TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025138303
公報種別
公開特許公報(A)
公開日
2025-09-25
出願番号
2024037316
出願日
2024-03-11
発明の名称
車両制御装置
出願人
本田技研工業株式会社
代理人
弁理士法人航栄事務所
主分類
B60W
30/10 20060101AFI20250917BHJP(車両一般)
要約
【課題】自車線の車線中央ラインに対して車両が左右にふらつくのを抑制しつつ、適切な目標走行ラインに沿って車両が走行するように車両の操舵を制御する。
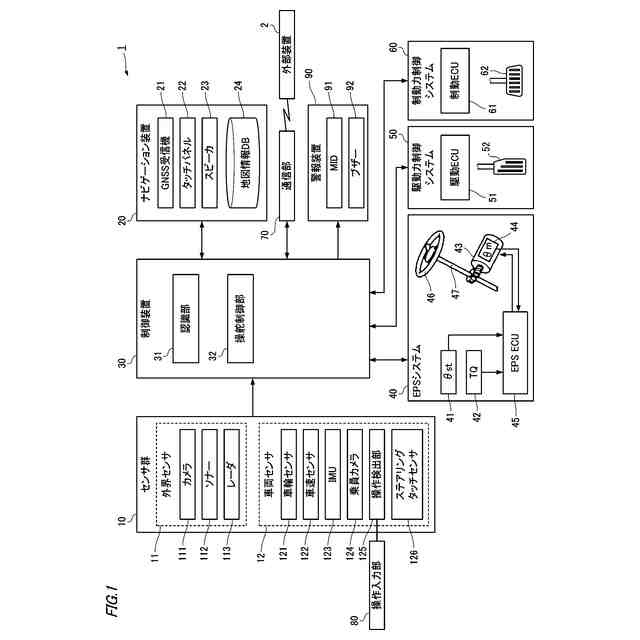
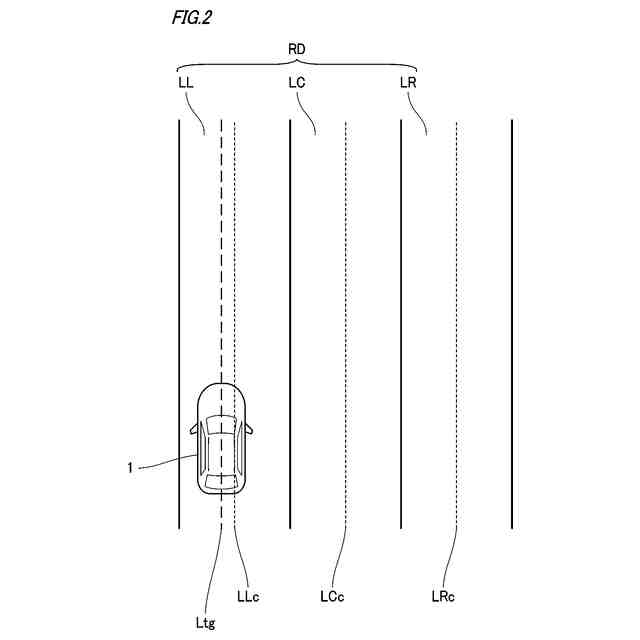
【解決手段】制御装置30は、車両1が走行する自車線と、自車線を有する道路とを含む車両1の周辺状況を認識する認識部31と、認識部31によって認識された周辺状況に基づき、自車線における車両1の目標走行ラインを設定し、当該目標走行ラインに沿って車両1が走行するように車両1の操舵を制御する操舵制御部32と、を備える。操舵制御部32は、自車線を有する道路にて、自車線に隣接する他車線を有する場合に、自車線の車線中央ラインから左方又は右方へ所定のオフセット量だけオフセットしたラインを目標走行ラインとして設定する。
【選択図】図1
特許請求の範囲
【請求項1】
車両を制御する車両制御装置であって、
前記車両が走行する自車線と、当該自車線を有する道路とを含む前記車両の周辺状況を認識する認識部と、
前記認識部によって認識された前記周辺状況に基づき、前記自車線における前記車両の目標走行ラインを設定し、当該目標走行ラインに沿って前記車両が走行するように前記車両の操舵を制御する操舵制御部と、
を備え、
前記操舵制御部は、
前記道路にて、前記自車線に隣接する他車線を有する場合に、前記自車線の車線中央ラインから左方又は右方へ所定のオフセット量だけオフセットしたラインを前記目標走行ラインとして設定可能に構成される、
車両制御装置。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の車両制御装置であって、
前記操舵制御部は、前記自車線の左右の一方側に前記他車線が存在する場合に、前記車線中央ラインから左右の他方側へ前記オフセット量だけオフセットしたラインを前記目標走行ラインとして設定する、
車両制御装置。
【請求項3】
請求項2に記載の車両制御装置であって、
前記操舵制御部は、前記自車線の前記一方側に前記他車線が2車線以上存在する場合に、前記自車線の前記一方側に存在する前記他車線が1車線の場合と比べて、前記オフセット量を大きくする、
車両制御装置。
【請求項4】
請求項2に記載の車両制御装置であって、
前記他車線は、走行する車両の進行方向が前記自車線と同一の車線であり、
前記操舵制御部は、前記自車線の前記一方側に前記他車線が存在し、且つ、前記自車線の前記他方側に前記自車線の対向車線が存在する場合に、当該対向車線が存在しない場合と比べて、前記オフセット量を小さくする、
車両制御装置。
【請求項5】
請求項2に記載の車両制御装置であって、
前記操舵制御部は、前記自車線の前記一方側に前記他車線が存在し、且つ、前記自車線の前記他方側に、前記車両が進入可能な進入可能領域が前記自車線に隣接して存在する場合に、当該進入可能領域が存在しない場合と比べて、前記オフセット量を大きくする、
車両制御装置。
【請求項6】
請求項2に記載の車両制御装置であって、
前記認識部は、前記車両の周辺に存在する他車両をさらに含む前記周辺状況を認識し、
前記操舵制御部は、前記自車線の前記一方側に前記他車線が存在し、且つ、前記自車線を走行する前記他車両が相対的に少ない場合に、当該他車両が相対的に多い場合と比べて、前記オフセット量を小さくする、
車両制御装置。
【請求項7】
請求項2に記載の車両制御装置であって、
前記操舵制御部は、前記自車線の左右の両側に前記他車線が存在する場合に、前記車線中央ラインを前記目標走行ラインとして設定可能に構成される、
車両制御装置。
【請求項8】
請求項1又は2に記載の車両制御装置であって、
前記操舵制御部は、前記他車線を前記道路が有し、且つ、前記自車線の幅員が所定値以上の場合に、前記車線中央ラインから左方又は右方へオフセットしたラインを前記目標走行ラインとして設定可能である、
車両制御装置。
【請求項9】
請求項1又は2に記載の車両制御装置であって、
前記操舵制御部は、前記車線中央ラインから左方又は右方へオフセットした前記目標走行ラインに沿って前記車両が走行するように前記車両の操舵を制御しているときに、曲率が所定値以上の区間に前記車両が近づくと、当該区間に近づく前と比べて前記オフセット量を小さくしたラインを新たな前記目標走行ラインとして設定可能である、
車両制御装置。
【請求項10】
請求項1又は2に記載の車両制御装置であって、
前記操舵制御部は、前記他車線を前記道路が有し、且つ、前記認識部によって認識された前記周辺状況についての信頼度が所定値以上である場合に、前記車線中央ラインから左方又は右方へ前記オフセット量だけオフセットしたラインを前記目標走行ラインとして設定可能に構成される、
車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両を制御する車両制御装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
近年、脆弱な立場にある交通参加者にも配慮した持続可能な輸送システムへのアクセスを提供するための取り組みが活発化している。この取り組みの1つとして、交通の安全性や利便性をより改善すべく、自動車等の車両における運転支援技術や自動運転技術に関する研究開発が行われている。
【0003】
運転支援技術の一例として、下記特許文献1には、車線維持制御の実行中に、左側物標から右方向に所定距離だけ離れた位置を通って自車線に沿って延びる左限界ラインを左端ラインとして設定し、右側物標から左方向に所定右側離間距離だけ離れた位置を通って自車線に沿って延びる右限界ラインを右端ラインとして設定し、左端ラインと右端ラインとが左右順に設定されている場合において、車線中央ラインが左端ラインと右端ラインとの間にないときには、左端ライン及び右端ラインのうち、車線中央ラインに近い方のラインを目標走行ラインとして設定するようにした技術が開示されている。
【0004】
また、下記特許文献2には、車両が障害物を回避して走行するための基本回避軌跡を、車両とその障害物との相対速度に応じて、当該車両の進行方向に拡大した移動体回避軌跡に基づいて、車両のアクチュエータを制御して当該車両の走行を支援するようにした技術が開示されている。
【先行技術文献】
【特許文献】
【0005】
特開2023-063625号公報
特開2014-080046号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、従来技術では、自車両が走行する自車線の左側又は右側に物標(例えば他車両)が存在する区間と、そのような物標が存在しない区間とで、自車線の車線中央ラインから目標走行ラインまでのオフセット量が変動し得る。そして、このような目標走行ラインに沿って自車両を走行させることにより、自車線の車線中央ラインに対して自車両が左右にふらつき、自車両の運転者に違和感を与えてしまうことがあった。
【0007】
本発明は、自車線の車線中央ラインに対して車両が左右にふらつくのを抑制しつつ、適切な目標走行ラインに沿って車両が走行するのを支援可能な車両制御装置を提供する。そして、延いては、交通の安全性を改善し、持続可能な輸送システムの発展に寄与するものである。
【課題を解決するための手段】
【0008】
本発明の一態様は、
車両を制御する車両制御装置であって、
前記車両が走行する自車線と、当該自車線を有する道路とを含む前記車両の周辺状況を認識する認識部と、
前記認識部によって認識された前記周辺状況に基づき、前記自車線における前記車両の目標走行ラインを設定し、当該目標走行ラインに沿って前記車両が走行するように前記車両の操舵を制御する操舵制御部と、
を備え、
前記操舵制御部は、
前記道路にて、前記自車線に隣接する他車線を有する場合に、前記自車線の車線中央ラインから左方又は右方へ所定のオフセット量だけオフセットしたラインを前記目標走行ラインとして設定可能に構成される、
車両制御装置である。
【発明の効果】
【0009】
本発明によれば、自車線の車線中央ラインに対して自車両が左右にふらつくのを抑制しつつ、適切な目標走行ラインに沿って自車両が走行するのを支援可能な車両制御装置を提供できる。
【図面の簡単な説明】
【0010】
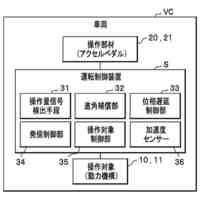
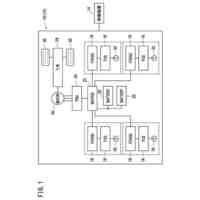
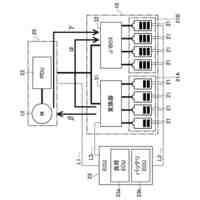
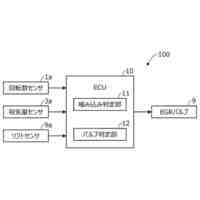
一実施形態の制御装置30を備える車両の概略構成を示すブロック図である。
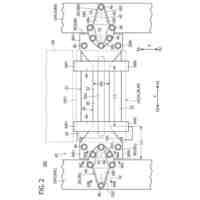
制御装置30による車両の制御の第1例を示す図である。
制御装置30による車両の制御の第2例を示す図である。
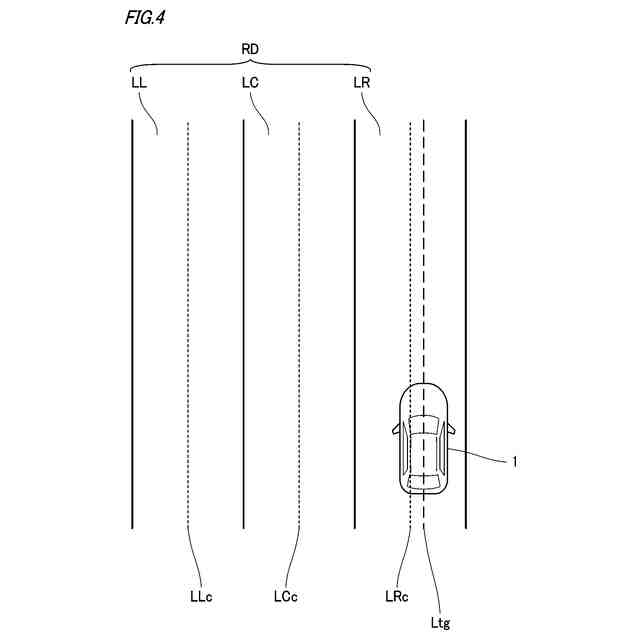
制御装置30による車両の制御の第3例を示す図である。
制御装置30による車両の制御の第4例を示す図である。
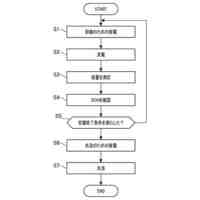
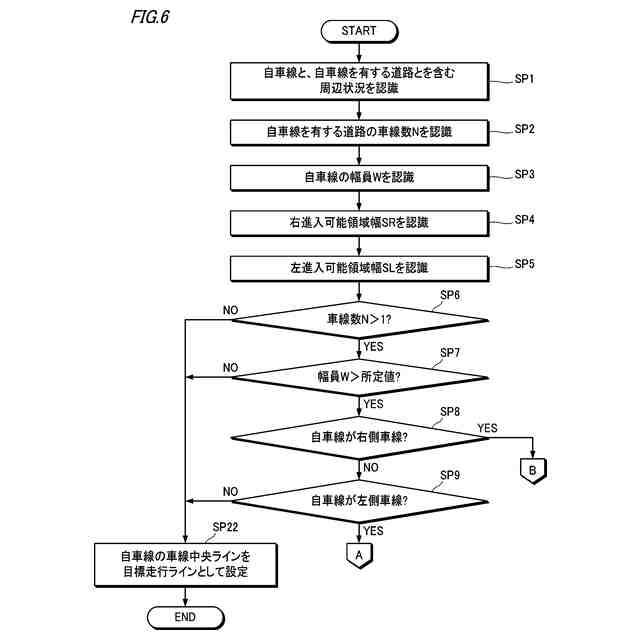
制御装置30が実行する処理の一例を示すフローチャート(その1)である。
制御装置30が実行する処理の一例を示すフローチャート(その2)である。
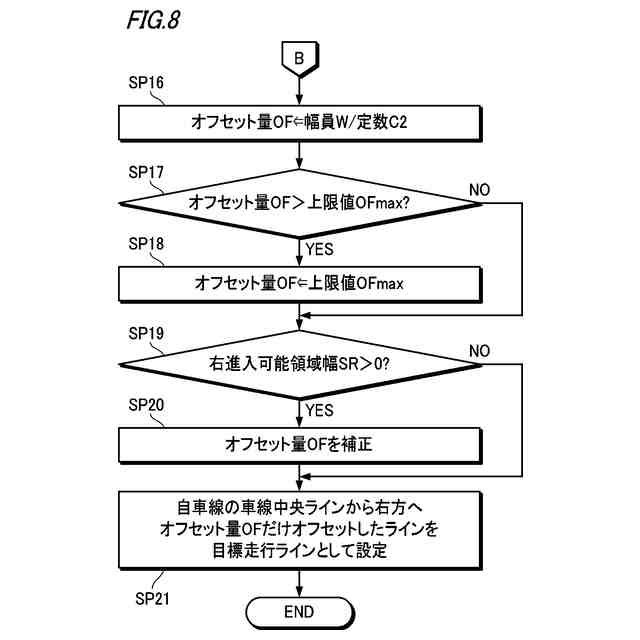
制御装置30が実行する処理の一例を示すフローチャート(その3)である。
制御装置30による車両の制御の変形例を示す図(その1)である。
制御装置30による車両の制御の変形例を示す図(その2)である。
制御装置30による車両の制御の変形例を示す図(その3)である。
制御装置30による車両の制御の変形例を示す図(その4)である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
モータ
2日前
本田技研工業株式会社
保管装置
今日
本田技研工業株式会社
車両構造
2日前
本田技研工業株式会社
受電装置
今日
本田技研工業株式会社
送電装置
今日
本田技研工業株式会社
断続装置
今日
本田技研工業株式会社
固体電池
今日
本田技研工業株式会社
保管装置
今日
本田技研工業株式会社
車両構造
2日前
本田技研工業株式会社
内燃機関
5日前
本田技研工業株式会社
内燃機関
5日前
本田技研工業株式会社
リアクトル
5日前
本田技研工業株式会社
潤滑システム
今日
本田技研工業株式会社
運転制御装置
2日前
本田技研工業株式会社
分離システム
2日前
本田技研工業株式会社
電源システム
今日
本田技研工業株式会社
放電処理方法
今日
本田技研工業株式会社
モータ支持構造
2日前
本田技研工業株式会社
能動型防振装置
2日前
本田技研工業株式会社
モータ制御装置
今日
本田技研工業株式会社
鞍乗り型電動車両
2日前
本田技研工業株式会社
鞍乗り型電動車両
2日前
本田技研工業株式会社
バッテリシステム
2日前
本田技研工業株式会社
二酸化炭素回収装置
今日
本田技研工業株式会社
二酸化炭素回収装置
今日
本田技研工業株式会社
撮像装置の取付構造
今日
本田技研工業株式会社
二酸化炭素回収装置
今日
本田技研工業株式会社
EGRバルブ制御装置
2日前
本田技研工業株式会社
水上移動体用推進装置
2日前
本田技研工業株式会社
水上移動体用推進装置
2日前
本田技研工業株式会社
水上移動体用推進装置
2日前
本田技研工業株式会社
水上移動体用推進装置
2日前
本田技研工業株式会社
水上移動体用推進装置
2日前
本田技研工業株式会社
送電装置及び受電装置
今日
本田技研工業株式会社
送電装置及び受電装置
今日
本田技研工業株式会社
水素同位体分離システム
5日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ