TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025142793
公報種別
公開特許公報(A)
公開日
2025-10-01
出願番号
2024042354
出願日
2024-03-18
発明の名称
把持装置
出願人
NTN株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
15/08 20060101AFI20250924BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】段取り替え時に把持する対象のワークの高さが異なる場合でも、簡単に爪の根元から揺動回転軸までの長さを変更することができる把持装置を提供する。
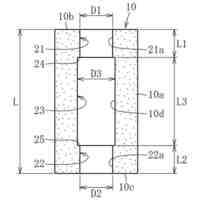
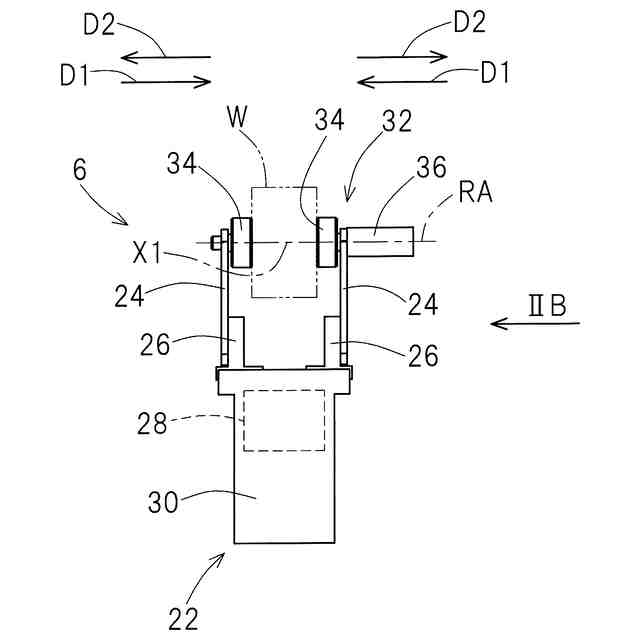
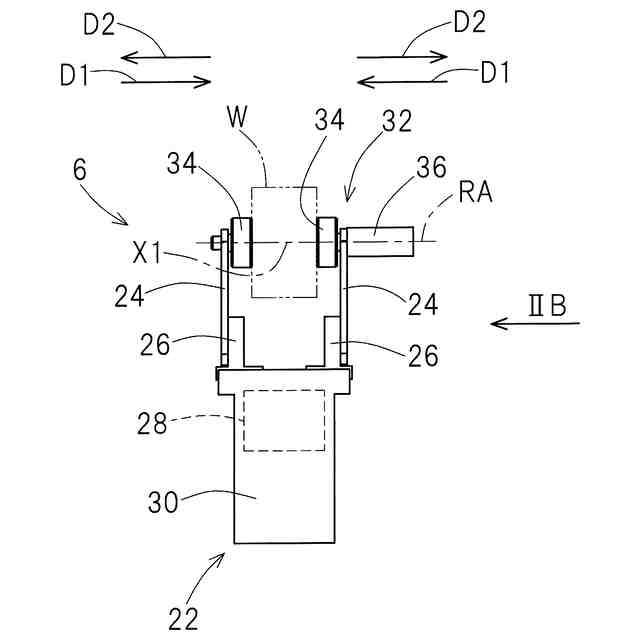
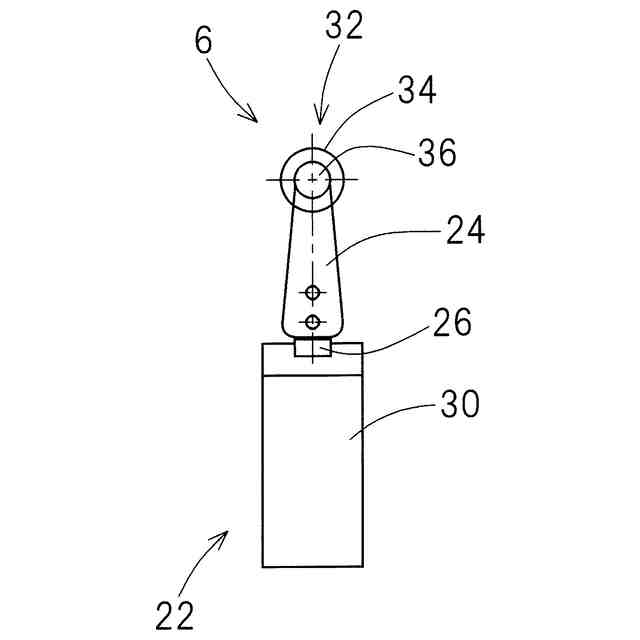
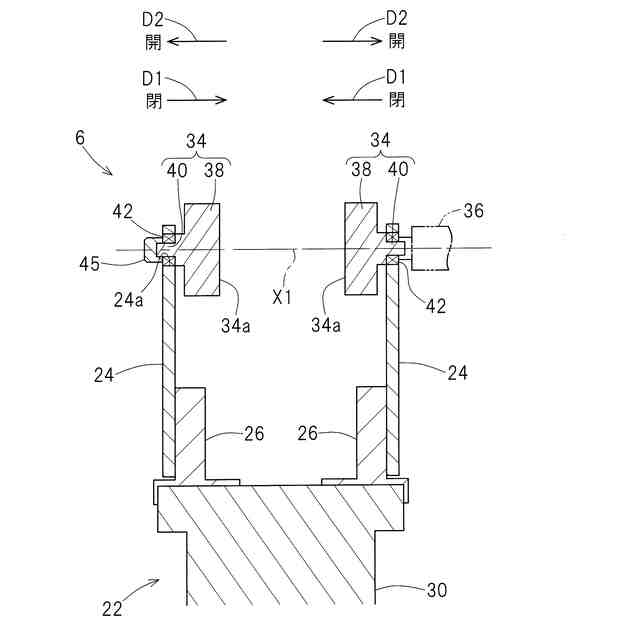
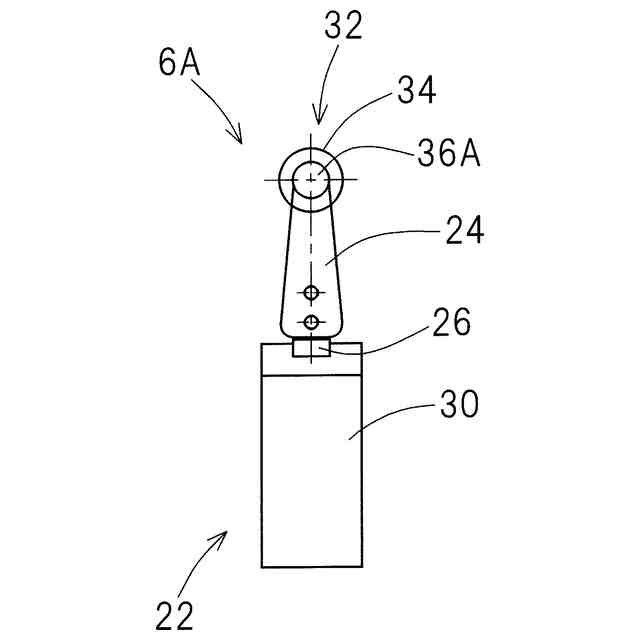
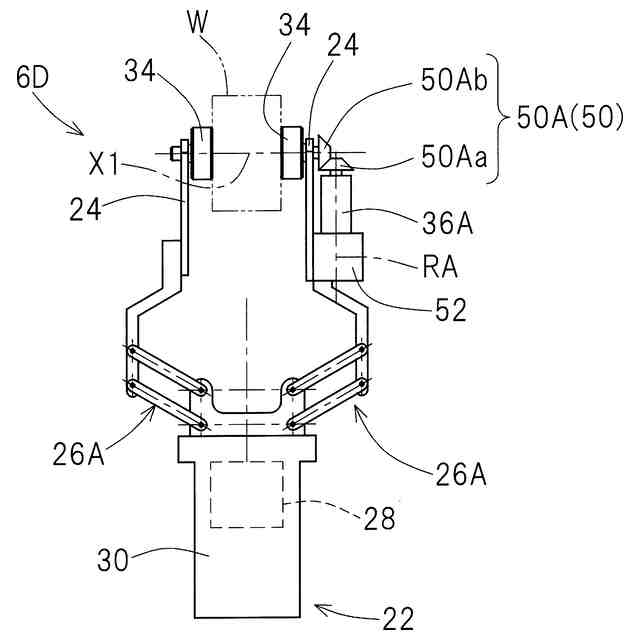
【解決手段】本開示の把持装置6は、ワークWを把持または解放する複数の爪部24と、開閉方向に爪部24を移動させる把持部22と、爪部24で把持されたワークWを開閉方向に平行な回転軸心回りに回転させる回転機構32とを備えている。把持部22は、爪部24が取り付けられて開閉方向に移動する把持機構26と、把持機構26を開閉方向に移動させる第1駆動源28とを有している。回転機構32は、複数の爪部24の各々に取り付けられて爪部24に対して回転軸心回りに回転可能な回転部34と、少なくとも一つの爪部24に取り付けられて回転部34を回転軸心回りに回転駆動させる第2駆動源36とを有している。回転機構32は、爪部24とともに開閉方向に移動する。
【選択図】図2A
特許請求の範囲
【請求項1】
ワークを把持または解放する複数の爪部と、
前記ワークを把持する把持方向および前記ワークを離す解放方向に前記爪部を移動させる把持部と、
前記爪部で把持された前記ワークを把持方向および解放方向に平行な回転軸心回りに回転させる回転機構と、
を備え、
前記把持部は、前記爪部が取り付けられて把持方向および解放方向に移動する把持機構と、前記把持機構を把持方向および解放方向に移動させる第1駆動源とを有し、
前記回転機構は、
複数の前記爪部の各々に取り付けられて前記爪部とともに把持方向および解放方向に移動し、前記爪部に対して前記回転軸心回りに回転可能な回転部と、
少なくとも一つの前記爪部に取り付けられて前記爪部とともに把持方向および解放方向に移動し、前記回転部を前記回転軸心回りに回転駆動させる第2駆動源と、
を有している把持装置。
続きを表示(約 410 文字)
【請求項2】
請求項1に記載の把持装置において、前記第2駆動源がモータである把持装置。
【請求項3】
請求項1または2に記載の把持装置において、前記回転機構は、さらに、前記第2駆動源の動力を前記回転部に伝達する動力伝達機構を有し、
前記第2駆動源の回転軸が、前記回転部の回転軸に直交している把持装置。
【請求項4】
請求項3に記載の把持装置において、前記動力伝達機構が傘歯車である把持装置。
【請求項5】
請求項1または2に記載の把持装置において、前記回転機構は、さらに、前記第2駆動源の動力を前記回転部に伝達する動力伝達機構を有し、
前記第2駆動源の回転軸が、前記回転部の回転軸に平行にオフセットされている把持装置。
【請求項6】
請求項5に記載の把持装置において、前記動力伝達機構が、帯状の無端動力伝達部材である把持装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、機械部品、電子部品等のワークを把持する把持装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
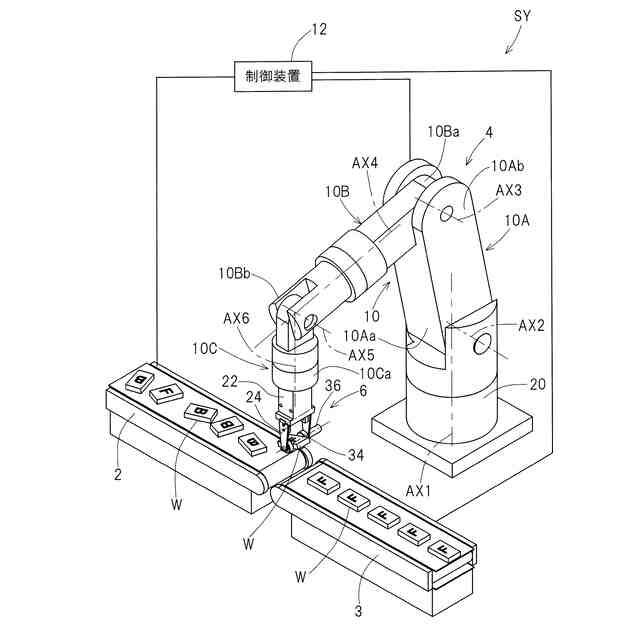
多関節ロボット等の先端に設置されたハンドにおいて、爪を直線方向に開閉することでワークを把持し、爪で把持した状態でワークの姿勢を変更するものがある(例えば、特許文献1,2)。
【先行技術文献】
【特許文献】
【0003】
特許5617512号公報
特許6029561号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1のハンドは、爪の開閉方向に延びるシャフトに回転可能にナットが設けられ、このナットを介して爪に回転を伝達することで、ワークを把持したまま爪を揺動させている。特許文献2のハンドは、爪の開閉方向に延びるボールねじにナットが螺合され、このナットを介して爪に回転を伝達することで、ワークを把持したまま爪を揺動させている。このように、特許文献1および2のハンドでは、ワークを把持する機構と、把持したワークの姿勢を変更する機構とが一体になっている。そのため、例えば、段取り替え時に把持する対象のワークの高さが異なる場合、爪の根元から揺動回転軸までの長さを簡単に変更することができなかった。
【0005】
本発明の目的は、段取り替え時に把持する対象のワークの高さが異なる場合でも、簡単に爪の根元から揺動回転軸までの長さを変更することができる把持装置を提供する。
【課題を解決するための手段】
【0006】
本発明の把持装置は、ワークを把持または解放する複数の爪部と、前記ワークを把持する把持方向および前記ワークを離す解放方向に前記爪部を移動させる把持部と、前記爪部で把持された前記ワークを把持方向および解放方向に平行な回転軸心回りに回転させる回転機構とを備えている。前記把持部は、前記爪部が取り付けられて把持方向および解放方向に移動する把持機構と、前記把持機構を把持方向および解放方向に移動させる第1駆動源とを有している。前記回転機構は、複数の前記爪部の各々に取り付けられて前記爪部に対して前記回転軸心回りに回転可能な回転部と、少なくとも一つの前記爪部に取り付けられて前記回転部を前記回転軸心回りに回転駆動させる第2駆動源とを有している。前記回転機構は、前記爪部とともに把持方向および解放方向に移動する。
【0007】
この構成によれば、把持部の把持機構に取り付けられた爪部の先端に、回転機構の回転部が別途設けられており、回転部が、爪部の把持方向および解放方向に平行な回転軸心回りにワークを回転させる。把持機構は第1駆動源の動力で移動し、回転部は第2駆動源の動力で回転する。つまり、把持機構と回転部は独立して設けられている。これにより、段取り替え時に把持する対象のワークの高さが異なる場合であっても、爪部およびこれに支持された回転機構の交換で済み、把持部を変更する必要はない。その結果、爪部の根元から回転軸までの長さを簡単に変更することができる。
【0008】
本発明において、前記第2駆動源がモータであってもよい。この構成によれば、ワークの姿勢を任意の傾きに容易に変更することができる。
【0009】
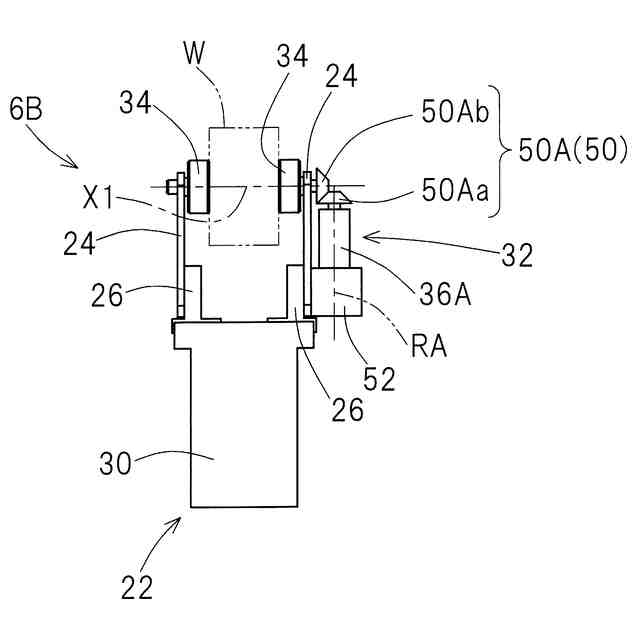
本発明において、前記回転機構は、さらに、前記第2駆動源の動力を前記回転部に伝達する動力伝達機構を有し、前記第2駆動源の回転軸が前記回転部の回転軸に直交していてもよい。この場合、前記動力伝達機構は、例えば、傘歯車である。この構成によれば、把持方向または解放方向に第2駆動源が突出する突出量を小さくできる。
【0010】
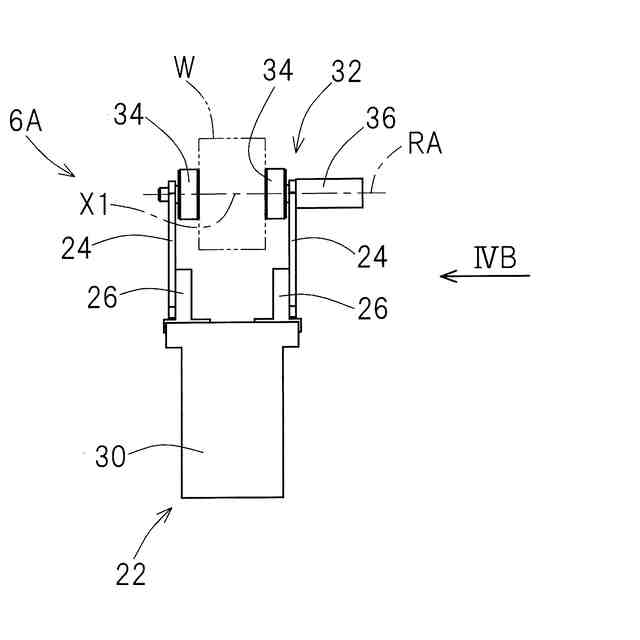
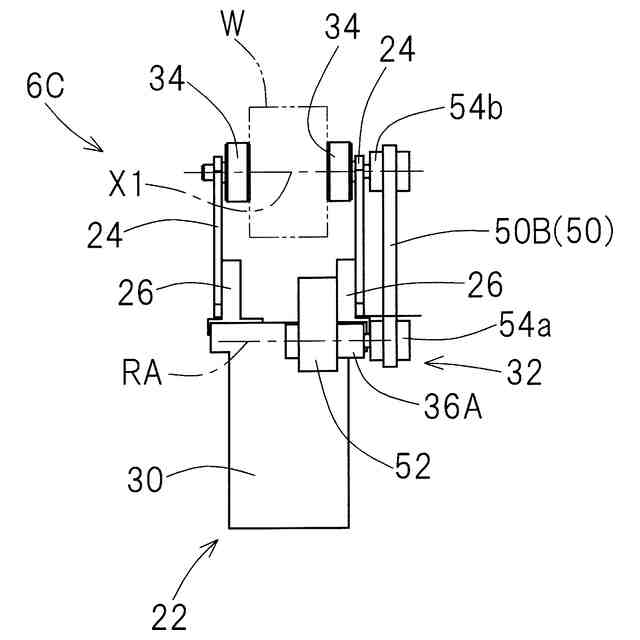
本発明において、前記回転機構は、さらに、前記第2駆動源の動力を前記回転部に伝達する動力伝達機構を有し、前記第2駆動源の回転軸が、前記回転部の回転軸に平行にオフセットされていてもよい。この構成によれば、第2駆動源を把持方向または解放方向の内側に配置することができるので、把持方向または解放方向に第2駆動源が突出する量を小さくできる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
NTN株式会社
焼成軸受
1か月前
NTN株式会社
焼成軸受
1か月前
NTN株式会社
焼入れ方法
21日前
NTN株式会社
ボールねじ
22日前
NTN株式会社
円すいころ軸受
22日前
NTN株式会社
ボールねじ装置
22日前
NTN株式会社
ボールねじ装置
22日前
NTN株式会社
密封装置付き軸受
19日前
NTN株式会社
ブーツ付等速自在継手
1か月前
NTN株式会社
転がり軸受の設計方法
27日前
NTN株式会社
環状部品の抜け止め構造
22日前
NTN株式会社
等速自在継手の外側継手部材
1か月前
NTN株式会社
転がり軸受の耐電食性能評価方法
27日前
NTN株式会社
転がり軸受の耐電食性能評価方法
27日前
NTN株式会社
損傷状態診断システムおよび損傷状態診断方法
29日前
NTN株式会社
車輪用軸受装置
27日前
NTN株式会社
ボールねじ装置及びこれを備えた電動アクチュエータ
6日前
個人
手持ち挟持具
21日前
トヨタ自動車株式会社
学習装置
6日前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
株式会社安川電機
ロボット
27日前
株式会社三共コーポレーション
工具保持具
21日前
株式会社不二越
垂直多関節ロボット
6日前
トヨタ自動車株式会社
ロボットハンド
27日前
ニデックインスツルメンツ株式会社
産業用ロボット
19日前
株式会社マキタ
作業機
1か月前
株式会社マキタ
電動工具
6日前
株式会社田村製作所
エンドエフェクタ及びロボット装置
19日前
ファナック株式会社
経路データセット生成
29日前
株式会社ケイズベルテック
物品定量取り分け装置
1か月前
株式会社人機一体
有脚ロボット
29日前
積水ハウス株式会社
固定ピン保持用アタッチメント
27日前
株式会社秦製作所
ジャック差込口ナット締め用の供回り防止レンチ
7日前
泰芳機械股分有限公司
コレット収納装置
1か月前
日本発條株式会社
ケーブルユニット及びその製造方法
19日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ