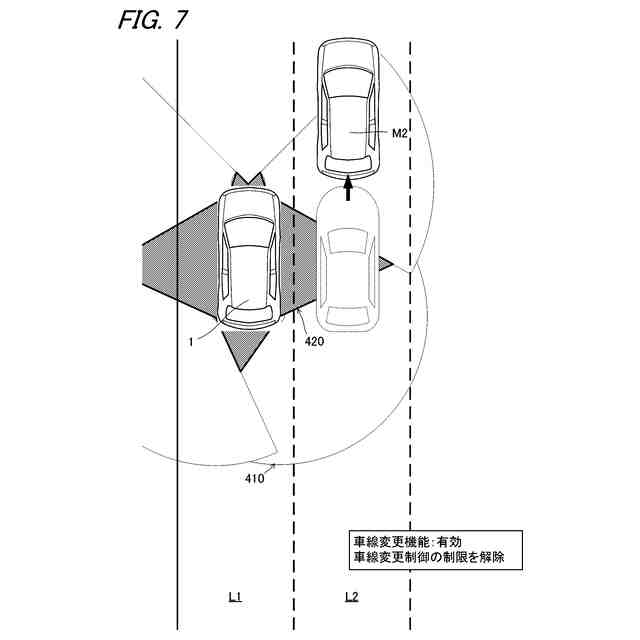
前記車線変更制御の制限の解除は、前記車線変更制御が制限されている状態で、前記第1時間が経過する前に前記認識部により前記移動体の前記側部且つ前記横方向に重なる位置に前記他の移動体が存在しないと判定される場合に行われる、
制御装置。
【請求項3】
請求項1又は2に記載の制御装置であって、
前記走行制御部は、
前記車線変更機能が無効である場合、前記移動体よりも遅い速度の前記前走移動体が存在したとしても前記車線変更制御の要否判定を行わない、
制御装置。
【請求項4】
請求項1又は2に記載の制御装置であって、
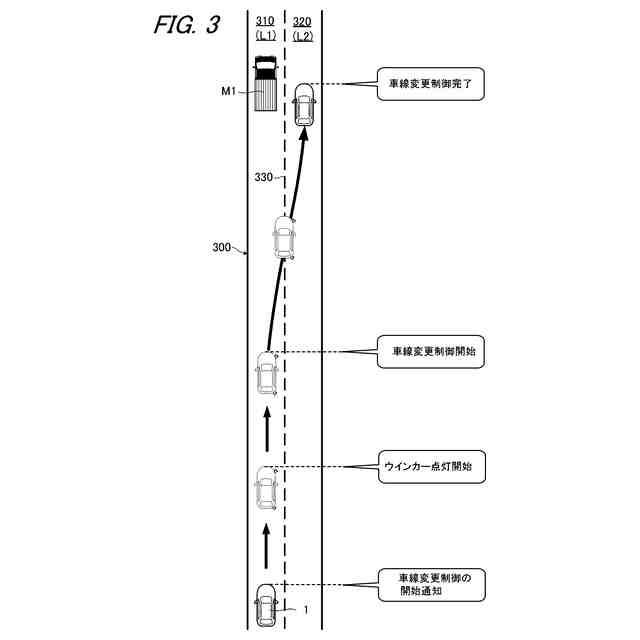
前記移動体の前記乗員に対する所定の通知を実行する通知制御部を更に備え、
前記通知制御部は、
前記車線変更機能が有効である状態で、前記移動体よりも遅い速度の前記前走移動体が存在すると判定し、且つ周辺状況に基づいて前記車線変更制御の実行可否を判定して前記車線変更制御の実行が可能と判定された場合に、前記乗員に前記車線変更制御を開始することを通知する開始通知を行う、
制御装置。
【請求項5】
請求項4に記載の制御装置であって、
前記通知制御部は、
前記開始通知と併せて、前記乗員に周辺の確認を促す通知を行う、
制御装置。
【請求項6】
請求項4に記載の制御装置であって、
前記制御装置は、
前記開始通知が開始されたときから所定の第2時間経過後にウインカーを点灯開始する、
制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体の車線変更制御を実行可能な制御装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
近年、交通参加者の中でも脆弱な立場にある人々にも配慮した持続可能な輸送システムへのアクセスを提供する取り組みが活発化している。この実現に向けて運転支援技術や自動運転技術に関する研究開発を通して交通の安全性や利便性をより一層改善する研究開発に注力している。
【0003】
運転支援技術の一例として、特許文献1には、車線変更を支援する制御を実行可能な走行支援装置が開示されている。特許文献1の走行支援装置は、カメラやレーザレーダ、ミリ波レーダ等のセンサを備え、外界を認識して走行支援を行う。
【先行技術文献】
【特許文献】
【0004】
特許第4366419号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
車両等の移動体の周辺には、外界センサによる物体の検出精度が他の領域と比べて相対的に低い特定領域が発生することがある。このような特定領域が存在する場合、制御装置による車線変更制御の実行可否の判断が困難な状態が継続することがあり、改善の余地があった。
【0006】
本発明は、車線変更制御の実行可否の判断が困難である状態が長時間継続することを抑制できる移動体の制御装置を提供する。そして、延いては持続可能な輸送システムの発展に寄与するものである。
【課題を解決するための手段】
【0007】
本発明は、
移動体が走行する車線を変更する車線変更制御を実行可能な車線変更機能を有する制御装置であって、
前記移動体は、前記移動体の周辺の物体を検出可能な外界センサを備え、
前記制御装置は、
前記外界センサの検出結果に基づいて、前記移動体の周辺状況を認識する認識部と、
前記認識部によって認識された前記周辺状況に基づいて、前記車線変更制御を行う走行制御部と、
を備え、
前記走行制御部は、
前記車線変更機能が有効である場合に前記車線変更制御が実行可能となり、前記車線変更機能が無効である場合に前記車線変更制御が実行不能となるものであり、
前記車線変更機能が乗員の操作によって有効になった状態にて、
前記乗員の操作によらずに前記車線変更制御の要否判定を行い、前記移動体の前方に前記移動体よりも遅い速度の前走移動体が存在すると判定した場合には車線変更制御を行うと判定し、
前記認識部によって認識された周辺状況に基づいて前記車線変更制御の実行が不可と判定された場合は、前記車線変更制御を行うと判定していたとしても前記車線変更制御を制限し、
前記車線変更制御を制限している状態で、所定の第1時間が経過する前に前記認識部によって認識された周辺状況に基づいて前記車線変更制御の実行が可能と判定された場合は、前記車線変更制御の制限を解除し、
前記車線変更制御を制限している状態で、前記第1時間以上が経過した場合は、前記車線変更機能を無効とする。
【発明の効果】
【0008】
本発明によれば、車線変更制御の実行可否の判断が困難である状態が長時間継続することを抑制できる。
【図面の簡単な説明】
【0009】
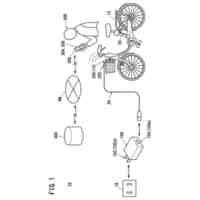
車両1に搭載される車両システム10の全体構成を示すブロック図である。
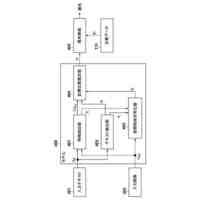
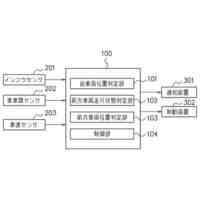
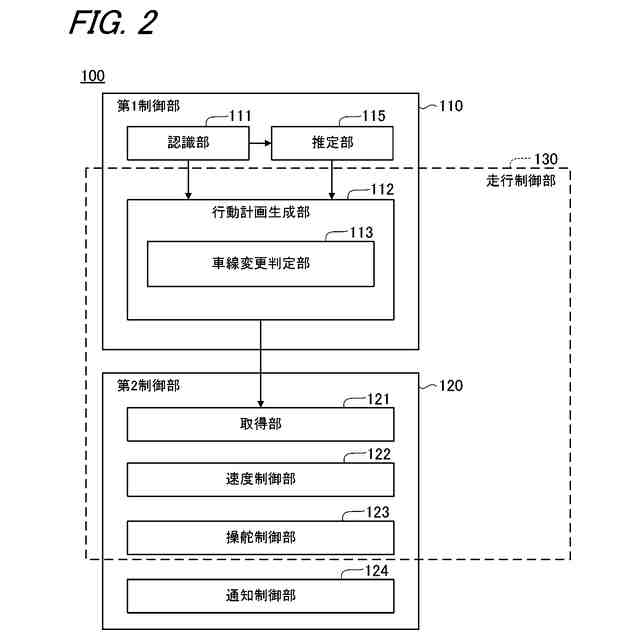
制御装置100の構成の一例を示す図である。
車線変更制御による車両1の車線変更動作の一例を示す図である。
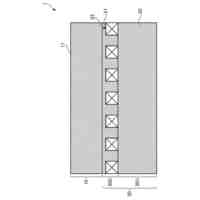
車両1の周囲における検出領域410と検出困難領域420とを模式的に示した図である。
他の車両M2が車両1の検出領域410に存在する様子を示す図である。
他の車両M2が車両1の検出困難領域420に進入した様子を示す図である。
検出困難領域420に存在していた他の車両M2が検出領域410に移動した様子を示す図である。
検出困難領域420に存在していた他の車両M2が外界センサ11により検出されることなく検出困難領域420の外側に移動した様子を示す図である。
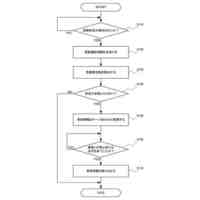
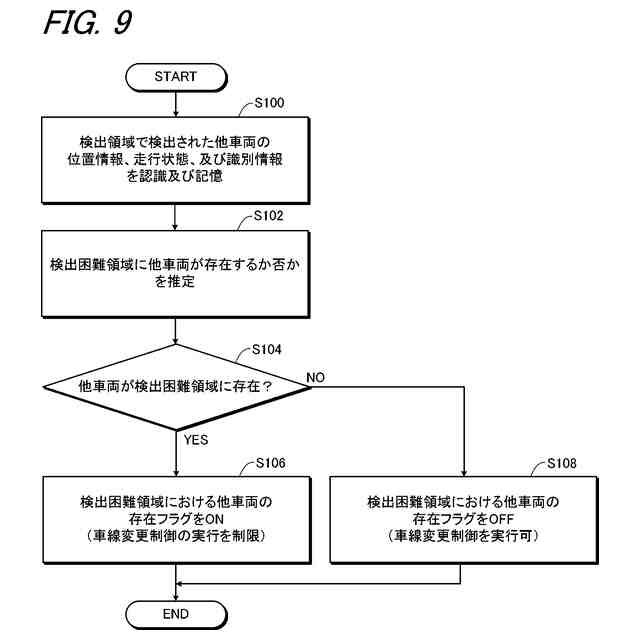
制御装置100による検出困難領域420に他の車両が存在するか否かを推定する処理の一例を示すフローチャートである。
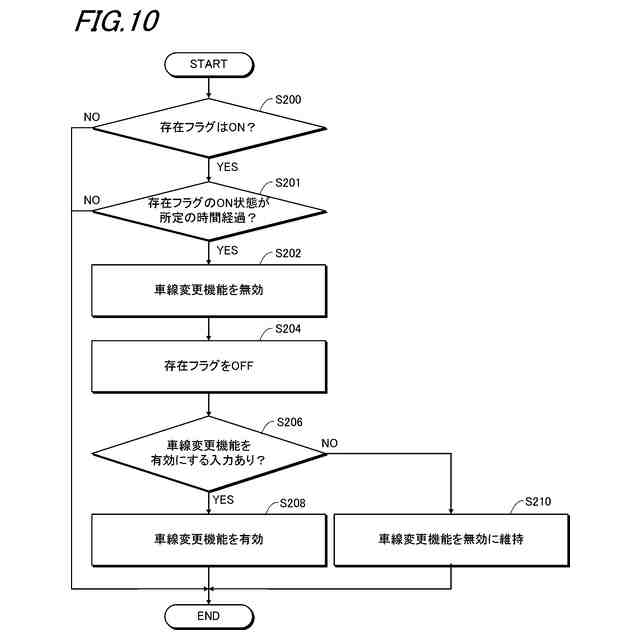
右側検出困難領域420R及び左側検出困難領域420Lのうち少なくとも一方における他の車両の存在フラグがONとなったときに制御装置100が実行する処理の一例を示すフローチャートである。
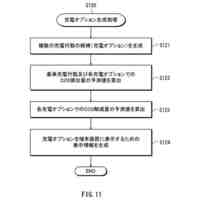
制御装置100が車線変更制御を実行するときの処理の一例を示すフローチャートである。
図11のフローチャートの続きである。
検出困難領域420における他の車両の存在フラグがONとなったときに制御装置100が実行する処理の変形例を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、本発明の一実施形態の移動体の制御装置を、添付図面に基づいて説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
車両
1か月前
本田技研工業株式会社
冷却液タンク
1日前
本田技研工業株式会社
蓄電システム
3日前
本田技研工業株式会社
差圧式電解装置
1か月前
本田技研工業株式会社
回転電機用ロータ
10日前
本田技研工業株式会社
駆動装置ユニット
1か月前
本田技研工業株式会社
電動無段変速装置
1か月前
本田技研工業株式会社
回転電機のロータ
1か月前
本田技研工業株式会社
スポット溶接方法
23日前
本田技研工業株式会社
再生正極の製造方法
1か月前
本田技研工業株式会社
非接触電力伝送システム
3日前
本田技研工業株式会社
金属シリコンの製造方法
10日前
本田技研工業株式会社
積層体、積層体の製造方法
2日前
本田技研工業株式会社
電力変換装置、および車両
2日前
本田技研工業株式会社
給電システムおよび給電方法
1か月前
本田技研工業株式会社
制御装置、および、制御方法
23日前
本田技研工業株式会社
情報処理方法及びプログラム
22日前
本田技研工業株式会社
負極、固体電池及び積層体の製造方法
1か月前
本田技研工業株式会社
正極、固体電池及び固体電池の製造方法
1か月前
本田技研工業株式会社
二酸化炭素回収装置及び二酸化炭素回収方法
1か月前
本田技研工業株式会社
情報処理装置、情報処理方法、およびプログラム
22日前
本田技研工業株式会社
制御装置
24日前
本田技研工業株式会社
作動装置
22日前
本田技研工業株式会社
学習装置、推定装置、学習方法、推定方法及びプログラム
1か月前
本田技研工業株式会社
移動体の制御装置、移動体の制御方法、およびプログラム
17日前
本田技研工業株式会社
車両、制御方法、プログラム、記憶媒体、及び情報処理装置
22日前
本田技研工業株式会社
電池の充電状態の補正方法、電池均等化方法、端末機器及び車両
9日前
本田技研工業株式会社
移動体支援装置および移動体システム
1か月前
本田技研工業株式会社
移動体制御システム、情報処理装置、移動体制御システムのための方法、機械学習モデルを生成する方法
1か月前
本田技研工業株式会社
熱媒体組み合わせ最適化装置、熱媒体組み合わせ最適化方法、および、熱媒体組み合わせ最適化プログラム
10日前
日本精機株式会社
警報システム
2か月前
個人
安全支援装置
24日前
個人
自動電動車椅子
2か月前
株式会社SUBARU
車両
1か月前
スズキ株式会社
運転支援装置
2か月前
エムケー精工株式会社
車両誘導装置
3か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ