TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025168935
公報種別
公開特許公報(A)
公開日
2025-11-12
出願番号
2024073815
出願日
2024-04-30
発明の名称
移動体の制御装置、移動体の制御方法、およびプログラム
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/243 20240101AFI20251105BHJP(制御;調整)
要約
【課題】ロボットが障害物に過度に接近することを防ぎつつ経路生成を行うこと。
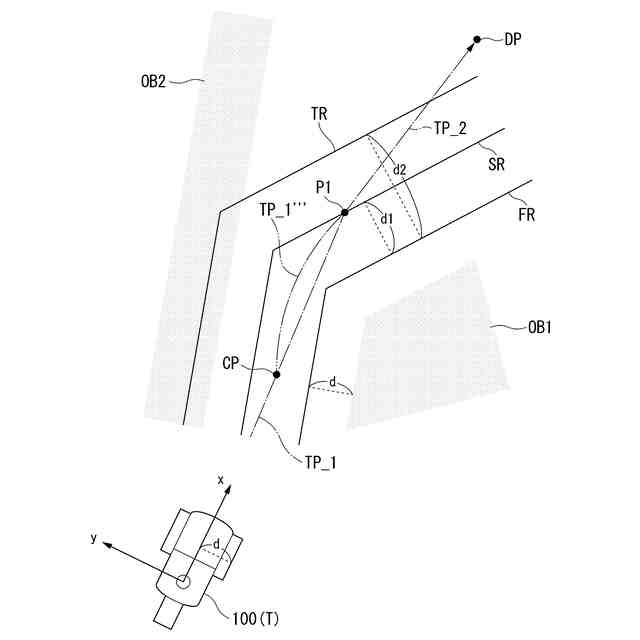
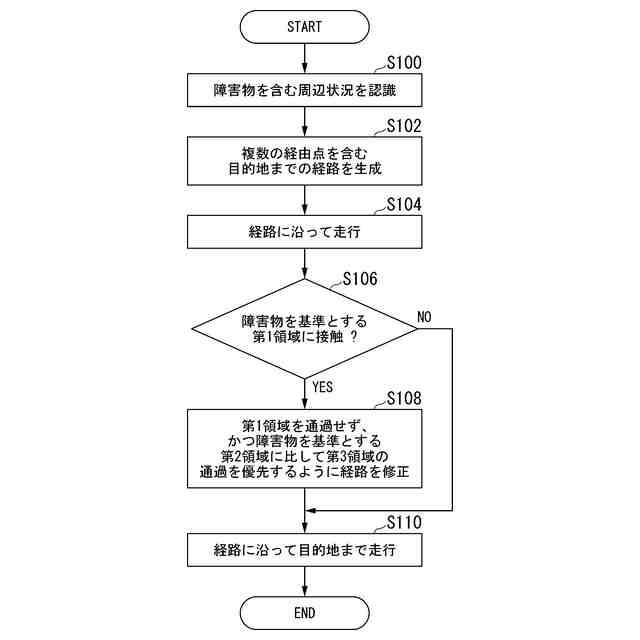
【解決手段】移動体の周辺状況が撮像された画像に少なくとも基づいて、前記移動体の周辺状況を認識する認識部と、認識された前記周辺状況と、設定された目的地とに基づいて、前記移動体から前記目的地までの経路であって、前記移動体によって通過される経由地点によって構成される経路を生成する生成部と、生成された前記経路に沿って前記経由地点を経由して前記目的地まで前記移動体が移動するように前記移動体を制御する制御部と、を備え、前記生成部は、前記周辺状況が障害物を含む場合、前記障害物を基準とする第1領域と、前記障害物を基準として前記第1領域よりも外側に位置する第2領域と、前記障害物を基準として前記第2領域よりも外側に位置する第3領域との少なくともいずれかと前記経路に基づいて、前記経路の修正を行うか否かを決定する、移動体の制御装置。
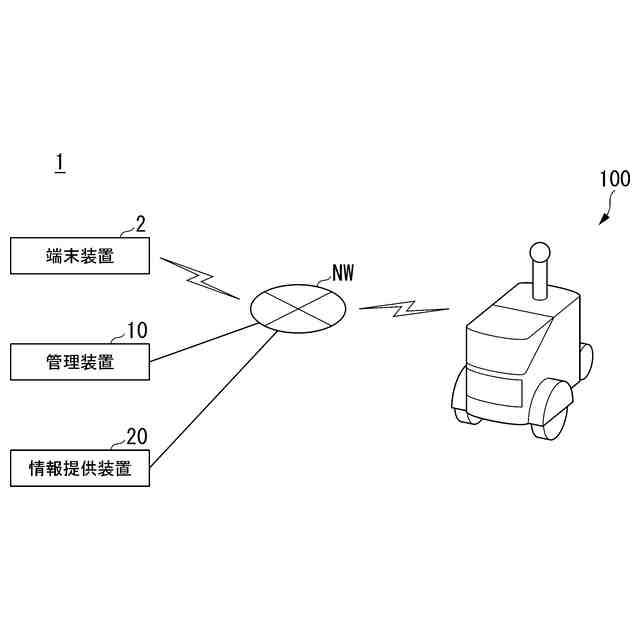
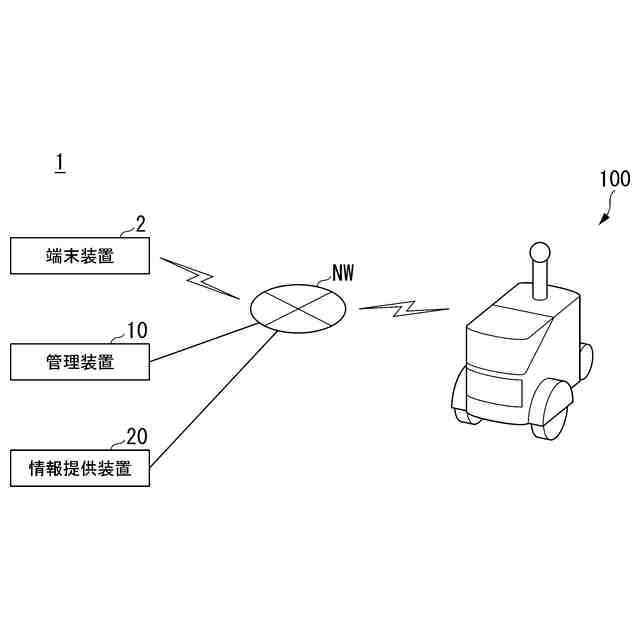
【選択図】図1
特許請求の範囲
【請求項1】
移動体の周辺状況が撮像された画像に少なくとも基づいて、前記移動体の周辺状況を認識する認識部と、
認識された前記周辺状況と、設定された目的地とに基づいて、前記移動体から前記目的地までの経路であって、前記移動体によって通過される経由地点によって構成される経路を生成する生成部と、
生成された前記経路に沿って前記経由地点を経由して前記目的地まで前記移動体が移動するように前記移動体を制御する制御部と、を備え、
前記生成部は、前記周辺状況が障害物を含む場合、前記障害物を基準とする第1領域と、前記障害物を基準として前記第1領域よりも外側に位置する第2領域と、前記障害物を基準として前記第2領域よりも外側に位置する第3領域との少なくともいずれかと前記経路に基づいて、前記経路の修正を行うか否かを決定する、
移動体の制御装置。
続きを表示(約 1,400 文字)
【請求項2】
前記生成部は、前記移動体が前記経路に沿って移動中、前記第1領域に接触した場合に、前記経路を修正すると決定する、
請求項1に記載の移動体の制御装置。
【請求項3】
前記生成部は、前記移動体が前記経路に沿って移動したという仮定の下、前記第1領域に接触すると判定された場合に、前記経路を修正すると決定する、
請求項1に記載の移動体の制御装置。
【請求項4】
前記生成部は、前記第1領域を通過せず、かつ前記第2領域に比して前記第3領域の通過を優先するように前記経路を修正する、
請求項1に記載の移動体の制御装置。
【請求項5】
前記生成部は、前記第3領域が他の障害物を含む場合であっても、前記第2領域が前記他の障害物を含まない場合、前記第1領域を通過せず、前記第2領域を通過するように前記経路を修正する、
請求項1に記載の移動体の制御装置。
【請求項6】
前記第1領域は、前記障害物を表す領域を、前記移動体の半径分、膨張させた領域である、
請求項1から5のいずれか1項に記載の移動体の制御装置。
【請求項7】
前記第2領域は、前記障害物を表す領域を、前記移動体の半径に第1所定距離を加えた分、膨張させた領域である、
請求項1から5のいずれか1項に記載の移動体の制御装置。
【請求項8】
前記第3領域は、前記障害物を表す領域を、前記移動体の半径に、前記第1所定距離以上である第2所定距離を加えた分、膨張させた領域である、
請求項7に記載の移動体の制御装置。
【請求項9】
コンピュータが、
移動体の周辺状況が撮像された画像に少なくとも基づいて、前記移動体の周辺状況を認識し、
認識された前記周辺状況と、設定された目的地とに基づいて、前記移動体から前記目的地までの経路であって、前記移動体によって通過される経由地点によって構成される経路を生成し、
生成された前記経路に沿って前記経由地点を経由して前記目的地まで前記移動体が移動するように前記移動体を制御し、
前記周辺状況が障害物を含む場合、前記障害物を基準とする第1領域と、前記障害物を基準として前記第1領域よりも外側に位置する第2領域と、前記障害物を基準として前記第2領域よりも外側に位置する第3領域との少なくともいずれかと前記経路に基づいて、前記経路の修正を行うか否かを決定する、
移動体の制御方法。
【請求項10】
コンピュータに、
移動体の周辺状況が撮像された画像に少なくとも基づいて、前記移動体の周辺状況を認識させ、
認識された前記周辺状況と、設定された目的地とに基づいて、前記移動体から前記目的地までの経路であって、前記移動体によって通過される経由地点によって構成される経路を生成させ、
生成された前記経路に沿って前記経由地点を経由して前記目的地まで前記移動体が移動するように前記移動体を制御させ、
前記周辺状況が障害物を含む場合、前記障害物を基準とする第1領域と、前記障害物を基準として前記第1領域よりも外側に位置する第2領域と、前記障害物を基準として前記第2領域よりも外側に位置する第3領域との少なくともいずれかと前記経路に基づいて、前記経路の修正を行うか否かを決定させる、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体の制御装置、移動体の制御方法、およびプログラムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
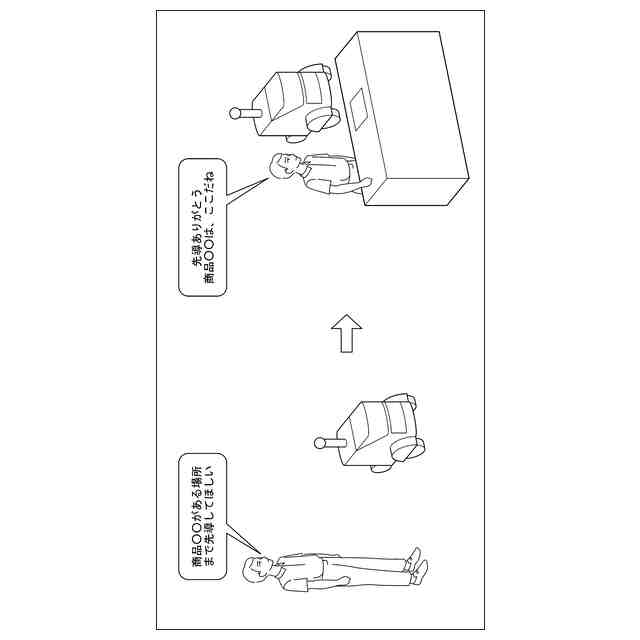
従来、ユーザを所望の場所に案内したり、荷物を搬送したりするロボットが知られている(例えば、特許文献1参照)。上記のロボットは、最大移動速度と、環境内の各エリアのそれぞれとを対応づけた移動速度データベースを参照して、設定した最大移動速度を上限とした移動速度となるように移動するものである。
【先行技術文献】
【特許文献】
【0003】
特開2012-111011号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
一般的に、従来技術のロボットは、目的地に向けた経路を生成する際に、複数の経由地点を生成し、これら経由地点を連結することによって経路を生成するものである。その後、ロボットは、これら経由地点を通過しつつ、目的地に向けて走行する。しかしながら、従来技術では、ロボットを、体積を有しない質点と見なして経路生成を行うため、ロボットが障害物に過度に接近する場合があった。
【0005】
本発明は、このような事情を考慮してなされたものであり、ロボットが障害物に過度に接近することを防ぎつつ経路生成を行うことができる移動体の制御装置、移動体の制御方法、およびプログラムを提供することを目的の一つとする。
【課題を解決するための手段】
【0006】
この発明に係る移動体の制御装置、移動体の制御方法、およびプログラムは、以下の構成を採用した。
(1):この発明の一態様に係る移動体の制御装置は、移動体の周辺状況が撮像された画像に少なくとも基づいて、前記移動体の周辺状況を認識する認識部と、認識された前記周辺状況と、設定された目的地とに基づいて、前記移動体から前記目的地までの経路であって、前記移動体によって通過される経由地点によって構成される経路を生成する生成部と、生成された前記経路に沿って前記経由地点を経由して前記目的地まで前記移動体が移動するように前記移動体を制御する制御部と、を備え、前記生成部は、前記周辺状況が障害物を含む場合、前記障害物を基準とする第1領域と、前記障害物を基準として前記第1領域よりも外側に位置する第2領域と、前記障害物を基準として前記第2領域よりも外側に位置する第3領域との少なくともいずれかと前記経路に基づいて、前記経路の修正を行うか否かを決定する、移動体の制御装置。
【0007】
(2):上記(1)の態様において、前記生成部は、前記移動体が前記経路に沿って移動中、前記第1領域に接触した場合に、前記経路を修正すると決定するものである。
【0008】
(3):上記(1)の態様において、前記生成部は、前記移動体が前記経路に沿って移動したという仮定の下、前記第1領域に接触すると判定された場合に、前記経路を修正すると決定するものである。
【0009】
(4):上記(1)の態様において、前記生成部は、前記第1領域を通過せず、かつ前記第2領域に比して前記第3領域の通過を優先するように前記経路を生成するものである。
【0010】
(5):上記(1)の態様において、前記生成部は、前記第3領域が他の障害物を含む場合であっても、前記第2領域が前記他の障害物を含まない場合、前記第1領域を通過せず、前記第2領域を通過するように前記経路を生成するものである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
車両
1か月前
本田技研工業株式会社
車両
1か月前
本田技研工業株式会社
車両
1か月前
本田技研工業株式会社
飛行体
1日前
本田技研工業株式会社
固体電池
1か月前
本田技研工業株式会社
排気装置
1か月前
本田技研工業株式会社
除草装置
1か月前
本田技研工業株式会社
排気装置
1か月前
本田技研工業株式会社
排気装置
1か月前
本田技研工業株式会社
発電セル
1か月前
本田技研工業株式会社
触媒装置
1か月前
本田技研工業株式会社
二次電池
1か月前
本田技研工業株式会社
固体電池
1か月前
本田技研工業株式会社
回転電機
3日前
本田技研工業株式会社
鞍乗型車両
1か月前
本田技研工業株式会社
灯火器構造
1日前
本田技研工業株式会社
電極積層体
1か月前
本田技研工業株式会社
全固体電池
1か月前
本田技研工業株式会社
全固体電池
1か月前
本田技研工業株式会社
リアクトル
1か月前
本田技研工業株式会社
電動船外機
1か月前
本田技研工業株式会社
鞍乗型車両
1か月前
本田技研工業株式会社
電池製造装置
1か月前
本田技研工業株式会社
鞍乗り型車両
1か月前
本田技研工業株式会社
始動制御装置
1か月前
本田技研工業株式会社
燃料電池装置
1か月前
本田技研工業株式会社
始動制御装置
1か月前
本田技研工業株式会社
冷却液タンク
8日前
本田技研工業株式会社
燃料電池構造
1か月前
本田技研工業株式会社
車両制御装置
1か月前
本田技研工業株式会社
蓄電システム
10日前
本田技研工業株式会社
差圧式電解装置
1か月前
本田技研工業株式会社
電池モジュール
1か月前
本田技研工業株式会社
電池モジュール
1か月前
本田技研工業株式会社
回転電機のロータ
1か月前
本田技研工業株式会社
回転電機用ロータ
17日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ