TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025154020
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024056788
出願日
2024-03-29
発明の名称
車両制御装置
出願人
本田技研工業株式会社
代理人
弁理士法人航栄事務所
主分類
G08G
1/16 20060101AFI20251002BHJP(信号)
要約
【課題】車両において衝突抑制制御を適切に実行することを可能とする。
【解決手段】制御装置30は、車両1が備える外界センサによって取得された外界情報に基づいて、車両周辺に存在する物体を認識する認識部33と、車両周辺を移動する交通参加者が物体として認識された場合に、交通参加者の移動軌道を予測する第1予測部34と、車両1の移動軌道である自車移動軌道を予測する第2予測部35と、交通参加者の移動軌道と自車移動軌道とが交差する場合に、交通参加者の停止位置を予測し、予測された停止位置に基づいて、車両が交通参加者と衝突する可能性があると判断した場合に衝突抑制制御を実行する衝突抑制制御部36と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
車両を制御する車両制御装置であって、
前記車両が備える外界センサによって取得された前記車両の周辺情報に基づいて、前記車両周辺に存在する物体を認識する認識部と、
前記車両周辺を移動する交通参加者が前記物体として認識された場合に、当該交通参加者の移動軌道を予測する第1予測部と、
前記車両の移動軌道である自車移動軌道を予測する第2予測部と、
予測された前記交通参加者の移動軌道と前記自車移動軌道とに基づいて、衝突抑制制御を実行する衝突抑制制御部と、
を備え、
前記衝突抑制制御部は、
前記交通参加者の中の一の交通参加者の前記移動軌道である一の移動軌道と前記自車移動軌道とが交差する場合に、前記一の移動軌道と前記自車移動軌道とが交差する第1ポイントより先の前記一の移動軌道上に障害物が存在するか否かを判断し、
前記障害物が存在すると判断した場合に、当該障害物の位置と前記一の移動軌道とに基づいて、前記一の交通参加者の停止位置を予測し、
予測された前記停止位置に基づいて、前記車両が前記一の交通参加者と衝突する可能性があると判断した場合に、前記衝突抑制制御を実行する、
車両制御装置。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載の車両制御装置であって、
前記衝突抑制制御部は、
前記交通参加者の中の他の交通参加者の前記移動軌道である他の移動軌道と前記一の移動軌道とが交差する第2ポイントが前記第1ポイントより先の前記一の移動軌道上に存在する場合に、前記障害物が存在すると判断し、
前記第2ポイントが存在することにより前記障害物が存在すると判断した場合に、前記第2ポイントと前記一の移動軌道とに基づいて、前記停止位置を予測する、
車両制御装置。
【請求項3】
請求項1に記載の車両制御装置であって、
前記衝突抑制制御部は、
前記障害物が存在しないと判断した場合には、前記一の交通参加者の現在位置に基づいて、前記車両が前記一の交通参加者と衝突する可能性があると判断した場合に、前記衝突抑制制御を実行する、
車両制御装置。
【請求項4】
請求項1に記載の車両制御装置であって、
前記衝突抑制制御部は、
前記停止位置が前記自車移動軌道と重なる場合に、前記停止位置に基づいて、前記車両が前記一の交通参加者と衝突する可能性があると判断すると、前記衝突抑制制御を実行する、
車両制御装置。
【請求項5】
請求項4に記載の車両制御装置であって、
前記衝突抑制制御部は、
前記停止位置が前記自車移動軌道と重なる箇所において前記車両が走行する車線の幅から、前記停止位置と重なる部分を引いた距離が所定値以下である場合に、前記停止位置に基づいて、前記車両が前記一の交通参加者と衝突する可能性があると判断すると、前記衝突抑制制御を実行する、
車両制御装置。
【請求項6】
請求項5に記載の車両制御装置であって、
前記所定値は、前記車両の車幅方向の寸法に基づいて設定される、
車両制御装置。
【請求項7】
請求項1に記載の車両制御装置であって、
前記衝突抑制制御は、前記車両を減速させる減速制御、および/または、前記車両が備える報知装置を介して前記車両の乗員に対して所定の報知を行う報知制御を含む、
車両制御装置。
【請求項8】
請求項1に記載の車両制御装置であって、
前記衝突抑制制御部は、さらに、
前記一の移動軌道と前記自車移動軌道とが交差し、且つ、前記一の交通参加者が前記第1ポイントに到達してから所定時間以内に前記車両が前記第1ポイントに到達すると予測される場合に、前記衝突抑制制御を実行する、
車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両制御装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
近年、脆弱な立場にある交通参加者にも配慮した持続可能な輸送システムへのアクセスを提供するための取り組みが活発化している。この取り組みの1つとして、交通の安全性や利便性を改善すべく、移動体(例えば自動車などの車両)における運転支援技術や自動運転技術に関する研究開発が行われている。
【0003】
運転支援技術の1つに、例えば、車両が障害物と衝突する可能性があると判断された場合に、車両を減速させる減速制御、および/または車両の乗員に対して所定の警報を行う衝突抑制制御(「CMBS(Collision Mitigation Brake System)」とも称される)がある。
【0004】
下記特許文献1には、対向車線を走行する対向車両の速度が停止状態を判定するための判定速度以下であるという第1条件と、対向車両について予測される進路が自車両の進路に対して交わるという第2条件との両方が満たされる第1対向車両を特定し、対向車線においてその第1対向車両よりも後方を走行する第2対向車両が存在すると判断した場合には、第1対向車両に対して進路を譲るための車両制御を行う一方、第2対向車両が存在しないと判断した場合には、上記の車両制御を行わないようにした技術が開示されている。
【先行技術文献】
【特許文献】
【0005】
特開2021-064033号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記従来技術にあっては、車両において衝突抑制制御を適切に実行する観点から、改善の余地があった。
【0007】
本発明は、車両において衝突抑制制御を適切に実行することを可能とし、車両の安全性の向上を図れる車両制御装置を提供する。そして、延いては、交通の安全性を改善し、持続可能な輸送システムの発展に寄与するものである。
【課題を解決するための手段】
【0008】
本発明の一態様は、
車両を制御する車両制御装置であって、
前記車両が備える外界センサによって取得された前記車両の周辺情報に基づいて、前記車両周辺に存在する物体を認識する認識部と、
前記車両周辺を移動する交通参加者が前記物体として認識された場合に、当該交通参加者の移動軌道を予測する第1予測部と、
前記車両の移動軌道である自車移動軌道を予測する第2予測部と、
予測された前記交通参加者の移動軌道と前記自車移動軌道とに基づいて、衝突抑制制御を実行する衝突抑制制御部と、
を備え、
前記衝突抑制制御部は、
前記交通参加者の中の一の交通参加者の前記移動軌道である一の移動軌道と前記自車移動軌道とが交差する場合に、前記一の移動軌道と前記自車移動軌道とが交差する第1ポイントより先の前記一の移動軌道上に障害物が存在するか否かを判断し、
前記障害物が存在すると判断した場合に、当該障害物の位置と前記一の移動軌道とに基づいて、前記一の交通参加者の停止位置を予測し、
予測された前記停止位置に基づいて、前記車両が前記一の交通参加者と衝突する可能性があると判断した場合に、前記衝突抑制制御を実行する、
車両制御装置である。
【発明の効果】
【0009】
本発明によれば、車両において衝突抑制制御を適切に実行することを可能とし、車両の安全性の向上を図れる車両制御装置を提供できる。
【図面の簡単な説明】
【0010】
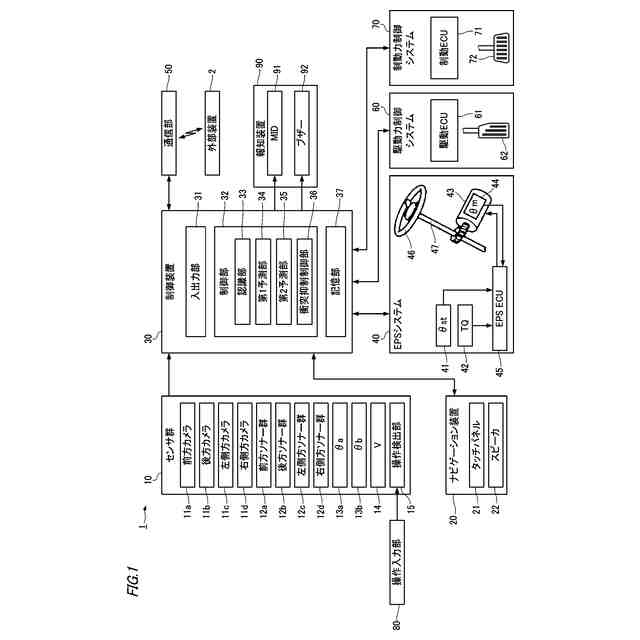
図1は、本発明の車両制御装置の一実施形態である制御装置30によって制御される車両1を示す図である。
図2は、制御装置30による衝突抑制制御の作動コンセプトの一例を示す図である。
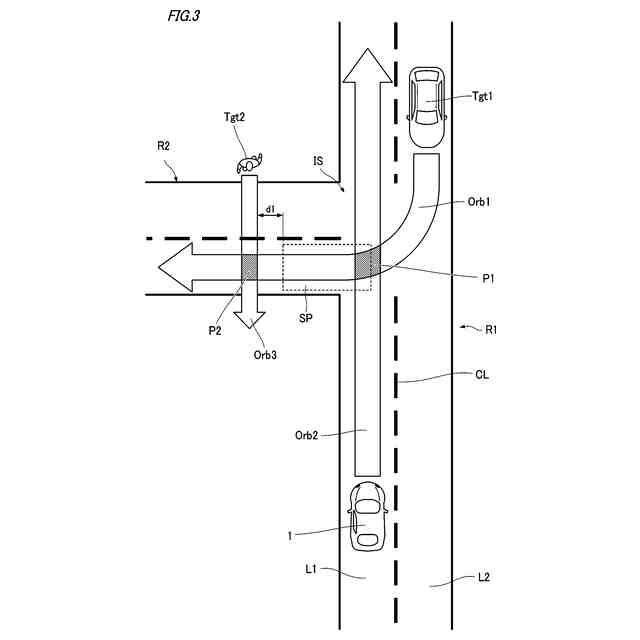
図3は、車両1の動作の第1例を示す図である。
図4は、図3に示した第1例における車両1のより詳細な動作の一例を示すタイミングチャートである。
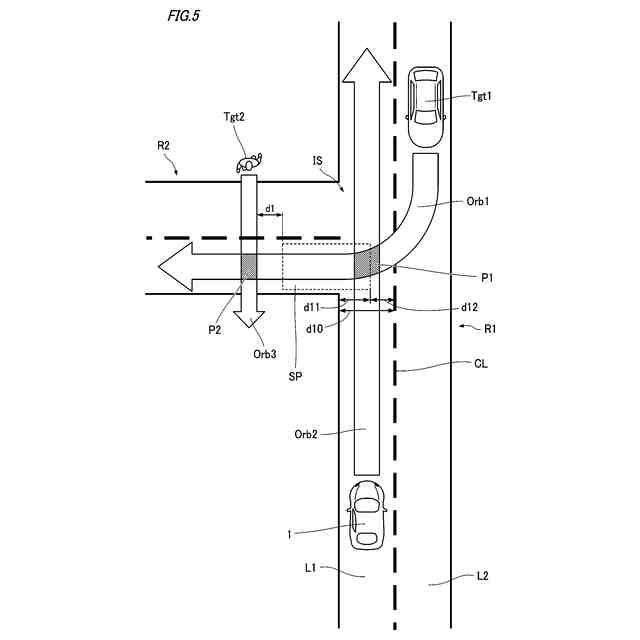
図5は、車両1の動作の第2例および第3例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
車両
1か月前
本田技研工業株式会社
車両
1か月前
本田技研工業株式会社
車両
1か月前
本田技研工業株式会社
車両
1か月前
本田技研工業株式会社
車両
1か月前
本田技研工業株式会社
固体電池
1か月前
本田技研工業株式会社
排気装置
1か月前
本田技研工業株式会社
触媒装置
1か月前
本田技研工業株式会社
エンジン
1か月前
本田技研工業株式会社
制御装置
1か月前
本田技研工業株式会社
発電セル
1か月前
本田技研工業株式会社
電気機器
1か月前
本田技研工業株式会社
内燃機関
1か月前
本田技研工業株式会社
固体電池
1か月前
本田技研工業株式会社
二次電池
1か月前
本田技研工業株式会社
収容装置
1か月前
本田技研工業株式会社
排気装置
1か月前
本田技研工業株式会社
電気機器
1か月前
本田技研工業株式会社
排気装置
1か月前
本田技研工業株式会社
除草装置
1か月前
本田技研工業株式会社
清掃装置
1か月前
本田技研工業株式会社
電気部品
1か月前
本田技研工業株式会社
鞍乗型車両
1か月前
本田技研工業株式会社
電動船外機
1か月前
本田技研工業株式会社
リアクトル
1か月前
本田技研工業株式会社
全固体電池
1か月前
本田技研工業株式会社
鞍乗型車両
1か月前
本田技研工業株式会社
電極積層体
1か月前
本田技研工業株式会社
全固体電池
1か月前
本田技研工業株式会社
鞍乗型車両
1か月前
本田技研工業株式会社
樹脂成型品
1か月前
本田技研工業株式会社
移動システム
1か月前
本田技研工業株式会社
遊戯システム
1か月前
本田技研工業株式会社
鞍乗り型車両
1か月前
本田技研工業株式会社
車両制御装置
1か月前
本田技研工業株式会社
作業システム
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ