TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025148973
公報種別
公開特許公報(A)
公開日
2025-10-08
出願番号
2024049379
出願日
2024-03-26
発明の名称
検出装置、及び、検出装置を備える車両
出願人
株式会社NICHIJO
代理人
弁理士法人有古特許事務所
主分類
G01C
3/06 20060101AFI20251001BHJP(測定;試験)
要約
【課題】検出装置において、処理回路が行う演算の負荷を軽減することを目的とする。
【解決手段】本開示の一態様に係る検出装置は、車両に取り付けられた状態において、前記車両の周囲に関して3次元点群データを取得する3次元測距センサと、前記3次元測距センサに接続される処理回路と、を備え、前記3次元点群データは、3次元座標によって表され、前記処理回路は、前記3次元測距センサから前記3次元点群データを取得し、取得した前記3次元点群データから、所定の条件に合致する第1点群データが除外された第2点群データを取得し、取得した前記第2点群データを演算対象として検出対象物の位置を特定するように構成される。
【選択図】図5
特許請求の範囲
【請求項1】
車両に取り付けられた状態において、前記車両の周囲に関して3次元点群データを取得する3次元測距センサと、
前記3次元測距センサに接続される処理回路と、を備え、
前記3次元点群データは、3次元座標によって表され、
前記処理回路は、
前記3次元測距センサから前記3次元点群データを取得し、
取得した前記3次元点群データから、所定の条件に合致する第1点群データが除外された第2点群データを取得し、
取得した前記第2点群データを演算対象として検出対象物の位置を特定するように構成される、検出装置。
続きを表示(約 1,200 文字)
【請求項2】
前記所定の条件は、前記車両の長手方向における前記車両からの距離に関する第1条件を含み、
前記処理回路は、前記距離が所定距離以上である前記3次元座標を有する前記3次元点群データを、前記第1点群データとするように構成される、請求項1に記載の検出装置。
【請求項3】
前記所定の条件は、前記車両の高さ方向における高さに関する第2条件を含み、
前記処理回路は、前記高さが所定の高さ以下である前記3次元座標を有する前記3次元点群データを、前記第1点群データとするように構成される、請求項1に記載の検出装置。
【請求項4】
前記処理回路は、前記3次元点群データを所定区間ごとに区切った複数の区間それぞれに存在する前記第2点群データの点データの数を示すヒストグラムを作成し、作成した前記ヒストグラムに基づいて、前記検出対象物の位置を特定するように構成される、請求項1から3のいずれか一項に記載の検出装置。
【請求項5】
複数の前記区間は、前記3次元点群データを前記車両の幅方向に関して所定区間ごとに区切った複数の第1区間を含み、
前記ヒストグラムは、複数の前記第1区間それぞれに存在する前記第2点群データに含まれる点データの数を示す第1ヒストグラムを含む、請求項4に記載の検出装置。
【請求項6】
複数の前記区間は、前記3次元点群データを前記車両の長手方向に関して所定区間ごとに区切った複数の第2区間を含み、
前記ヒストグラムは、複数の前記第2区間それぞれに存在する前記第2点群データに含まれる点データの数を示す第2ヒストグラムを含む、請求項4に記載の検出装置。
【請求項7】
前記処理回路は、前記3次元点群データを取得したあと、前記ヒストグラムを作成する前に、前記第2点群データを前記3次元座標に応じてグループ化し、各グループに含まれる点データの数に基づいて、前記検出対象物に対応する候補グループを取得する、請求項4に記載の検出装置。
【請求項8】
前記処理回路は、前記3次元点群データを取得したあと、前記ヒストグラムを作成する前に、前記3次元点群データにおいて前記第2点群データが含まれる探索範囲を設定する、請求項4に記載の検出装置。
【請求項9】
前記3次元座標は、前記車両の幅方向に沿って延びるX軸と、前記X軸に直交し前記車両の高さ方向に沿って延びるY軸と、前記X軸及び前記Y軸に直交し前記車両の長手方向に沿って延びるZ軸と、を含む座標系の座標である、請求項1から3のいずれか一項に記載の検出装置。
【請求項10】
前記3次元測距センサを複数備え、
複数の前記3次元測距センサは、前記車両の幅方向において互いに間隔を空けて配置される、請求項1から3のいずれか一項に記載の検出装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、検出装置、及び、検出装置を備える車両に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1には、車両に搭載される位置センサが記載されている。位置センサは、一つのビームを発生するビーム発生手段と、ビーム発生手段が発生した一つのビームを複数のビームに変換するビーム変換手段と、ビーム変換手段が変換した複数のビームを同時に走査するビーム走査手段と、ビーム走査手段が走査した複数のビームの検出対象物からの反射を当該複数のビームごとに区別して受信する複数のビーム受信手段と、複数のビーム受信手段それぞれによって受信されたビームごとに検出対象物に関する位置情報を算出する位置情報算出手段と、を備える。
【先行技術文献】
【特許文献】
【0003】
特開平8-248133号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1では、複数のビーム受信手段それぞれによって受信されたビームごとに検出対象物に関する位置情報を算出するが、検出対象物の位置を特定するときに処理回路が行う演算の負荷を軽減することが考慮されていない。
【0005】
本開示は、検出装置、及び、検出装置を備える車両において、処理回路が行う演算の負荷を軽減することを目的とする。
【課題を解決するための手段】
【0006】
本開示の一態様に係る検出装置は、車両に取り付けられた状態において、前記車両の周囲に関して3次元点群データを取得する3次元測距センサと、前記3次元測距センサに接続される処理回路と、を備え、前記3次元点群データは、3次元座標によって表され、前記処理回路は、前記3次元測距センサから前記3次元点群データを取得し、取得した前記3次元点群データから、所定の条件に合致する第1点群データが除外された第2点群データを取得し、取得した前記第2点群データを演算対象として検出対象物の位置を特定するように構成される。
【0007】
本開示の一態様に係る車両は、前記検出装置を備える。
【0008】
本開示の一態様によれば、検出装置、及び、検出装置を備える車両において、処理回路が行う演算の負荷を軽減できる。
【図面の簡単な説明】
【0009】
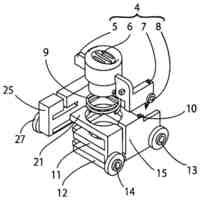
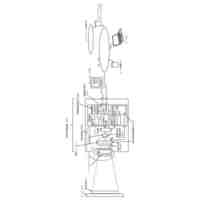
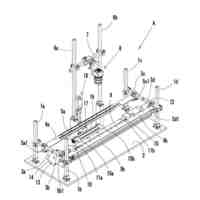
図1は、実施形態に係る検出装置を備える車両の側面図である。
図2は、実施形態に係る検出装置を備える車両の平面図である。
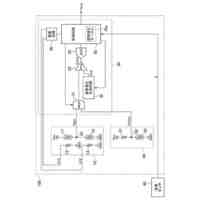
図3は、実施形態に係る車両の制御システムのブロック図である。
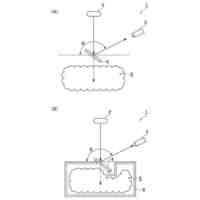
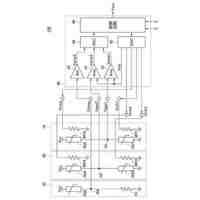
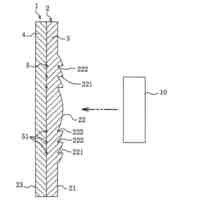
図4は、3次元測距センサが、車両の周囲に関して、3次元点群データを取得する様子を示す模式図である。
図5は、実施形態に係る検出装置の処理回路によって行われる処理のフローチャートである。
図6は、図5のフローチャートの、第1点群データが除外された第2点群データを取得する処理のサブルーチンである。
図7は、図5のフローチャートの、検出対象物の位置を特定する処理のサブルーチンである。
図8は、車両の周囲に関する3次元点群データの概略図である。
図9は、図8の3次元点群データに対して第1情報処理が行われたあとの3次元点群データの概略図である。
図10は、図9の3次元点群データに対して第2情報処理が行われたあとの3次元点群データの概略図である。
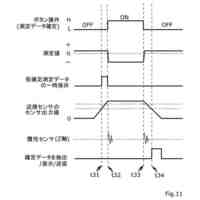
図11は、図10の3次元点群データから検出対象物の候補に対応するグループを抽出した様子を示す模式図である。
図12は、図11の3次元点群データから第2範囲を除外した様子を示す模式図である。
図13は、図12の3次元点群データに基づいて作成された第1ヒストグラムの概略図である。
図14は、図12の3次元点群データに基づいて作成された第2ヒストグラムの概略図である。
図15は、第1ヒストグラム及び第2ヒストグラムに基づいて、図12の3次元点群データにおいて検出対象物の位置が特定された様子を示す模式図である。
【発明を実施するための形態】
【0010】
以下、図面を参照して実施形態が説明される。以下の説明では、車両2の長手方向を単に「長方向」と記載し、車両2の幅方向を単に「幅方向」と記載し、車両2の高さ方向を単に「高さ方向」と記載する場合がある。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社NICHIJO
パレット検出装置、パレット検出方法及びパレット検出プログラム
5日前
個人
メジャー文具
25日前
個人
採尿及び採便具
2日前
個人
アクセサリー型テスター
18日前
個人
高精度同時多点測定装置
17日前
株式会社ミツトヨ
測定器
8日前
ユニパルス株式会社
ロードセル
24日前
アズビル株式会社
電磁流量計
11日前
株式会社ヨコオ
ソケット
23日前
ダイキン工業株式会社
監視装置
22日前
トヨタ自動車株式会社
監視装置
23日前
株式会社チノー
放射光測温装置
24日前
株式会社ヨコオ
ソケット
24日前
エイブリック株式会社
磁気センサ回路
1か月前
大和製衡株式会社
組合せ計量装置
5日前
大和製衡株式会社
組合せ計量装置
5日前
ローム株式会社
半導体装置
16日前
長崎県
形状計測方法
18日前
個人
システム、装置及び実験方法
11日前
TDK株式会社
ガスセンサ
24日前
愛知電機株式会社
軸部材の外観検査装置
5日前
TDK株式会社
磁気センサ
23日前
TDK株式会社
ガスセンサ
1か月前
TDK株式会社
ガスセンサ
29日前
株式会社東芝
重量測定装置
29日前
ローム株式会社
半導体装置
16日前
愛知時計電機株式会社
ガスメータ
8日前
株式会社デンソー
電流センサ
16日前
トヨタ自動車株式会社
測定システム
15日前
TDK株式会社
電磁波センサ
24日前
ダイハツ工業株式会社
移動支援装置
23日前
多摩川精機株式会社
冗長エンコーダ
23日前
日本特殊陶業株式会社
センサ
8日前
三恵技研工業株式会社
融雪レドーム
23日前
中国電力株式会社
電柱管理システム
22日前
三菱マテリアル株式会社
温度センサ
25日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ